Collision en vol
entre un Beechcraft V35B, N6658R
et un Piper PA-28-140, N23SC
à 6 nm au sud de Warrenton (Virginie)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Renseignements de base
Déroulement du vol
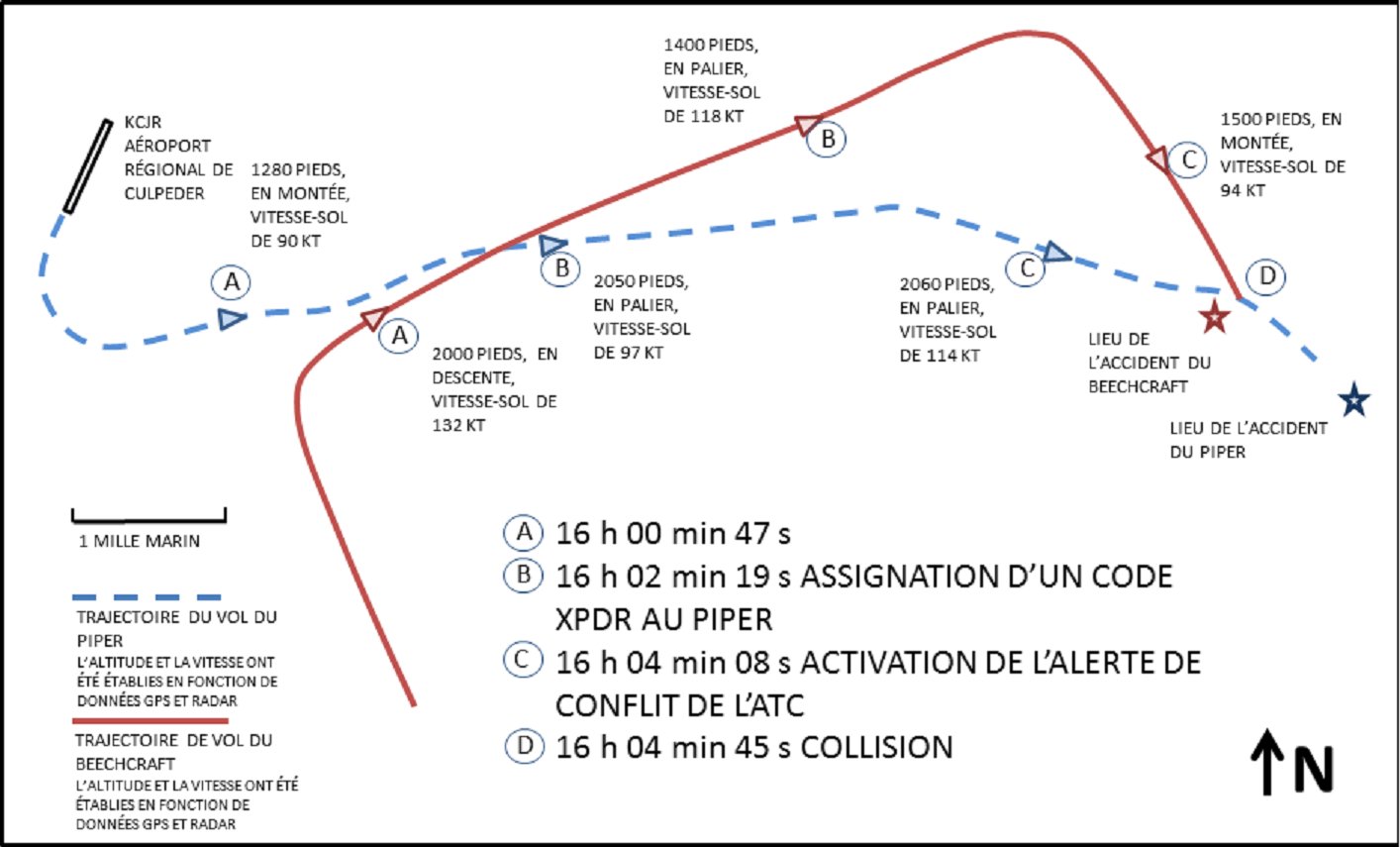
Le pilote du Beechcraft V35B Bonanza (le « Beechcraft ») arrive à l'aéroport Warrenton-Fauquier (KHWY) à 15 h 15Note de bas de page 1 pour prendre à son bord un instructeur afin de procéder à une révision en vol.Note de bas de page 2 Avec l'instructeur de vol accrédité à bord, le Beechcraft amorce son vol à 15 h 45 en direction du sud et monte à 3000 pieds au-dessus du niveau de la mer (ASL). Aucun service de circulation aérienne n'est demandé par les pilotes du Beechcraft, ni n'est requis dans l'espace aérien dans lequel volait l'avion. Les données radar enregistrées indiquent que le Beechcraft transmet sur code de transpondeur 1200.Note de bas de page 3
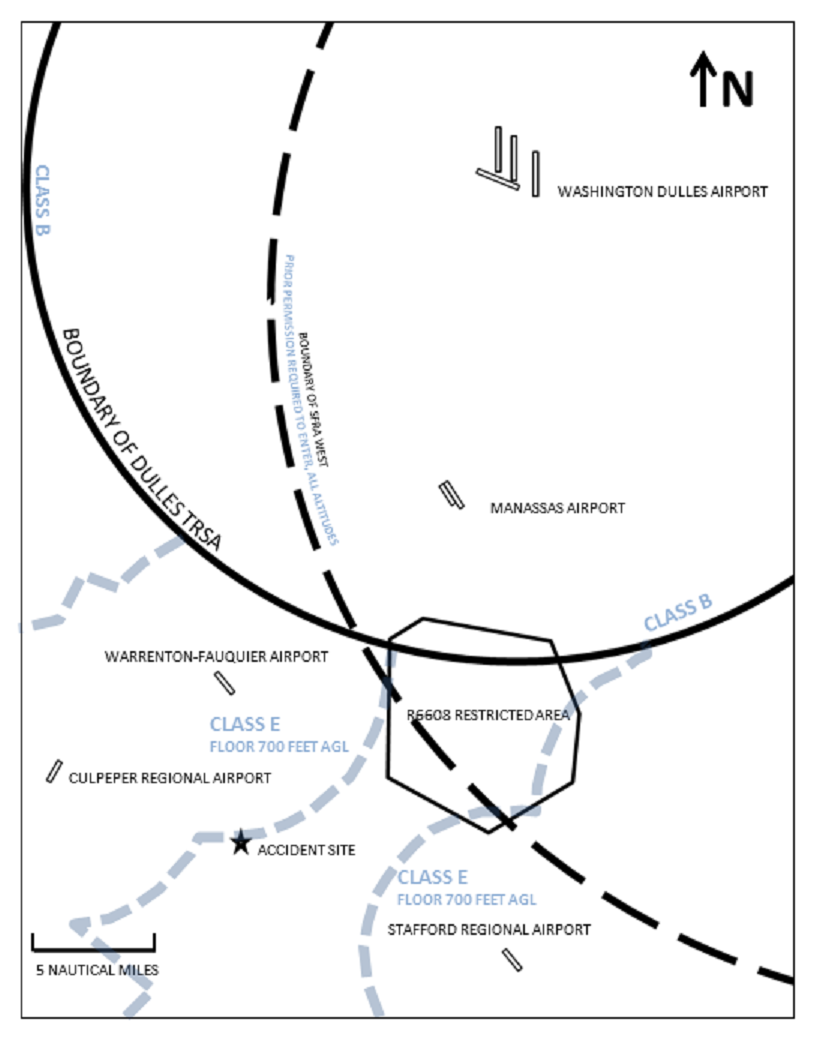
À 15 h 55, le Beechcraft, qui vole en direction nord, se trouve à 13 milles marins (nm) au sud de l'aéroport régional Culpeper (KCJR), à 3000 pieds ASL. À ce moment, le Piper PA-28-140 (le « Piper ») s'envole de l'aéroport KCJR selon les règles de vol à vue (mode VFR) et monte en se dirigeant vers l'est. À 16 h, le Beechcraft amorce une descente (figure 1). Pendant la descente du Beechcraft, le point de rapprochement maximal des 2 aéronefs est de 600 pieds verticalement et de 0,9 nm latéralement. On n'a pas pu établir si l'un des pilotes a vu l'autre avion ou si les 2 avions étaient sur la même fréquence radio.
