Impact sans perte de contrôle
de l'hélicoptère Sikorsky S-76A C-GIMR
exploité par Canadian Helicopters Limited
à Temagami (Ontario)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
L'hélicoptère d'évacuation sanitaire (medevac) Sikorsky S-76A (immatriculé C-GIMR et portant le numéro de série 760079) exploité par Canadian Helicopters Limited effectue un vol de Sudbury à Temagami (Ontario) afin de rejoindre une ambulance terrestre. Vers 22 h 2, heure normale de l'Est, en approche finale de l'hélisurface du lac Snake à Temagami dans des conditions météorologiques de vol à vue de nuit, l'hélicoptère s'écrase dans la zone boisée située au bord du lac. Lourdement endommagé, l'hélicoptère s'immobilise sur son côté gauche. Trois des quatre occupants sont grièvement blessés et sont transportés à l'hôpital.
Renseignements de base
La station météorologique la plus proche était située à North Bay (Ontario), à environ 50 milles marins (nm) au sud de Temagami. Le message météorologique régulier pour l'aviation (METAR) de 22 h, heure normale de l'Est (HNE)Footnote 1, pour North Bay indiquait les renseignements suivants : vent du 140 degrés vrai (°V) à 3 nœuds, visibilité 12 milles terrestres (sm) dans la neige légère, couche de nuages épars à 1600 pieds au-dessus du niveau du sol (agl), couche de nuages fragmentés à 3000 pieds agl, température −6 °C, point de rosée −7 °C, calage altimétrique 29,85 pouces de mercure. Il y avait des chutes de neige faible et modérée dans la région environnante la soirée de l'événement et il n'était pas certain que le vol puisse se poser à Temagami.
L'équipage comprenait le commandant de bord, le copilote et deux ambulanciers paramédicaux.
Le commandant de bord, qui était le pilote aux commandes (PF), était titulaire d'une licence de pilote de ligne valide pour hélicoptères. Le commandant était certifié et qualifié pour le vol conformément à la réglementation en vigueur. Il totalisait environ 3107 heures de vol, dont 2267 heures sur le Sikorsky S-76A. Les dossiers indiquent qu'il avait suivi toutes les formations demandées par la compagnie, notamment sur les règles de vol à vue (VFR) la nuit, les règles de vol aux instruments (IFR) la nuit, les impacts sans perte de contrôle et une formation spécifique sur les trous noirs en approche (désorientation spatiale visuelle). Le commandant s'était déjà rendu à l'endroit de l'événement, à l'occasion d'un vol de jour VFR.
Le copilote, qui était le pilote qui n'était pas aux commandes (PNF), était titulaire d'une licence de pilote professionnel valide pour hélicoptères. Il totalisait environ 1967 heures de vol, dont 147 heures sur le Sikorsky S-76A. Il était certifié et qualifié pour le vol conformément à la réglementation en vigueur. Le copilote avait été embauché en juillet 2007 et il avait suivi toutes les formations nécessaires. Il était relativement nouveau dans les services médicaux d'urgence (EMS) et il ne s'était jamais rendu à l'endroit de l'événement.
La nuit de l'événement, l'hélicoptère a quitté Sudbury à environ 21 h 40 pour un court vol vers l'hélisurface du lac Snake dans la ville de Temagami, située à environ 60 nm au nord-est. L'hélicoptère a monté jusqu'à 2500 pieds avant de se diriger vers Temagami. Pendant la partie initiale du vol, la visibilité n'était pas inférieure à 4 à 5 sm et s'améliorait à mesure que le vol progressait. Le vol se déroulait sans incident et les deux pilotes passaient la plupart de leur temps à discuter des procédures et à coordonner la prise en charge du patient avec le centre de répartition. Au cours de la dernière minute et demie de l'approche, le PF expliquait au PNF ce qu'il faisait, étape par étape, et ce qu'il fallait surveiller pendant les approches la nuit, y compris les illusions de trou noir.