Notes:
ATC : contrôle de la circulation aérienne
KT : noeud
XPDR : transpondeur
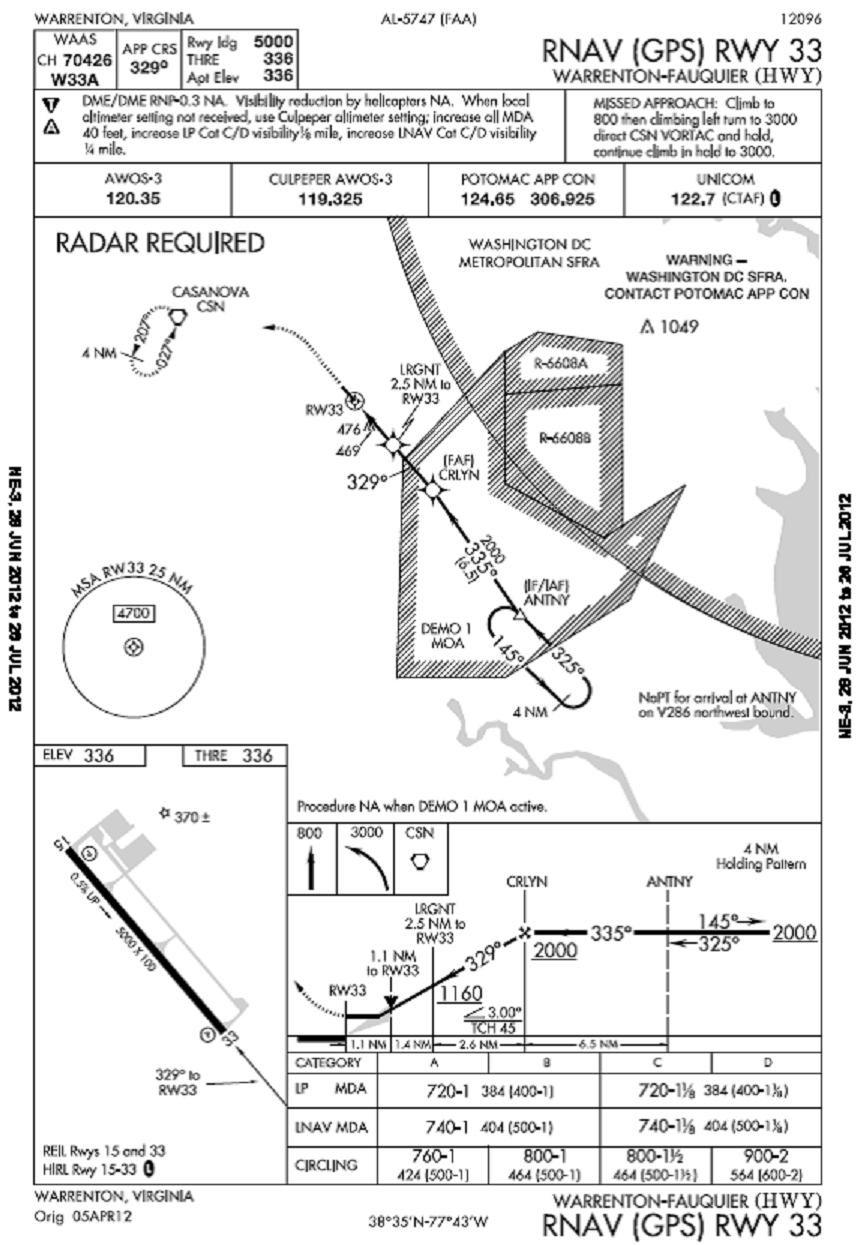
À 16 h 01, le Piper se met en palier à 2000 pieds ASL environ et se dirige vers l'intersection ANTNY (Annexe A - Piste 33 de Warrenton-Fauquier en approche RNAV [GPS]). Le pilote communique avec le centre de contrôle radar terminal (TRACON) pour la zone désignée comme le secteur Barin du centre consolidé TRACON de Potomac (PCT) et demande d'approcher la piste 33 de l'aéroport KHWY en mode de navigation de zone (RNAV) (Annexe B – Espace aérien et aéroports). Le contrôleur du secteur Barin du PCT demande au pilote du Piper de se tenir prêt pendant qu'il s'occupe, avec un autre contrôleur, de 2 aéronefs volant selon les règles de vol aux instruments (mode IFR) au nord de la position du Piper. Les données radar montrent 2 aéronefs volant en mode VFR dans les environs, en plus du Piper et du Beechcraft.
À 16 h 02 min 18 s, le contrôleur du secteur Barin du PCT accuse réception de la demande du pilote du Piper et lui demande d'entrer le code discret 4323 sur son transpondeur. Un bloc de données indiquant l'immatriculation, l'altitude et la vitesse de l'aéronef est donc associé à la cible radar du Piper. Une relève de contrôleurNote de bas de page 4 est ensuite amorcée à 16 h 02 min 34 s. Le contrôleur relevé est interrompu par un appel d'un aéronef, puis reprend l'exposé de relève. L'information transmise au contrôleur de relève comprend le nombre d'arrivées et de départs de l'aéroport international Washington Dulles (KIAD) et de l'aéroport régional Manassas (KHEF), les aéronefs volant en mode IFR qui traversent la piste et la demande du Piper d'effectuer une approche RNAV. L'exposé prend fin à 16 h 03 min 18 s. Lorsque le contrôleur relevé constate que le contrôleur de relève maîtrise la situation, il laisse son poste pour prendre une pause. Le contrôleur de relève demande ensuite au Piper d'activer le dispositif d'identification du transpondeur de l'aéronefNote de bas de page 5et de confirmer l'aéroport et le type d'approche demandés. Le Piper donne suite à cette demande et appuie sur le bouton d'identification du transpondeur. À 16 h 03 min 33 s, le contrôleur ne capte pas l'identification du transpondeur et demande de nouveau au Piper de la lui transmettre, puis tourne son attention vers un autre aéronef à destination de l'aéroport KHEF.
À 16 h 04 min 08 s, une alerte de conflit sonore retentit et une alerte visuelle s'affiche au poste du contrôleur. Le contrôleur de relève entend et voit l'alerte; le contrôleur relevé, ayant quitté son poste, n'a ni entendu ni vu l'alerte. L'alerte de conflit sonore prend fin après environ 5 secondes, mais l'alerte visuelleNote de bas de page 6 demeure affichée. Au moment où l'alerte de conflit retentit, à 16 h 04 min 08 s, le Beechcraft a amorcé une lente montée en direction sud sur une trajectoire qui converge avec celle du Piper. Le Beechcraft se trouve à environ 500 pieds au-dessous du Piper et à 0,9 nm à l'est de celui-ci. Le contrôleur constate l'espacement vertical, établit qu'il n'y a pas de conflit et retourne pour s'assurer que l'espacement sera maintenu entre les 2 aéronefs volant en mode IFR, au nord, sur des routes sécantes. Pendant les 44 secondes qui s'écoulent entre 16 h 04 min 10 s et 16 h 04 min 54 s, le contrôleur communique avec plusieurs aéronefs volant en mode IFR dont la responsabilité lui incombe. Le contrôleur transmet plusieurs instructions au pilote de l'un des 2 aéronefs volant en mode IFR suivant des routes sécantes, dont une demande de mise en palier dans 2 milles et de changement de fréquence. La dernière confirmation de cet avion commence à 16 h 04 min 35 s. À 16 h 04 min 38 s, le contrôleur demande un changement de fréquence à un troisième aéronef volant en mode IFR et reçoit une confirmation à 16 h 04 min 40 s. À 16 h 04 min 43 s, le pilote d'un autre avion (quatrième aéronef volant en mode IFR) syntonise la fréquence. Le contrôleur assigne une altitude, avise le pilote qu'il sera le troisième à atterrir à sa destination et reçoit une confirmation à 16 h 04 min 50 s. Il n'y a aucune alerte de conflit associée aux avions précédents.