L'hélisurface du lac Snake se situe à la périphérie nord-est de la ville. Selon le répertoire des sites d'atterrissage établi par la firme Canadian Helicopters Limited pour le district de Sudbury/Moosonee, l'hélisurface du lac Snake est à une altitude de terrain de 997 pieds au-dessus du niveau de la mer (asl) et elle est composée d'une surface asphaltée de 100 pieds sur 100 pieds munie de cônes rétroréfléchissants sur son périmètre et de cônes de guidage au 220 degrés magnétique (°M) par rapport à l'hélisurface. Quatre des cônes sur le périmètre peuvent être munis de « e-flareFootnote 2 » (feux de signalisation) afin d'améliorer la visibilité.
Pour que ces feux de signalisation soient placés et activés, l'équipage de conduite doit en faire la demande auprès du personnel Services médicaux d'urgence au sol, ce qui n'a pas été fait la nuit de l'événement. Les approches et les départs de l'hélisurface doivent être effectués dans le quadrant sud-ouest (210° M à 260° M).
Le répertoire met en garde contre les dangers suivants :
- fils électriques au sol, le long des côtés est et nord de la zone d'approche et de départ;
- grosses collines au sud, à l'est et au nord du site;
- tour à l'ouest et tour d'observation au sud du site;
- stade de baseball à l'est de l'hélisurface.
De plus, il y a une maison isolée située à côté du terrain de balle qui comporte des lumières ordinaires à l'extérieur de la porte d'entrée.
L'hélicoptère doit survoler la ville et une petite colline afin d'effectuer l'approche de l'hélisurface. La colline commence à 2430 pieds à l'horizontale de l'hélisurface et atteint une altitude d'environ 1017 pieds asl, environ 20 pieds plus haut que l'hélisurface. La colline descend doucement pour atteindre la rive du lac à 723 pieds à l'horizontale de l'hélisurface, laquelle se situe sur la rive opposée du lac (voir l'annexe A - Carte topographique de Temagami).
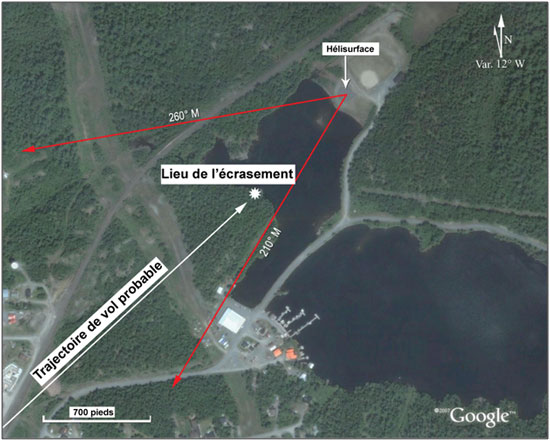
L'hélicoptère a approché l'hélisurface du sud-ouest avec un cap d'environ 048 ° M avant de se retrouver dans les arbres près du bord du lac à environ 814 pieds à l'horizontale de l'hélisurface (voir l'annexe B - Hélisurface du lac Snake).
Les arbres sur la trajectoire d'approche mesuraient environ 40 pieds de hauteur. L'hélicoptère a percuté des arbres qui se trouvaient sur la pente descendante de la colline, à environ 70 pieds à l'horizontale de la rive, là où la pente de la colline est 10 pieds plus haute que l'hélisurface. Ainsi, la hauteur moyenne des arbres était d'environ 50 pieds plus haut que l'hélisurface. La descente à travers les arbres était presque à la verticale, avec pratiquement aucun mouvement horizontal, le nez de l'hélicoptère s'immobilisant à environ 15 pieds de la rive. Le diamètre du rotor de l'hélicoptère était de 44 pieds et les dommages causés aux arbres se trouvaient principalement dans ce périmètre. Les pales de rotor ont été complètement détruites. Pendant la descente, un arbre a traversé le compartiment du train d'atterrissage gauche, la batterie de bord, ainsi que le plancher moteur et le collecteur d'échappement du moteur droit. Il y avait des signes de chaleur et de brûlures sur l'arbre compatibles avec la chaleur dégagée par un moteur en marche, mais il n'y a pas eu d'incendie après l'impact.
Il n'y avait pas de signes externes de dommages sur le moteur gauche et les compresseurs des deux moteurs ne semblaient pas avoir subi de dommages. La position des interrupteurs dans le poste de pilotage correspondait à une configuration en vol et les interrupteurs de projecteur de recherche et de feux d'atterrissage étaient dans la position « ON ». Les manettes de puissance étaient en position de vol; les poignées coupe-feu étaient en position normale. Le circuit carburant est un système composé de deux réservoirs, un droit et un gauche; la position normale en vol de la manette de carburant est la position d'alimentation directe, le réservoir gauche alimentant le moteur gauche et le réservoir droit alimentant le moteur droit. La manette de carburant gauche était dans la position d'intercommunication, alors que la manette de carburant droite était dans la position d'alimentation directe. La position d'intercommunication de la manette de carburant gauche n'aurait pas pu influencer le fonctionnement du moteur et il est probable que la manette a simplement été déplacée dans cette position après l'accident.
La fixation de la ceinture de sécurité qui retenait l'ambulancier paramédical assis sur le siège à droite faisant face à l'arrière s'est rompue en surcharge. Bien que les sièges des ambulanciers étaient équipés de ceintures de sécurité à quatre points, aucun des deux ambulanciers ne portait le harnais de sécurité.
La ceinture de sécurité comprend une attache standard en acier en forme de crochet et un mécanisme de fermeture à ressort qui se fixe sur un écrou à manchon fileté en aluminium vissé dans l'axe d'articulation du dossier arrière. L'axe d'articulation du dossier arrière est conçu pour traverser l'écrou à manchon fileté jusqu'au bout de la cannelure usinée. Cet écrou s'est rompu à l'endroit où l'axe se terminait (voir la Figure 1). Le matériau était aminci dans la cannelure de l'écrou à manchon fileté en raison d'usure causée par l'attache en acier inoxydable de la ceinture de sécurité.
Un examen détaillé de l'hélicoptère n'a révélé aucune anomalie qui aurait pu avoir des répercussions sur ses caractéristiques de vol. Les deux moteurs ont été envoyés à Rolls Royce pour qu'on les examine. Le moteur gauche a été jugé en état de marche puisqu'il a pu démarrer et tourner avec succès sur le banc d'essai. Le moteur droit ne pouvait pas tourner étant donné les dommages subis lors de l'impact avec l'arbre qui a traversé l'hélicoptère. Aucun autre dommage n'a été constaté qui aurait pu empêcher le moteur de tourner.
L'hélicoptère était muni d'un système d'avertissement de proximité du sol amélioré (EGPWS), de deux appareils système de positionnement global (GPS)/navigation/communication GNS 530 de Garmin, d'un système de suivi par satellite SkyNode de Latitude Technologies et d'un enregistreur de conversations de poste de pilotage (CVR). Ces composants ont été recueillis et analysés.
Les appareils EGPWS et Garmin n'ont révélé aucune information pertinente. L'appareil SkyNode de Latitude Technologies est une combinaison d'un GPS et d'un émetteur de satellite. L'appareil fonctionne en envoyant régulièrement un relevé de position (environ à chaque deux minutes dans ce cas-ci) à un satellite qui renvoie les données à un poste au sol qui à son tour envoie les données à un ordinateur exploité par Latitude Technologies, où les renseignements sont enregistrés. Un exploitant peut communiquer avec le serveur et examiner les anciens vols ou surveiller les vols en cours. Il a été noté que l'appareil SkyNode contenait une mémoire non volatile qui pouvait retenir les données non transmises. L'examen de la mémoire a révélé que toutes les données, dont les coordonnées, avaient été transmises et enregistrées, mais la dernière position enregistrée était à deux milles de l'hélisurface.