À 16 h 04 min 54 s, le contrôleur du secteur Barin du PCT est convaincu que l'espacement sera maintenu entre les avions pilotés en mode IFR. Le contrôleur informe ensuite le pilote du Piper que l'avion a été identifié au radarNote de bas de page 7, qu'il doit monter à 3000 pieds ASL et qu'il y a du trafic dans la zone. Le Piper ne répond pas, car la collision a déjà eu lieu.
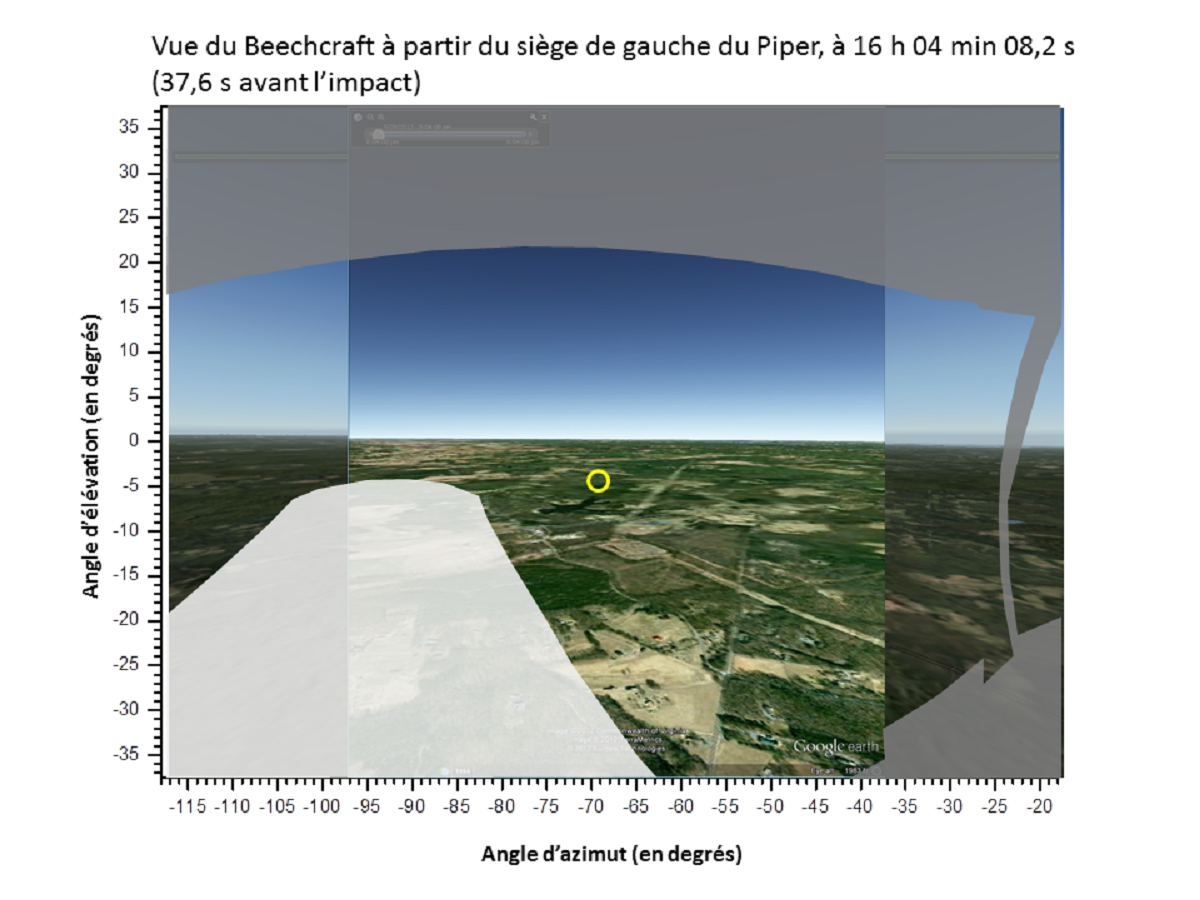
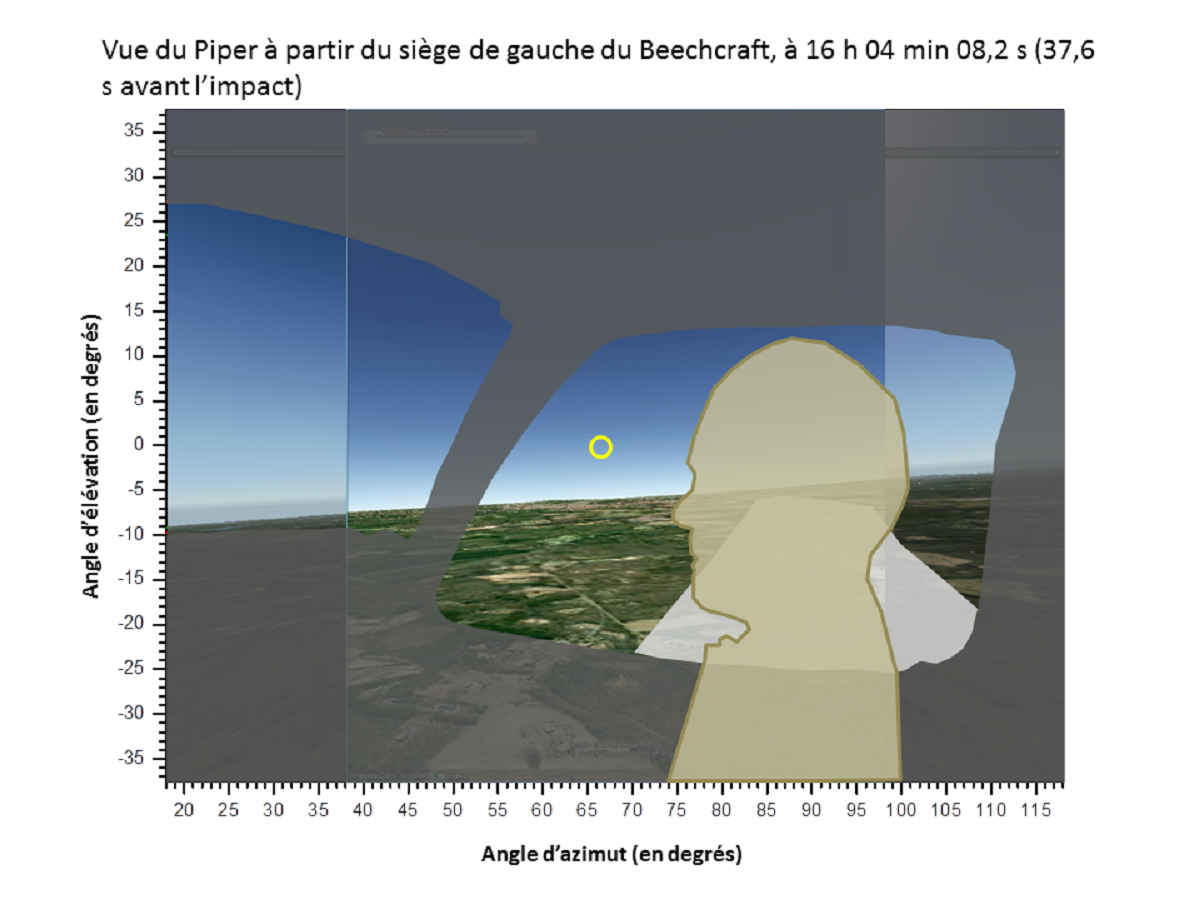
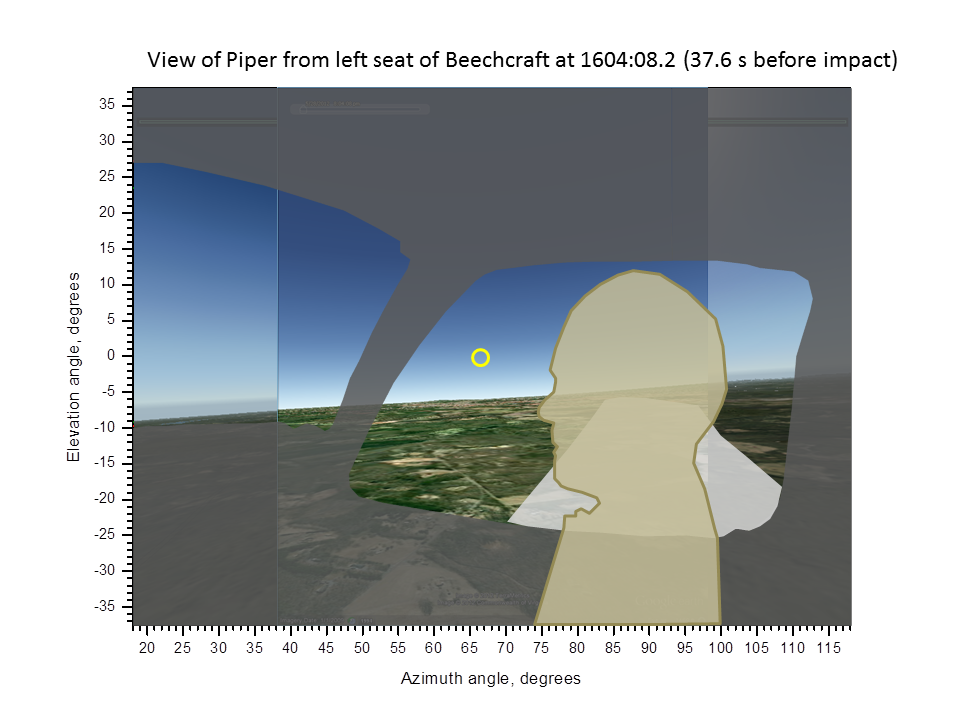
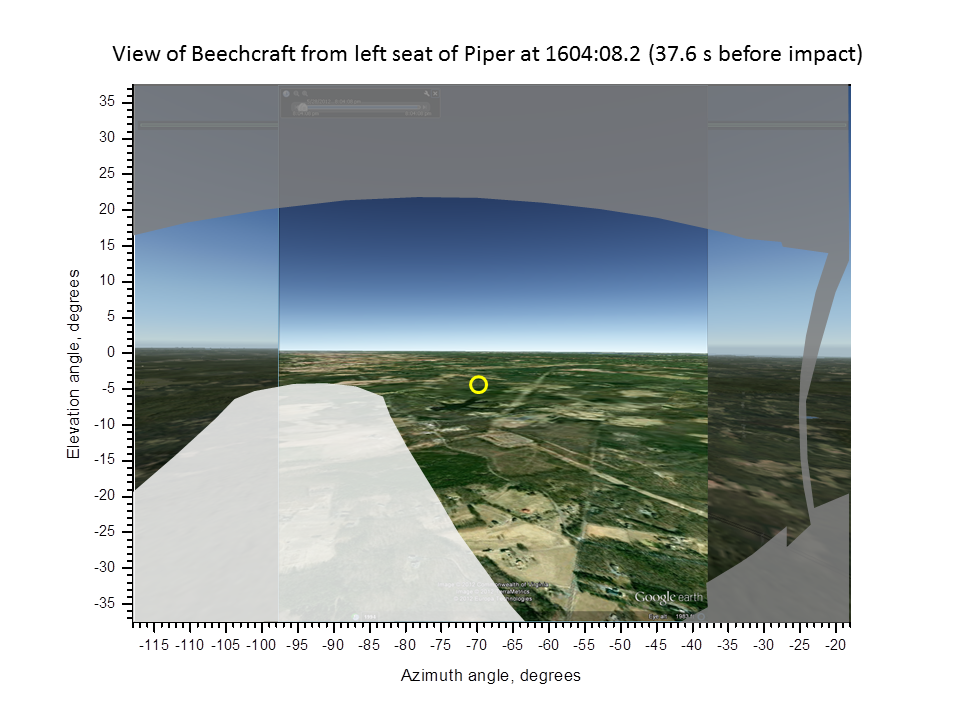
Le Piper et le Beechcraft sont entrés en collision sur une trajectoire convergente de 45° depuis le côté gauche du Piper. Le train d'atterrissage du Beechcraft était rentré et les volets étaient réglés à 15°. L'analyse des champs de vision a révélé qu'il est très probable que les aéronefs étaient visibles l'un à l'autre, c'est-à-dire que leur structure n'aurait pas entravé la visibilité de l'aéronef qui approchait (Annexe C – Champs de vision approximatifs). Le champ de vision du pilote du Beechcraft a pu être bloqué par la tête de l'instructeur, selon la position des sièges et la posture de chacun, mais le champ de vision de l'instructeur aurait été libre. Rien n'indique que l'un ou l'autre des aéronefs aurait tenté une manœuvre pour éviter la collision.
Au moment de la collision, l'hélice du Piper a sectionné le fuselage du Beechcraft juste derrière les sièges de pilotage. Sans empennage ni gouverne d'empennage papillonNote de bas de page 8, le poste de pilotage et les ailes du Beechcraft ont piqué, causant un impact n'offrant aucune chance de survie et un incendie après impact. La gouverne d'empennage papillon de droite et la partie arrière de l'empennage (le cône de queue) du Beechcraft sont demeurées encastrées dans le fuselage du Piper. Le moteur du Piper est tombé en panne et il n'y avait plus d'indication de vitesse. Le pilote a effectué un atterrissage forcé réussi dans un pâturage. Au cours de l'atterrissage, l'avion a glissé dans un chemin étroit aménagé entre des arbres traversant le pâturage. L'aile droite s'est détachée pendant l'impact. Aucun incendie ne s'est déclaré après l'impact.
Le pilote du Piper a subi des blessures pendant la collision avec le Beechcraft et des blessures à la tête au cours de la prise de contact au sol et d'un impact avec un arbre. Ces blessures ont nécessité des soins médicaux. Le Piper n'était pas pourvu de bretelles de sécurité.
Conditions météorologiques
De bonnes conditions météorologiques de vol à vue prévalaient dans la région de Warrenton (Virginie). Le message d'observation météorologique régulière pour l'aviation (METAR) à l'aéroport KHWY émis à 15 h 55 indiquait ce qui suit : vent de 180° vrai (V) à 5 nœuds, visibilité de 10 milles terrestres, ciel dégagé, température de 32 °C, point de rosée de 26 °C et calage altimétrique de 29,95 pouces de mercure. Une observation effectuée 10 minutes après l'accident indiquait essentiellement les mêmes conditions météorologiques, sauf que le vent était de 200°V à 3 nœuds et la température, 31 °C. La hauteur du soleil était de 49° avec un azimut à 258°V. Le relèvement du soleil était de 140° par rapport au Piper et de 093° par rapport au Beechcraft.
Qualifications et expérience des pilotes et des contrôleurs du secteur Barin du centre consolidé TRACON de Potomac
Les dossiers indiquent que le pilote et l'instructeur à bord du Beechcraft, de même que le pilote du Piper, possédaient les licences et les qualifications nécessaires au vol, conformément à la réglementation en vigueur. Les résultats des analyses toxicologiques de tous les pilotes étaient négatifs. Il ressort de l'historique de sommeil et de repos des pilotes que la fatigue n'était pas un facteur en cause.