En plus des enregistrements de conversations et du microphone de poste de pilotage, le CVR a également enregistré des données sur le régime du rotor. L'hélicoptère et les moteurs ne présentaient aucune anomalie de fonctionnement avant l'impact et l'hélicoptère suivait le bon profil de descente jusqu'à ce qu'il atteigne 500 pieds agl et qu'il soit à 0,5 nm de l'hélisurface, 21,5 secondes avant l'impact. Le PF pensait que l'hélicoptère était trop haut et il a apporté des corrections en ce sens. Au même moment, le microphone du poste de pilotage a capté le son du régime du rotor qui augmentait un peu, avant de baisser tout juste avant l'impact. L'enregistrement du régime du rotor a également confirmé qu'il y a eu une augmentation du régime du rotor, suivie d'une baisse tout juste avant l'impact. Le PNF n'a pas remis en question l'écart par rapport au profil de descente correct effectué par le PF, pas plus qu'il n'a annoncé la vitesse ou l'altitude après cet écart.
Selon une étude réalisée par l'United States Air Force dont le titre est « Running Head: BLACK HOLE ILLUSIONFootnote 3 » (Titre courant : ILLUSION DU TROU NOIR), la désorientation spatiale (DS) est définie par Gillingham comme « une perception erronée de sa position et de son mouvement par rapport à la surface de la terreFootnote 4 ». L'étude indique également :
[Traduction]
La désorientation spatiale (DS) visuelle est souvent citée comme facteur contributif dans les accidents d'aviation. L'illusion du trou noir (ITN), type d'illusion spécifique associée à une surface sans relief, est une des formes de DS visuelle auxquelles les pilotes font le plus souvent face. Un environnement d'ITN ne réfère pas à la piste, mais plutôt à ce qui l'entoure et à l'absence de repères dans l'environnement pouvant permettre au pilote de poursuivre le vol à vue. Ce qui pose problème, c'est que le pilote, malgré le manque de repères visuels, se sent quand même en confiance et continue son approche à vue. L'environnement d'atterrissage sans relief peut donner à un pilote l'impression qu'il suit une pente trop prononcée (qu'il se trouve au-dessus de la trajectoire de descente prévue) et l'amener à surestimer l'angle de descente perçu (ADP) par rapport à la piste. Ainsi, un pilote risque d'amorcer inutilement une descente agressive, ce qui a pour résultat un angle d'approche beaucoup trop faible (au-dessous de la trajectoire de descente correcte de l'atterrissage) pour éviter les obstacles.
La formation dispensée par Canadian Helicopters comprend une heure dans le simulateur à effectuer des vols VFR. Ces vols sont accomplis vers des pistes et des hélisurfaces qui présentent des environnements de trou noir, afin qu'il soit nécessaire d'appliquer des techniques d'approche et de départ de trou noir. Les vols commencent normalement par un ciel dégagé et étoilé pour ensuite évoluer au point où le ciel devient couvert et la visibilité réduite. Le plafond et la visibilité sont tous deux progressivement abaissés de sorte que le vol doit devenir IFR et les membres de l'équipage de conduite doivent préparer et effectuer une approche IFR de l'aéroport local. L'exercice est habituellement interrompu après l'approche IFR.
Le manuel d'exploitation de Canadian Helicopters, partie III - IFR/VFR de nuit, précise les exigences d'équipement et les procédures se rapportant aux approches de trou noir. La rubrique 1.16, site de poser/trou noir - approche, indique :
[Traduction]
1) En raison de la grande variété en matière d'hélisurface et de leur environnement immédiat, les atterrissages de nuit sont probablement les approches qui posent le plus de difficultés. Le peu (ou l'absence) de lumière dans la périphérie fait en sorte qu'il est difficile de s'appuyer sur les repères visuels. Une procédure structurée des approches de nuit/de trou noir s'appuyant fortement sur les instruments de l'aéronef est nécessaire. Il faut se préparer longtemps à l'avance avant d'entamer l'approche finale.