Le pilote du Beechcraft avait à son actif plus de 1600 heures de vol au total et l'instructeur, un peu plus de 4000 heures. Le pilote du Piper avait à son actif environ 11 100 heures de vol.
Le contrôleur initial et le contrôleur de relève possédaient les certifications et les qualifications requises, conformément aux politiques et à la réglementation en vigueur. Compte tenu de leur horaire de travail et de repos, la fatigue n'a pas été considérée comme un facteur en cause. Le contrôleur initial possédait plus de 30 ans d'expérience en tout, dont les 9 dernières années au PCT. Le contrôleur de relève comptait 21 années d'expérience en tout, dont 4,5 années au PCT.
Aéronefs
Les dossiers indiquent que les 2 aéronefs étaient homologués, équipés et entretenus conformément à la réglementation en vigueur et aux procédures approuvées. Le Piper était un aéronef blanc avec des marquages bleus, et le Beechcraft était blanc avec des marquages rouges. Rien n'indique qu'une défaillance de la cellule ou le mauvais fonctionnement d'un système se seraient produits, que ce soit avant ou pendant le vol. Toutes les gouvernes ont été retrouvées, et tous les dommages constatés sont le résultat de la collision et des forces d'impact. Les 2 avions étaient équipés d'un transpondeur fonctionnel en mode C.
Les enquêteurs ont constaté que l'interrupteur du phare d'atterrissage du Piper était en position d'allumage. Le Piper n'était pourvu d'aucun autre feu de visibilité, tel qu'un feu anticollision. Le Beechcraft était pourvu de feux anticollision. Il n'a pas été possible d'établir la position des interrupteurs des feux extérieurs du Beechcraft en raison des dommages causés par l'incendie après impact.
D'après ce qui a pu être établi, aucun instrument de simulation de conditions météorologiques limitant le champ visuel au cours du vol n'était utilisé par les pilotes ni n'a été trouvé dans l'une ou l'autre des épaves.
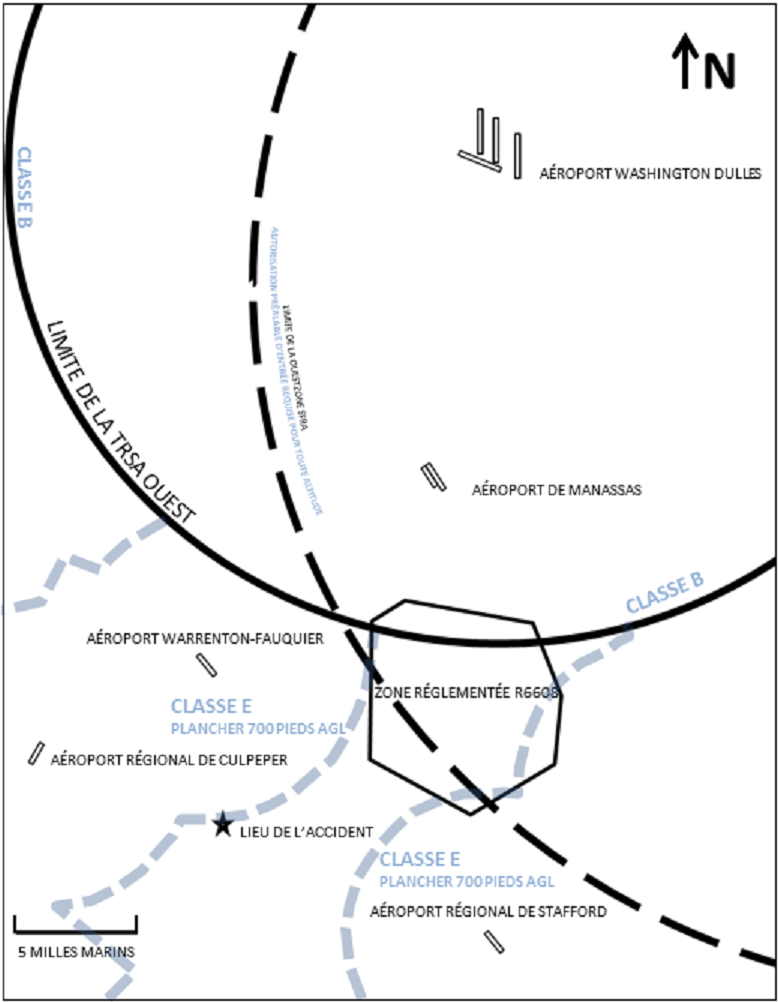
Espace aérien
Les trajectoires de vol des 2 avions se situaient principalement dans un espace aérien de type E propre aux aéroports KCJR et KHWY (Annexe A – Piste 33 de Warrenton-Fauquier en approche RNAV (GPS). Les services de contrôle de la circulation aérienne (ATC) sont fournis aux avions volant en mode IFR dans un espace aérien de type E. Ces services peuvent être fournis aux pilotes volant en mode VFR s'ils en font la demande et que le contrôleur est en mesure de les leur fournir.Note de bas de page 9 Les avions pilotés en mode VFR peuvent voler dans un espace aérien de type E sans que les pilotes aient à posséder une certification spéciale, sans devoir satisfaire à des exigences en matière d'équipement, d'arrivée et de vol direct, et sans détenir une autorisation des services de contrôle de la circulation aérienne. Aucun service d'espacement n'est fourni aux avions volant en mode VFR.Note de bas de page 10
Le manuel d'exploitation du contrôle de la circulation aérienne de la FAA stipule notamment que dans l'espace aérien de type E, le service d'avis de circulation ou de suivi de vol sera fourni dans la mesure du possible, selon la priorité des tâches du contrôleur ou d'autres restrictions (p. ex. les limites du radar, la densité de la circulation, la congestion des fréquences et la charge de travail du contrôleur). Les avis de circulation, qu'ils soient fondés sur des données radar ou non, ne dispensent pas le pilote de sa responsabilité de voir et d'éviter les autres aéronefs. Les pilotes sont avisés qu'il arrive souvent que le contrôleur ne puisse pas fournir des avis de circulation concernant toute la circulation aérienne à proximité de leur aéronef. En d'autres mots, le pilote qui demande ou reçoit un avis de circulation ne doit pas présumer que cet avis concerne tout le trafic aérien.
La section 4-1-15 du Aeronautical Information Manual (Manuel d'information aéronautique) (AIM) de la FAA stipule notamment ce qui suit :
[traduction] « Les pilotes qui reçoivent ce service sont avisés de toutes cibles radar observées à l'écran radar qui pourraient exiger leur attention en raison de la proximité de ces cibles de la position de leur aéronef ou de leur trajectoire de vol prévue. Ce service ne dispense pas le pilote de sa responsabilité d'exercer une vigilance continue afin de voir et d'éviter les autres aéronefsNote de bas de page 11. »
En outre, la section 4-1-16 du AIM stipule ce qui suit :
[traduction] « Une alerte de sécurité sera transmise aux pilotes des aéronefs surveillés par un service de contrôle de la circulation aérienne lorsque le contrôleur constate que ces aéronefs volent à une altitude qui, selon lui, les rapproche dangereusement du relief, d'obstacles ou d'autres aéronefs. La prestation de ce service dépend de la capacité du contrôleur de pouvoir observer une situation de proximité dangereuse par rapport au relief, à des obstacles ou à d'autres aéronefs. L'émission d'une alerte de sécurité n'est pas obligatoire, mais on peut raisonnablement s'attendre à ce qu'elle soit donnée de façon intermittente. Une fois qu'une alerte est émise, il revient entièrement au pilote de décider des mesures à prendre, le cas échéant. Cette procédure doit être utilisée dans des moments critiques lorsque la sécurité d'un aéronef est en jeu. Les situations non critiques doivent être traitées selon les procédures d'alerte de trafic normalesNote de bas de page 12. »
Système d'alerte de conflit
Le système d'ATC vise principalement à prévenir les collisions entre des aéronefs volant dans un espace aérien en particulier et à gérer et à accélérer la circulation aérienne. Le système d'alerte de conflitNote de bas de page 13 a été conçu pour permettre aux contrôleurs de relever les possibilités de collision et de prévenir les collisions entre les aéronefs. Ce système a pour fonction d'établir si des aéronefs sont dangereusement rapprochés ou s'ils sont sur une trajectoire qui les rapprochera dangereusement d'autres aéronefs. Les routes suivies enregistrées par le système radar sont traitées par le système d'alerte de conflit à chaque balayage radar.Note de bas de page 14 Un premier filtre réduit le nombre de paires de routes traitées par le système à un nombre pouvant être accepté par le logiciel.
Lorsque 2 routes passent le premier filtre, elles sont traitées par 4 algorithmes de détection d'alerte de conflit afin de déterminer si elles sont conflictuelles. Pour déterminer si 2 routes sont en conflit, l'altitude et les positions latérales sont traitées séparément. Par exemple, il peut être sécuritaire pour 2 routes de se trouver à la même position latérale et d'être éloignées de 500 pieds en altitude, mais il ne serait pas sécuritaire qu'elles se trouvent à la même altitude et à une distance latérale de 500 pieds.
Pour établir s'il existe une situation de conflit, on évalue d'abord l'intervalle précédant le conflit d'altitude. Le début de cet intervalle correspond au moment auquel il est prévu que les 2 aéronefs seront en conflit d'altitude. L'intervalle précédant le conflit latéral est ensuite établi. Le début de cet intervalle correspond au moment auquel il est prévu que les 2 aéronefs seront en conflit latéral. Si ces 2 intervalles se chevauchent, l'intervalle le plus long détermine le moment à partir duquel les 2 aéronefs se trouveront en conflit d'altitude et en conflit latéral en même temps. Cet intervalle est désigné comme le temps de violation. Lorsque le temps de violation est inférieur ou égal au temps d'anticipationNote de bas de page 15, il y a alors conflit et le contrôleur reçoit une alerte. Le message d'alerte demeure affiché tant qu'il y a un conflit.
Une alerte est émise lorsqu'il est satisfait à tous les paramètres spécifiés. Une alerte sonore unique de 5 secondes retentit alors au poste du contrôleur. Au même moment, les caractères CA (conflict alert/alerte de conflit) clignotent à l'écran du contrôleur sur la première ligne des blocs de données de chacun des aéronefs concernés. Il y a 2 types d'alertes semblables qui peuvent s'afficher, soit une alerte de conflit et une alerte d'intrus en mode C (MCI). La seule différence entre une alerte de conflit et une alerte d'intrus en mode C est que lorsque cette dernière est émise, un code de transpondeur est assigné à 1 seul des 2 aéronefs. Aucun code n'est assigné à l'autre aéronef (code de transpondeur 1200 dans ce cas). Lorsqu'il s'agit d'une alerte de conflit, les 2 aéronefs reçoivent un code de transpondeur. Le traitement logiciel et l'affichage sont les mêmes, qu'un code de transpondeur soit assigné à 1 aéronef ou aux 2 aéronefs. Des paramètres d'adaptation, tels que des filtres géographiques ou la capacité de manœuvre des aéronefs, peuvent également être appliqués afin de déterminer si une alerte doit être émise ou non.