La rubrique continue avec les points suivants :
[Traduction]
4) Aux héliports qui n'ont qu'un cheminement d'entrée et de sortie, il faut faire attention de ne pas effectuer une approche en vent arrière. En premier lieu, cherchez des sites de poser de rechange. Si cela n'est pas possible, limitez l'approche en vent arrière à une composante vent arrière de 15 nœuds.
- L'altimètre radar du PNF doit être réglé à 500 pieds et l'altimètre radar du PF doit être réglé à 150 pieds.
- Effectuez une descente de l'altitude de croisière pour atteindre une hauteur de circuit de 1000 pieds agl et 80 % de la vitesse indiquée (IAS) de croisière.
- Les hélisurfaces qui n'ont que des cônes rétroréfléchissants doivent être aperçus et illuminés avant de continuer l'approche.
- Agencez le circuit de manière à permettre que le virage entre l'étape de base et le parcours final se fasse à 1 nm. Planifiez la descente afin qu'à 0,5 nm de l'hélisurface vous soyez à 500 pieds agl et à une vitesse indiquée (KIAS) de 50 nœuds.
- L'utilisation du GPS est essentiel pendant l'approche afin de déterminer la distance séparant l'appareil de l'hélisurface ainsi que de déterminer les composantes de vent debout et de vent arrière.
- Toutes les combinaisons possibles de projecteur et de feux d'atterrissage devraient être utilisées pour illuminer la trajectoire d'approche et la zone d'atterrissage.
- Le PNF devrait surveiller la vitesse indiquée, le variomètre (VSI) et l'altimètre radar.
- Continuez à descendre de 500 pieds à une vitesse verticale stable tout en réduisant graduellement la vitesse indiquée à mesure que le point de décision à l'atterrissage (LDP) approche.
- Les deux pilotes devraient confirmer qu'ils ont de bons repères visuels avant de continuer à descendre sous les 200 pieds.
- Au LDP (100 pieds et VSDFootnote 5), augmentez le collectif et réduisez la vitesse indiquée afin d'établir un vol stationnaire stabilisé au-dessus de l'aire de poser.
L'altimètre radar du PF n'était pas réglé à 150 pieds pendant l'approche et ni l'altitude ni la vitesse indiquée n'ont été annoncées après avoir dépassé 0,5 nm et 500 pieds.
La rubrique 2.62 des procédures d'utilisation normalisées (SOP) de Canadian Helicopters explique davantage les procédures détaillées en matière de vol stationnaire dans les cas de trou noir. La rubrique sur les profils d'atterrissage de cette SOP explique les mesures à prendre :
[Traduction]
- Atteignez une vitesse d'approche de 50 KIAS à 500 pieds agl. Une approche finale stabilisée devrait commencer avec les « ailes horizontales » à pas moins de 0,5 nm du site de poser et 500 pieds au-dessus. L'angle de la pente d'approche sera modérément raide à environ 8 degrés (16 %).
- Après avoir passé 500 pieds agl, ajustez l'assiette avec la commande de pas cyclique pour ralentir à une vitesse minimale de 35 KIAS. Au cours de cette étape de la descente, l'aéronef sera cabré à environ 5 degrés. Le couple devrait demeurer à plus ou moins 40 % et ne devrait pas dépasser 55 % (limites en cas d'un moteur hors service). La vitesse verticale de descente ne doit pas excéder 750 pieds par minute.
- Ne visez pas l'hélisurface. Ajustez l'image de visée afin d'avoir en mire un point au-delà du point de poser prévu. Ainsi, l'aéronef pourra s'enfoncer lorsqu'il ralentira au point où il n'y aura plus de portance de translation.