Système d'alerte de conflit au centre consolidé TRACON de Potomac
Le PCT ne comporte aucune exception approuvée pour des paramètres d'adaptation du système d'alerte de conflit qui permettrait de supprimer des alertes de conflit. Actuellement, il n'y a aucune région de suppression d'alerte d'intrus en mode C au PCT. L'endroit où s'est produit l'accident ne se trouve pas dans une région comportant des paramètres d'adaptation. Par conséquent, le traitement de l'alerte de conflit pour ces 2 aéronefs aurait été le même que celui du PCT dans n'importe quel autre centre TRACON. Le personnel du PCT effectue une vérification sonore quotidienne de chaque écran et une vérification mensuelle du système. L'alerte de conflit sonore a également été vérifiée après l'accident; elle fonctionnait conformément aux paramètres opérationnels spécifiés. L'alerte de conflit sonore est conçue pour retentir pendant 5 secondes.
L'alerte d'intrus en mode C pour le Piper et le Beechcraft s'est affichée pour la première fois à 16 h 04 min 08 s, pendant 51 secondes.Note de bas de page 16 Une alerte sonore a retenti au poste du contrôleur du secteur Barin du PCT lorsque l'alerte s'est affichée pour la première fois. Elle a retenti pendant environ 5 secondes, puis a cessé, comme prévu. L'alerte de conflit s'est d'abord affichée lorsque les 2 avions étaient à 500 pieds verticalement l'un de l'autre, ce qui constitue l'espacement minimal accepté entre 2 avions volant en mode VFR pendant au moins 2 mises à jour des données radar.Note de bas de page 17 Le contrôleur du secteur Barin du PCT a vu l'alerte affichée, a jugé qu'il n'y avait pas de conflit, puis a tourné de nouveau son attention vers 2 avions au nord volant en mode IFR. Aucune autre intervention n'a été effectuée à la suite de cette alerte. Avant la collision, le contrôleur du secteur Barin du PCT n'a pas transmis d'alerte de sécurité ni d'avis de circulationNote de bas de page 18 et n'a pas non plus transmis de message verbal pour aviser le Piper qu'une alerte de conflit était affichée pour cet appareil. Après s'être occupé de la circulation des avions volant en mode IFR, le contrôleur a tourné de nouveau son attention vers le Piper et a envoyé un avis de circulation au pilote. Toutefois, la collision avait déjà eu lieu.
Procédures de contrôle de la circulation aérienne de la Federal Aviation Administration - Alertes de sécurité
L'ordre JO 7110.65U de la FAA comprend les procédures suivantes pour aviser les aéronefs de situations pouvant compromettre la sécurité :
[traduction] Transmettez une alerte de sécurité à un aéronef si vous constatez qu'il est dans une position ou à une altitude qui, selon vous, le rapproche dangereusement du relief, d'un obstacle ou d'un autre aéronef. Lorsque le pilote vous avise qu'il est intervenu pour régler le problème, vous pouvez cesser de lui transmettre des alertes. Ne présumez pas, parce que la responsabilité de l'aéronef incombe à une autre personne, que la situation dangereuse a été constatée et qu'une alerte de sécurité a été émise. Avisez le contrôleur approprié.
REMARQUE
- L'émission d'une alerte de sécurité est la priorité ultime (voir le paragraphe 2−1−2, qui traite de la priorité des tâches) lorsque le contrôleur observe et reconnaît une situation de proximité dangereuse du relief, d'un obstacle ou d'un autre aéronef. Des facteurs comme la charge de travail du contrôleur, la densité de la circulation, la qualité et les limites du système radar, ainsi que le temps dont on dispose pour réagir peuvent notamment être pris en compte pour déterminer s'il est raisonnable que le contrôleur puisse observer et reconnaître de telles situations. Bien que le contrôleur ne puisse pas voir immédiatement toutes les situations qui exigent d'émettre une alerte de sécurité, il doit demeurer vigilant afin de relever de telles situations et d'émettre une alerte de sécurité lorsqu'il les constate.
- Les situations de proximité dangereuse peuvent être reconnues au moyen (…)
d'afficheurs automatiques d'altitude, d'alertes de conflit ou d'alertes d'intrus en mode C, (…) ou de signalements des pilotes.Note de bas de page 19
On y stipule également ce qui suit :
[traduction]
- Alertes de conflit d'aéronefs ou d'intrus en mode C.
Transmettez immédiatement une alerte à un aéronef lorsque vous constatez qu'il y a un autre aéronef à une altitude qui, selon vous, les rapproche dangereusement. S'il vous est possible de le faire, proposez au pilote un plan d'action.Note de bas de page 20
La section 2-1-2 de l'ordre JO 7110.65U de la FAA stipule notamment ce qui suit :
[traduction]
- La plus grande priorité est l'espacement des aéronefs et l'émission des alertes de sécurité conformément au présent ordre. Il faut faire preuve de jugement pour établir les priorités parmi les autres mesures énoncées dans le présent ordre selon ce qu'exige la situation en cours…
REMARQUE
Comme il y a de nombreuses variables en cause, il serait pratiquement impossible de dresser une liste normative des tâches prioritaires qui s'appliquerait uniformément à toutes les situations envisageables. Chaque situation doit être évaluée à sa juste valeur et, lorsque plus d'une action est requise, les contrôleurs doivent faire preuve de jugement en se fondant sur les faits et les situations qu'ils connaissent. L'intervention la plus importante sur le plan de la sécurité est celle qui doit être effectuée la première.Note de bas de page 21
La section 2-1-21, Traffic Advisories (Avis de circulation) stipule notamment ce qui suit :
[traduction] À moins qu'un aéronef vole dans un espace aérien de type A ou que le pilote demande une dérogation, transmettez sur votre fréquence un avis de circulation à tous les aéronefs (volant en mode IFR ou VFR) lorsque, selon vous, leur proximité peut réduire l'espacement à un espacement inférieur au minimum requis. Lorsqu'aucun espacement minimal n'est requis, comme pour les aéronefs volant en mode VFR à l'extérieur d'un espace aérien de type B ou C ou d'une zone de service de contrôle radar terminal, transmettez sur votre fréquence un avis de circulation aux aéronefs dont la proximité, selon vous, le justifie.Note de bas de page 22
Les contrôleurs du PCT ont reçu une formation initiale sur le système d'alerte de conflit, en ce qui concerne les mesures à prendre en cas d'alerte de conflit. Cette formation portait notamment sur la façon d'aviser les pilotes qu'une situation d'alerte a été constatée. Les contrôleurs n'ont pas été formés sur les paramètres ni sur les seuils qui peuvent déclencher une alerte de conflit, ni, plus particulièrement, sur les conditions relatives aux trajectoires de vol qui doivent être remplies pour que le système déclenche une alerte. Les exposés sur les notions de base, la formation d'appoint annuelle et un module d'enseignement automatisé conçus pour les contrôleurs comportaient de courtes présentations sur les alertes de sécurité. Le module d'enseignement automatisé comprend plusieurs scénarios de situations où le contrôleur doit choisir la phraséologie appropriée pour une situation donnée. Ce module traite des alertes de sécurité, des avis de circulation et des procédures en cas de cibles convergentes.
Recommandations du National Transportation Safety Board sur les tâches associées aux alertes de conflit
En réponse à 10 impacts sans perte de contrôle (CFIT) et à 1 collision en vol, le National Transportation Safety Board (NTSB) a formulé, en 2006, 4 recommandations de sécurité (A-06-44 à 47, datées du 12 juillet 2006) concernant les tâches associées aux alertes de conflit et aux avis sur l'altitude sécuritaire minimale. La lettre contenant les recommandations soulignait ce qui suit à propos des alertes de conflit :
[traduction] Dans chacun des accidents mentionnés, le logiciel d'avis sur l'altitude sécuritaire minimale et d'alerte de conflit a fonctionné comme prévu et a tenté d'alerter les contrôleurs à propos des risques détectés. Toutefois, aucune des alertes n'a permis une intervention opportune du système de contrôle de la circulation aérienne, car soit les contrôleurs étaient au fait de l'alerte, mais ne sont pas intervenus, soit ils n'étaient pas au fait de la situation dangereuse, malgré le déclenchement des alertes. (…) Le manque d'efficacité de ces systèmes d'alerte, qui n'ont pas permis de capter l'attention de contrôleurs apparemment consciencieux et attentifs, préoccupe le NTSB.
Le NTSB constate qu'il est avantageux d'émettre des alertes de conflit visuelles et sonores, car le système de contrôle de la circulation aérienne exige souvent des contrôleurs qu'ils effectuent de nombreuses tâches secondaires qui ne nécessitent pas de consulter constamment leurs écrans. La conception actuelle des systèmes d'avis sur l'altitude sécuritaire minimale et d'alerte de conflit n'assure pas le signalement redondant efficace d'une situation d'alerte, car l'alerte sonore du système s'arrête automatiquement après quelques secondes. En outre, la conception actuelle de ces systèmes ne donne pas l'assurance qu'un contrôleur reconnaîtra et confirmera l'alerte.
L'ordre 7110.65 de la FAA ne fait aucune distinction entre les vols en modes VFR et IFR, en ce qui concerne l'émission d'alertes de sécurité lorsque des dangers observés menacent les vols. Les contrôleurs doivent faire preuve de jugement et demeurer vigilants afin de repérer les situations mettant en danger des aéronefs. Lorsque de telles situations sont constatées, l'émission d'une alerte de sécurité est la priorité absolue.
Le NTSB a donc formulé, à l'intention de la FAA, la recommandation suivante (A-06-44) :
[traduction] Revoyez la conception des systèmes d'avis sur l'altitude sécuritaire minimale et d'alerte de conflit, ainsi que les méthodes d'alerte, de manière à ce qu'ils puissent capter efficacement l'attention des contrôleurs afin qu'ils s'occupent des situations potentiellement dangereuses détectées par les systèmes. Apportez des changements logiciels à toutes les installations de contrôle de la circulation aérienne afin que des avis sur l'altitude sécuritaire minimale et des alertes de conflit puissent être émis.