- En pratique, le LDP n'est pas fixe et dépend du poids de l'aéronef, du vent, des obstacles et de la hauteur de l'hélisurface. Un LDP normal est à 100 pieds et 35 kts. Cependant, ceci ne peut pas être utilisé dans des situations où des obstacles sont dans la trajectoire prévue de remise des gaz. Augmentez l'élévation du LDP en fonction des obstacles qui sont plus hauts que l'hélisurface. Par exemple, un obstacle de 30 pieds en travers d'une trajectoire de remise des gaz fera en sorte que le LDP devra être de 130 pieds. Ajustez le LDP en fonction des obstacles. Déclarez-vous « engagé » lorsqu'il n'est plus possible de remettre les gaz.
- Après avoir dépassé le LDP, augmentez le collectif légèrement et ajustez l'assiette afin de décélérer lentement davantage. Le couple devrait être augmenté à 55 % alors que l'aéronef survole la partie avant de l'hélisurface. Ajustez l'arrondi afin de survoler la zone de poser à environ 25 à 30 pieds agl tout en augmentant la puissance pour contrôler la vitesse verticale de descente.
- Continuez à augmenter le collectif afin d'établir un vol stationnaire.
Analyse
L'hélicoptère ne présentait aucune anomalie qui aurait pu contribuer à l'accident. L'analyse porte donc sur l'exploitation de l'hélicoptère.
L'hélisurface du lac Snake est une approche de trou noir classique. Temagami en soi est une petite collectivité et l'hélisurface est située à la périphérie nord-est de la ville. L'approche se fait au-dessus de la ville et de toutes les lumières avant d'atteindre un environnement relativement sans relief. Les seules lumières visibles sont celles de la maison à côté du terrain de balle. Sur le sol le long de la trajectoire d'approche, une petite colline commence à s'élever à 2430 pieds à l'horizontale de l'hélisurface. L'élévation de la colline atteint 20 pieds avant de descendre doucement jusqu'au lac à 723 pieds à l'horizontale de l'hélisurface. Les arbres mûrs jonchant la trajectoire d'approche augmentent l'élévation des obstacles par 40 pieds de plus. Toutefois, un angle d'approche en pente raide de 8 degrés du site d'atterrissage aurait permis un espacement suffisant entre les arbres et l'appareil, qui aurait alors pu se poser en sûreté.
L'approche de trou noir nécessite une surveillance rigoureuse des instruments de bord. L'équipage de conduite a respecté la plupart des SOP pendant l'approche et les bons signaux ont été utilisés. Dans le cas présent, le PNF surveillait la vitesse indiquée, l'altitude et la distance les séparant de l'hélisurface. Il communiquait ces renseignements au PF régulièrement. Le PF effectuait une approche à vue et il utilisait les renseignements fournis par le PNF en plus des repères visuels comme points de référence. Cependant, l'altimètre radar du PF n'était pas réglé à 150 pieds comme le veut le manuel d'exploitation. S'il avait effectivement eu ce réglage, l'équipage de conduite aurait eu un signe additionnel que l'aéronef approchait le sol trop tôt pendant la descente vers l'hélisurface. L'hélicoptère était en approche stabilisée et il présentait un profil de descente correct de 8 degrés, conformément au manuel d'exploitation et aux SOP.
Pendant la minute et demie qu'a duré l'approche, l'attention du PF était divisée entre piloter l'approche et expliquer le pourquoi des choses et ce qu'il faut surveiller pendant une approche de trou noir. Ces explications ont probablement distrait les pilotes des tâches qu'ils devaient accomplir. Dans le cas présent, le PF a annoncé 0,5 nm et 500 pieds, une condition du profil de descente, mais visuellement il a jugé que l'hélicoptère était trop haut et il a donc augmenté la vitesse verticale de descente. Ces mesures coïncident avec l'augmentation du régime du rotor, ce qui indique que le collectif a été abaissé, entraînant ainsi une diminution de la charge sur les pales du rotor et une augmentation de la vitesse verticale de descente. Il s'en est suivi une diminution du régime du rotor alors que le collectif était augmenté, augmentant ainsi la charge sur les pales du rotor et réduisant la vitesse verticale de descente tout juste avant l'impact. Le PNF n'a pas remis en question l'écart par rapport au profil de descente correct effectué par le PF, pas plus qu'il n'a signalé la vitesse ou l'altitude après cet écart.