En réponse à la recommandation du NTSB, la FAA a commandé un rapport de recherche. Ce rapport concluait notamment ce qui suit :
[traduction] (…) le nombre élevé de fausses alertes ne semble pas réduire la vigilance à l'égard des alertes de conflit émises par les systèmes de contrôle de la circulation aérienne (…) il n'y a aucun besoin de modifier de façon substantielle les algorithmes d'alerte de conflit, mais le système d'alerte de conflit pourrait être modifié de façon à pouvoir traiter les conflits difficiles à visualiser.Note de bas de page 23
Le NTSB a considéré comme ouverte et satisfaisanteNote de bas de page 24 l'intervention proposée par la FAA à la suite de la recommandation A-06-44.
Limites du principe voir et éviter
Lorsque les conditions météorologiques le permettent, peu importe si un vol est effectué selon les règles de vol aux instruments ou les règles de vol à vue, toute personne pilotant un aéronef doit demeurer vigilante afin de voir et d'éviter les autres aéronefs.Note de bas de page 25
Le principe voir et éviter est fondé sur la surveillance visuelle active, et la capacité de repérer des aéronefs en conflit et de prendre les mesures appropriées pour les éviter. Les limites à la visibilité, de même que des activités telles que la surveillance des instruments, les communications radio, les exercices de formation en vol, les interactions avec un instructeur, la navigation ou les approches simulées aux instruments peuvent réduire la capacité de voir et d'éviter. Dans de tels cas, l'équipage peut ne pas porter toute son attention sur la surveillance visuelle active de la circulation aérienne.
En 1991, l'Australian Transport Safety Bureau a produit un rapportNote de bas de page 26 offrant un aperçu des principaux facteurs qui limitent la capacité de voir et d'éviter pour prévenir les collisions en vol.
Ce rapport contenait le résumé ci-après, qui reflète les limites physiologiques connues de l'œil humain :
[traduction] La charge de travail dans le poste de pilotage et d'autres facteurs réduisent le temps que les pilotes passent à surveiller la circulation aérienne. Toutefois, même quand les pilotes surveillent la circulation aérienne, rien ne garantit qu'ils apercevront les autres aéronefs. Le pare-brise de la plupart des postes de pilotage limite de façon importante le champ visuel du pilote. Le champ visuel est souvent réduit par des obstructions, telles que les montants des fenêtres, qui bloquent complètement certaines parties du champ visuel ou ne permettent de voir que d'un seul œil. Les montants des fenêtres ainsi que les rayures et la saleté sur le pare-brise peuvent créer des « pièges focaux » et amener les pilotes à réduire involontairement la distance de leur champ visuel lorsqu'ils surveillent la circulation aérienne. L'éblouissement direct du soleil et le reflet voilant du pare-brise peuvent effectivement obstruer certaines parties du champ visuel.
Pour assurer la surveillance visuelle, il faut déplacer le regard afin d'amener successivement des parties du champ visuel dans la zone réduite du centre de l'œil où la vision est nette. Cet exercice n'est souvent pas effectué systématiquement et de grandes parties du champ visuel sont ignorées. Une surveillance visuelle complète et systématique n'est toutefois pas la solution, car dans la plupart des cas, il faudrait y consacrer trop de temps.
En raison des limites physiologiques de l'œil humain, même une surveillance visuelle des plus consciencieuses ne permettra pas toujours de repérer d'autres aéronefs. Une partie importante du champ visuel peut être obstruée par la tache aveugle de l'œil; les yeux peuvent focaliser à une distance inappropriée en raison des facteurs d'obstruction décrits précédemment ou de la myopie de l'espace vide, phénomène selon lequel les yeux, en l'absence d'indices visuels, focalisent à une distance fixe d'environ 0,5 mètre. Il est peu probable qu'un objet dont la taille est sous le seuil d'acuité visuelle soit repéré, et encore moins probable qu'il soit reconnu comme un aéronef qui s'approche.
Le champ visuel fonctionnel du pilote se rétrécit dans des situations de stress ou de charge de travail accrue. La vision tubulaire qui en résulte réduit la probabilité de repérer un aéronef qui s'approche dans le champ visuel périphérique.
L'œil humain détecte mieux les cibles mobiles que les cibles stationnaires; toutefois, dans la plupart des cas, un aéronef sur une trajectoire de collision se présente comme une cible stationnaire dans le champ visuel du pilote. Le contraste entre un aéronef et l'arrière-plan peut être réduit de façon importante par des facteurs atmosphériques, même dans des conditions de bonne visibilité.
Souvent, un aéronef qui approche occupera un très petit angle visuel jusqu'à ce qu'il soit tout près d'entrer en collision. De plus, les arrière-plans complexes, tels que le paysage terrestre ou les nuages, créent une « interaction de contour », effet visuel qui réduit la capacité de reconnaître facilement un aéronef. Cela se produit lorsque les contours de l'arrière-plan se confondent avec la forme de l'aéronef pour produire une image moins nette.
Même lorsqu'un aéronef qui approche est repéré, rien ne garantit qu'une manœuvre d'évitement réussira. Reconnaître une menace de collision et réagir prennent beaucoup de temps, et une manœuvre d'évitement inappropriée peut accroître les risques de collision au lieu de les réduire.
En raison de ses nombreuses limites, il ne faut pas s'attendre à ce que le principe voir et éviter joue un rôle important dans les systèmes de contrôle de la circulation aérienne futurs.
Nombre de ces questions ont été abordées dans un article sur la recherche intitulé Midair Collisions: Limitations of the See-and-Avoid Concept in Civil Aviation (Collisions en vol : Limites du concept voir et éviter dans l'aviation civile).Note de bas de page 27 Cet article mentionne notamment ce qui suit :
[traduction] Finalement, le concept voir et éviter induit en erreur les pilotes et les contrôleurs en les incitant à trop se fier à la surveillance visuelle sans tenir compte des limites physiques et psychologiques de ce concept et des stratégies de réduction des risques. Bien que la surveillance visuelle soit nécessaire pour prévenir les collisions en vol, surtout dans le cas d'aéronefs qui volent à basse vitesse à proximité et ne sont pas encore dans une trajectoire de collision, elle ne suffit pas. Les stratégies possibles de réduction des risques comprennent notamment :
- la formation des pilotes et des contrôleurs aériens sur les limites physiques et comportementales du concept voir et éviter;
- dotation d'alertes de sécurité sur les systèmes de contrôle de la circulation aérienne et recommandations à l'égard de toutes les situations de conflit;
- dotation de transpondeurs alticodeurs fiables continuellement en fonction dans tous les aéronefs;
- établissement, pour tous les aéroports, de procédures normalisées d'entrée dans le circuit et de procédures de sortie connexes;
- établissement de procédures de communication et d'indication de position normalisées dans les circuits de circulation de tous les aéroports;
- établissement de procédures d'indication de position et de cap normalisées dans les aires d'arrivée et de départ, les corridors, les zones panoramiques et les autres aires à haute densité;
- dotation en technologies d'évitement des collisions abordables et fiables dans tous les aéronefs d'aviation générale.
La visibilité des aéronefs doit également être considérée lorsqu'on examine la capacité de voir et d'éviter. Certaines combinaisons de couleurs et certains motifs peuvent être avantageux dans certaines conditions, mais aucune combinaison ni aucun motif ne présente un avantage absolu.Note de bas de page 28Note de bas de page 29 Note de bas de page 30 Les feux anticollision et les feux à éclats ne sont pas très efficaces le jour par temps ensoleilléNote de bas de page 31 et les phares d'atterrissage ne sont efficaces que lorsqu'un aéronef volant en sens inverse se trouve directement dans le faisceau lumineux.Note de bas de page 32
Le rapport d'enquête aéronautique A06O0206 du Bureau de la sécurité des transports du Canada indiquait que le risque de collision en vol est élevé dans les espaces aériens encombrés lorsque les pilotes ne sont pas avisés de la présence d'autres aéronefs et qu'ils se fient uniquement à leur capacité de voir et d'éviter. Un moyen technologique permettant d'aviser les pilotes de tout conflit potentiel pourrait compléter l'application du principe voir et éviter pour l'évitement des collisions en vol. Le rapport fait également état de préoccupations liées à la sécurité, dont ce qui suit :
(…) tant que la mise en œuvre de solutions technologiques comme des systèmes de protection contre les collisions ne sera pas obligatoire, il subsistera un risque important d'abordage entre les aéronefs en vol VFR dans les espaces canadiens très fréquentés et à haute densité de trafic. Le Bureau signale que le risque de collision augmentera du fait que le trafic continue de croître et que l'application du principe voir et éviter constitue le principal moyen de protection. En outre, le Bureau reconnaît que l'innovation technologique offre des solutions potentielles viables et peu coûteuses.
Systèmes d'évitement des collisions aériennes
Ni l'un ni l'autre des aéronefs n'était équipé d'un quelconque système d'évitement des collisions ni n'était tenu de l'être. Plusieurs systèmes de ce type sont utilisés aujourd'hui; leurs caractéristiques sont résumées à l'Annexe D – Systèmes d'évitement des collisions aériennes.
Un système de ce type, le service d'information sur le trafic (TIS), a été examiné afin d'établir si une alerte aurait pu être déclenchée en temps opportun, si l'un des avions en avait été équipé. La figure 2 et la figure 3 représentent des écrans d'une simulation du NTSB de messages d'un TIS qui auraient pu être envoyés au Piper et au Beechcraft s'ils avaient été équipés de l'équipement avionique requis pour recevoir et afficher ces messages.