En se fondant sur les renseignements disponibles, une descente de 500 pieds jusqu'au sol en 21,5 secondes équivaut à une vitesse verticale de descente de plus de 1400 pieds par minute - bien au-delà du maximum recommandé de vitesse verticale de descente de 750 pieds par minute. L'importante vitesse verticale de descente a fait en sorte que l'hélicoptère est descendu dans les arbres avant que l'un des pilotes ne se rende compte de ce qui se passait.
L'attache de l'écrou à manchon fileté de la ceinture de sécurité s'est rompue en raison de plusieurs facteurs. En premier lieu, l'écrou à manchon fileté était affaibli dû à l'usure causée par l'attache en acier inoxydable de la ceinture de sécurité. Puis, l'axe d'articulation du dossier arrière ne traversait pas complètement l'écrou à manchon fileté, mais traversait jusqu'à un certain point la cannelure. Il en a résulté un point faible sur le rebord extérieur de l'écrou. Sous des charges normales, comme des forces g avant et arrière, il n'y aurait aucun problème puisque la charge principale serait exercée sur la cannelure et l'axe d'articulation du siège arrière. Cependant, dans le cas d'un impact latéral, la charge principale est exercée dans une direction latérale sur l'extrémité de l'écrou. Ainsi, une charge anormale a été exercée sur l'extrémité de l'écrou manchon fileté et ce dernier s'est rompu à son point faible.
- LP 034/2008 – Analysis of Aircraft Data (analyse des données de l'aéronef)
On peut obtenir ce rapport en s'adressant au Bureau de la sécurité des transports du Canada.
Faits établis
Faits établis quant aux causes et aux facteurs contributifs
- Le pilote aux commandes (PF) a probablement été trompé par une désorientation spatiale visuelle lui faisant penser que l'hélicoptère était trop haut en approche. Alors qu'il corrigeait cette fausse perception, l'hélicoptère s'est écrasé dans les arbres à 814 pieds de l'hélisurface.
- Les pilotes étaient probablement distraits pendant la partie critique de l'approche et ils ne se sont pas rendu compte que l'hélicoptère avait dévié du profil d'approche prévu et de la vitesse verticale de descente recommandée.
Faits établis quant aux risques
- L'écrou à manchon fileté de l'attache de la ceinture de sécurité du siège arrière droit faisant face à l'arrière, siège sur lequel un ambulancier paramédical prenait place, était usé au niveau de la cannelure où la ceinture de sécurité s'attachait, ce qui avait affaibli l'intégrité structurale de l'écrou à manchon fileté, augmentant ainsi le risque qu'il se rompe.
- L'hélicoptère s'est écrasé sur son côté, ce qui a exercé une charge latérale anormale sur l'écrou à manchon fileté de l'attache de la ceinture de sécurité du siège arrière droit faisant face à l'arrière occupé par un ambulancier paramédical et l'écrou s'est rompu.
Mesures de sécurité
À la suite de l'événement, JCM Aerodesign Limited, le titulaire du certificat de type supplémentaire (STC) responsable de l'aménagement intérieur utilisé pour les services médicaux d'urgence (EMS) dans le S-76, a publié le bulletin de service no SB-EMS76-1. Ce bulletin de service précisait les hélicoptères visés et demandait le remplacement de l'écrou à manchon fileté de l'attache de la ceinture de sécurité par une boucle d'acier. Tous les hélicoptères cités dans le bulletin de service l'ont respecté.
Le présent rapport met un terme à l'enquête du bureau de la sécurité des transports du Canada (BST) sur cet événement. Le Bureau a autorisé la publication du rapport le .