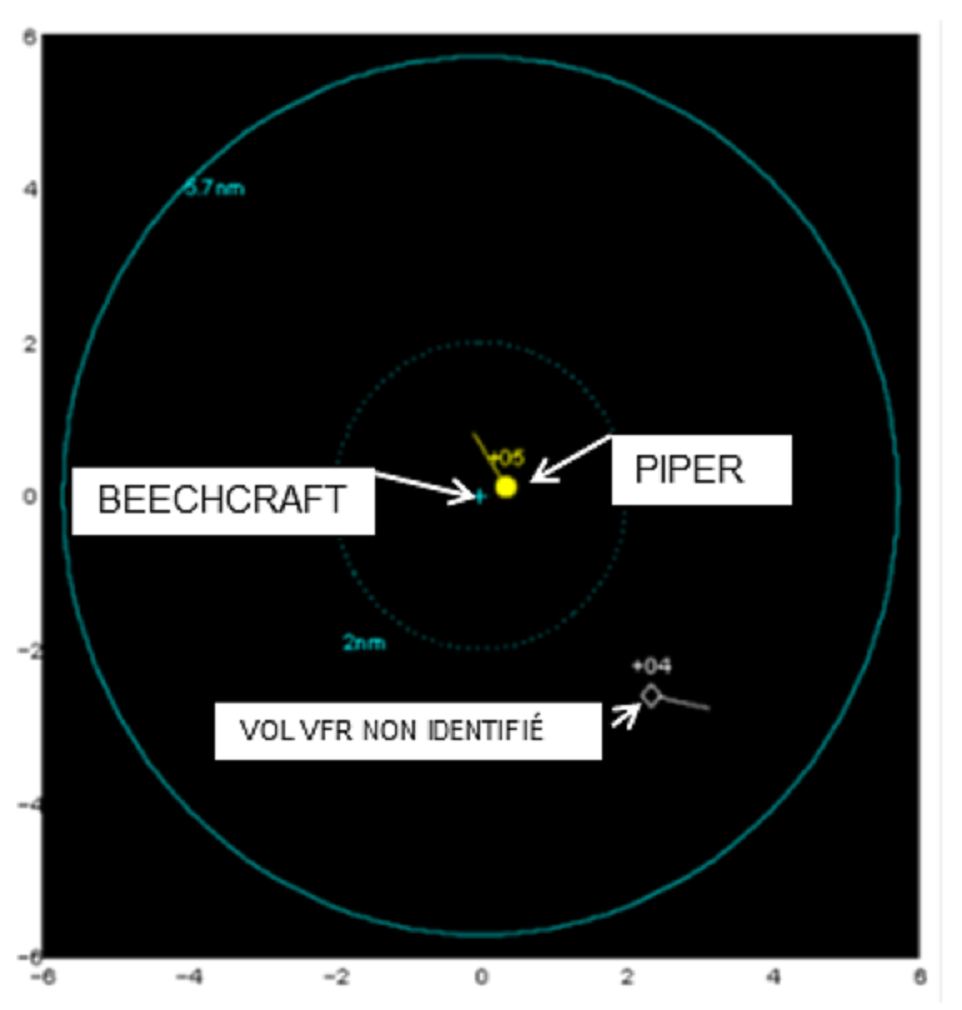
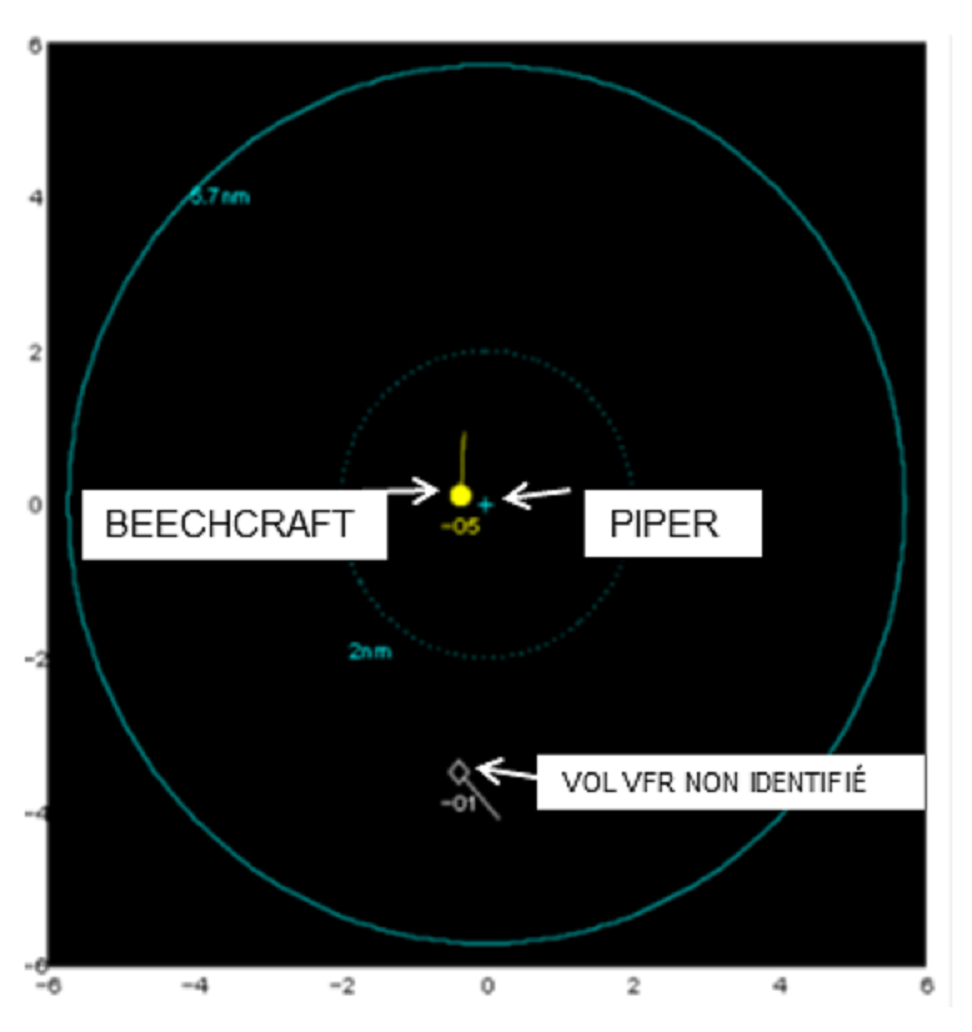
Ces écrans simulés sont fondés sur des échos radar bruts, et non sur les échos lissés ou filtrés utilisés par le système TIS de la FAA. Cette simulation est néanmoins représentative sur le plan du type d'alertes qui auraient pu être transmises aux 2 avions et sur celui du moment de leur déclenchement.
Il convient de noter que lorsqu'une alerte de proximitéNote de bas de page 33 passe à une alerte de traficNote de bas de page 34, une alerte de trafic sonore est également déclenchée. Une alerte de trafic montrant le Beechcraft 500 pieds au-dessous, entre 9 et 10 h et à moins de 1 nm, aurait pu être transmise au Piper à 16 h 04 min 17 s. Le Beechcraft aurait pu recevoir une alerte de trafic à 16 h 04 min 13 s, montrant le Piper 500 pieds au-dessus, entre 2 et 3 h, et à moins de 1 nm. Comme la collision s'est produite vers 16 h 04 min 45 s, les alertes sonores auraient retenti 30 secondes avant l'impact.
Techniques d'enquête - Angles d'azimut et d'élévation des structures des avions relevés par balayages laser
Pour l'analyse des champs de vision (rapport de Laboratoire du BST LP119-2012), les angles d'azimut et d'élévation des bords de fenêtres et des ailes du Piper et du Beechcraft ont été déterminés à partir des dimensions intérieures et extérieures de ces avions. Ces dimensions ont été mesurées avec le scanneur laser FARONote de bas de page 35 du NTSB, avec l'assistance des enquêteurs du NTSB. Le scanneur laser produit des nuages de pointsNote de bas de page 36 générés par la réflexion de la lumière laser sur les objets dans la trajectoire du laser alors que le scanneur effectue un balayage de 360° en azimut et d'environ 150° en élévation. Les coordonnées tridimensionnelles de chaque point du nuage sont connues et les coordonnées des points de plusieurs balayages effectués par le scanneur placé à différents endroits sont combinées par le logiciel du scanneur pour produire un système de coordonnées commun. On peut établir la géométrie extérieure et intérieure de l'avion en plaçant le scanneur dans suffisamment d'endroits différents pour qu'il puisse numériser toutes les parties de l'avion.
Dans cette étude, le balayage de l'extérieur des avions a été effectué à partir de 8 endroits, et le balayage de l'intérieur des avions a été réalisé à partir des sièges du pilote et du copilote. Le logiciel du scanneur a ensuite permis, avec les balayages de l'intérieur, de relever les points définissant le contour des fenêtres des postes de pilotage. Les balayages de l'extérieur ont servi à établir les coordonnées des ailes de gauche et de droite. Les coordonnées de ces points ont été exportées depuis le logiciel du scanneur vers un fichier Microsoft Excel. Dans le fichier Excel, ces coordonnées ont été converties en trièdre avion, puis en angles d'azimut et d'élévation depuis la position des yeux des pilotes.
Protocole d'entente entre le National Transportation Safety Board et le Bureau de la sécurité des transports du Canada
Aux termes d'un protocole d'entente conclu avec le NTSB, le BST a été désigné pour enquêter sur cet accident dans le but d'en établir les causes et les facteurs contributifs et de relever les lacunes de sécurité.
Le protocole d'entente stipulait que ces organismes se conformeraient aux normes relatives aux enquêtes sur les accidents et les accidents graves, établies dans l'Annexe 13 à la Convention relative à l'aviation civile internationale - Enquêtes sur les accidents et incidents d'aviation. Il stipulait en outre que l'enquête devait être menée conformément à la Loi sur le Bureau canadien d'enquête sur les accidents de transport et de la sécurité des transports et aux politiques et pratiques administratives normalisées du BST.
Un enquêteur du NTSB a été nommé à titre de représentant accrédité des États-Unis pour l'enquête du BST en vertu du chapitre 5 de l'Annexe 13 de la Convention relative à l'aviation civile internationale. Le représentant accrédité devait constituer le seul point de contact entre le NTSB et le BST aux fins de cette enquête. Aucun autre employé du NTSB, ni membre du NTSB ne devait participer à quelque aspect que ce soit de cette enquête, sauf s'il s'agissait de fournir, par l'entremise du représentant accrédité, des renseignements demandés par l'enquêteur désigné du BST.
Rapports du Laboratoire du BST
Le rapport du Laboratoire du BST suivant a été rédigé :
- LP119-2012 – Field of View Analysis (Analyse des champs de vision)
Analyse
Compte tenu des événements qui ont précédé la collision en vol, la présente analyse visera principalement à expliquer pourquoi les 2 aéronefs volant en mode VFR n'ont pu éviter d'entrer en collision en se fiant au principe voir et éviter et pourquoi, bien que le contrôleur ait reçu une alerte de conflit, aucune alerte de sécurité n'a été émise avant la collision.
L'espacement à maintenir entre les aéronefs volant en mode VFR repose sur le principe que les pilotes seront en mesure de voir et d'éviter les autres aéronefs. Les limites de ce principe ne permettent toutefois pas toujours aux pilotes d'y parvenir. Les 2 aéronefs ont maintenu une trajectoire de collision pendant environ 37 secondes au cours desquelles aucun mouvement angulaire relatif n'aurait pu aider les pilotes à repérer l'autre appareil dans leur champ de vision périphérique. Les pilotes des 2 aéronefs étaient occupés par des activités qui auraient réduit le temps consacré à la surveillance de la circulation. Le pilote du Piper préparait une approche simulée aux instruments et celui du Beechcraft effectuait plusieurs exercices dans le cadre d'une révision en vol. Leur position relative était telle qu'en s'approchant, ces aéronefs ne se trouvaient dans le champ visuel avant d'aucun des pilotes. Si l'un des pilotes avait regardé dans la direction générale de la trajectoire convergente de l'autre aéronef, ce champ de vision relativement grand aurait alors été obstrué par la tache aveugle caractéristique de l'oeil, ce qui aurait pu facilement empêcher de voir la petite cible que constituait cet aéronef. En raison des trajectoires convergentes, peu de mouvement relatif de l'un ou de l'autre des avions, voir aucun, n'aurait été perceptible à l'œil humain. Par conséquent, il aurait été difficile de repérer l'autre avion. Du point de vue du pilote du Piper, le Beechcraft s'approchait depuis le bas et le paysage terrestre aurait constitué un arrière-plan complexe, ce qui rendait plus difficile de repérer l'autre avion. L'enquête n'a pas permis d'établir dans quelle mesure les pilotes surveillaient activement le ciel pour repérer d'autres aéronefs. Les lacunes du principe voir et éviter sont amplifiées lorsque des aéronefs volent dans un espace aérien à forte densité de circulation, comme c'était le cas dans cet accident.
Les systèmes du contrôle de la circulation aérienne (ATC) comportent des technologies que les contrôleurs peuvent utiliser pour alerter les pilotes des risques de conflit avec d'autres aéronefs. Dans cet accident, lorsque l'alerte de conflit a été déclenchée, les 2 aéronefs se trouvaient à 500 pieds verticalement l'un de l'autre, ce qui constitue l'espacement acceptable entre 2 aéronefs volant en mode VFR. Tout d'abord, il n'y a eu aucune indication que l'un ou l'autre des avions montait ou descendait. L'alerte de conflit initiale et la première mise à jour des 2 cibles d'aéronef, 5 secondes plus tard, montraient que les aéronefs maintenaient un espacement vertical de 500 pieds. Le contrôleur a jugé qu'il n'y avait pas de conflit entre les 2 avions volant en mode VFR et n'a donc pas émis immédiatement une alerte de sécurité.
Il aurait fallu que l'ATC surveille les aéronefs pendant 10 à 15 secondes pour déterminer s'il y avait risque de collision. Dans ce cas, une alerte de conflit a été déclenchée lorsque les avions étaient à moins de 600 pieds verticalement l'un de l'autre, et l'algorithme du logiciel a établi que les 2 aéronefs se trouveraient sur des trajectoires convergentes s'ils continuaient à voler à la même vitesse et dans la même direction. Lorsqu'un contrôleur détermine par l'observation qu'il n'y a pas de danger immédiat pour 2 aéronefs, aucune intervention n'est requise.
Le contrôleur a également constaté que l'espacement entre 2 aéronefs volant en mode IFR dont la responsabilité lui incombait n'était pas assuré et qu'une surveillance accrue était requise. Le contrôleur a donc tourné son attention vers ces 2 aéronefs et non vers les aéronefs volant en mode VFR, qui n'avaient ni l'un ni l'autre été identifiés au radar avant la collision et qui ne recevaient à ce moment aucun service de l'ATC. Le contrôleur était occupé à communiquer avec plusieurs autres aéronefs volant en mode IFR, ce qui excluait toute autre surveillance des 2 aéronefs volant en mode VFR.
Les contrôleurs doivent juger si une alerte de conflit est valide et décider de l'intervention appropriée (par exemple, l'émission d'une alerte de sécurité). Ils ne sont pas tenus d'émettre une alerte dans tous les cas de conflit, mais ils doivent prendre une décision en fonction des données affichées pour 2 aéronefs en particulier. Au moment de l'alerte de conflit initiale et de la première mise à jour des 2 cibles d'aéronef, 5 secondes plus tard, l'écran radar montrait que les aéronefs maintenaient un espacement vertical de 500 pieds.
Dans le présent événement, les mesures de protection disponibles pour éviter la collision en vol ont failli. Il s'agissait du principe voir et éviter et des services d'ATC sous forme de surveillance radar et d'alerte de danger de collision. Les systèmes actuels d'évitement des collisions entre aéronefs varient sur le plan du coût, de leur complexité et de leurs fonctionnalités. Si ces 2 aéronefs ou l'un d'entre eux avaient été pourvus d'un tel système, le risque de collision aurait été moindre.
Faits établis
Faits établis quant aux causes et aux facteurs contributifs
- Aucun des pilotes n'a aperçu l'autre aéronef à temps pour éviter une collision en vol, vraisemblablement en raison des limites inhérentes au principe voir et éviter.
- Après avoir reçu l'alerte de conflit, le contrôleur a jugé qu'il n'y avait pas de conflit entre les 2 aéronefs volant selon les règles de vol à vue (mode VFR) et n'a donc pas émis immédiatement une alerte de sécurité. Par la suite, le contrôleur était occupé à communiquer avec plusieurs autres aéronefs volant selon les règles de vol aux instruments, ce qui excluait toute autre surveillance des 2 aéronefs volant en mode VFR.
Faits établis quant aux risques
- En l'absence d'un moyen d'alerter les pilotes volant en mode VFR des risques de conflit qui comblerait les lacunes de la technique voir et éviter actuelle, les risques de collision en vol demeurent.
Autres faits établis
- L'absence de bretelles de sécurité dans le Piper a contribué aux blessures du pilote au cours de l'atterrissage forcé.
Mesures de sécurité
Mesures de sécurité prises
La Federal Aviation Administration (FAA) a depuis modifié la formation des contrôleurs aériens et a émis le 7 juin 2012 une note de service concernant la formation sur les alertes de conflit, qui spécifie ce qui suit :
[traduction] La présente note de service vise à vous informer qu'en plus de la formation d'appoint et de l'enseignement en classe, la formation des finissants et des contrôleurs professionnels accrédités en formation comprend désormais l'activation des alertes de conflit au cours de la simulation sur générateur de cibles amélioré. Au cours de la formation de simulation, l'alerte de conflit est activée lorsque la personne en formation ne reconnaît pas les conflits de trajectoires de vol créés ou intégrés. Les instructeurs enseignent aux personnes en formation les responsabilités qui leur incombent et comment intervenir lorsque des alertes de conflit sont émises. Les scénarios ETD45G intègrent des situations conflictuelles qui permettent d'apprendre à reconnaître les conflits et à intervenir en cas d'alerte de conflit. Les étudiants apprennent les responsabilités qui leur incombent en matière d'alerte de trafic et les tâches qu'ils doivent prioriser.
Préoccupations liées à la sécurité
Cet accident a démontré encore une fois que de se fier uniquement à sa capacité de voir et d'éviter ne suffit pas pour prévenir les collisions entre aéronefs volant en mode VFR dans un espace aérien à forte densité de circulation.
Plusieurs études internationales ont traité en détail de l'efficacité du principe voir et éviter et du risque inhérent de collision. Toutes ces études reconnaissent les limites physiologiques en jeu et concluent que lorsque des collisions en vol surviennent, l'incapacité de voir et d'éviter est presque toujours attribuable au fait de ne pas avoir été en mesure de voir.Note de bas de page 37 Selon une étude, les données suggèrent que le taux relativement bas (mais inacceptable) des collisions en vol des aéronefs de l'aviation générale non équipés d'un système de surveillance du trafic et d'évitement des collisions (TCAS) est attribuable autant à l'immensité de l'espace aérien qu'à l'efficacité de la surveillance visuelle.Note de bas de page 38 Une étude de la British Royal Air Force sur les collisions en vol, jugées aléatoires, a révélé que la probabilité d'un conflit est proportionnelle au carré de la densité de la circulation et recommande d'éviter les restrictions d'altitude qui ont comme effet de concentrer la circulation.Note de bas de page 39 Des mesures comme l'amélioration de la visibilité des aéronefs, des techniques de surveillance visuelle pour les pilotes et de l'information sur la circulation destinée aux pilotes peuvent réduire les risques, mais elles ne compensent pas les limites physiologiques sous-jacentes à l'origine du risque résiduel découlant du principe voir et éviter non appuyé d'alertes.
Avec l'augmentation de la circulation de vols en mode VFR, d'autres mesures de protection doivent être envisagées afin de réduire le risque de collision en vol. Elles pourraient comprendre ce qui suit : changements apportés à la classification des espaces aériens, intervention accrue des services de contrôle de la circulation aérienne (ATC), et dotation de technologies au sol et à bord des aéronefs.
Des changements à la classification des espaces aériens peuvent être apportés afin d'accroître la dotation en services dédiés de l'ATC, y compris l'émission d'avis d'espacement et de circulation aux avions volant en mode VFR dans les espaces aériens très fréquentés. Dans ces cas, la sectorisation des services de l'ATC et la charge de travail des contrôleurs doivent être examinées afin de veiller à ce que les contrôleurs disposent des ressources appropriées pour gérer la circulation aérienne dont ils ont la responsabilité.
Les contrôleurs peuvent recourir aux systèmes d'ATC pour alerter les pilotes des risques de conflit avec d'autres aéronefs. L'efficacité de ces systèmes dépend toutefois du jugement et de la charge de travail des contrôleurs. Le NTSB a déjà fait part de ses préoccupations et a formulé des recommandations pour améliorer l'efficacité de ces systèmes d'alerte de conflit.
Pour améliorer significativement la capacité de voir et d'éviter les autres aéronefs volant en mode VFR, il faudrait peut-être doter les appareils de systèmes capables d'alerter directement les pilotes de la proximité de trafic en conflit. Comme le souligne le présent rapport, plusieurs systèmes d'alerte de bord viables et économiques sont disponibles ou sont en cours d'élaboration. Ces technologies pourraient également réduire les risques de collision en vol.
Le présent rapport met un terme à l'enquête du Bureau de la sécurité des transports du Canada (BST) sur cet événement. Le Bureau a autorisé la publication du rapport le . Il est paru officiellement le .
Annexes
Annexe A – Piste 33 de Warrenton-Fauquier en approche RNAV (GPS)
Note : Ce document est disponible en anglais seulement.
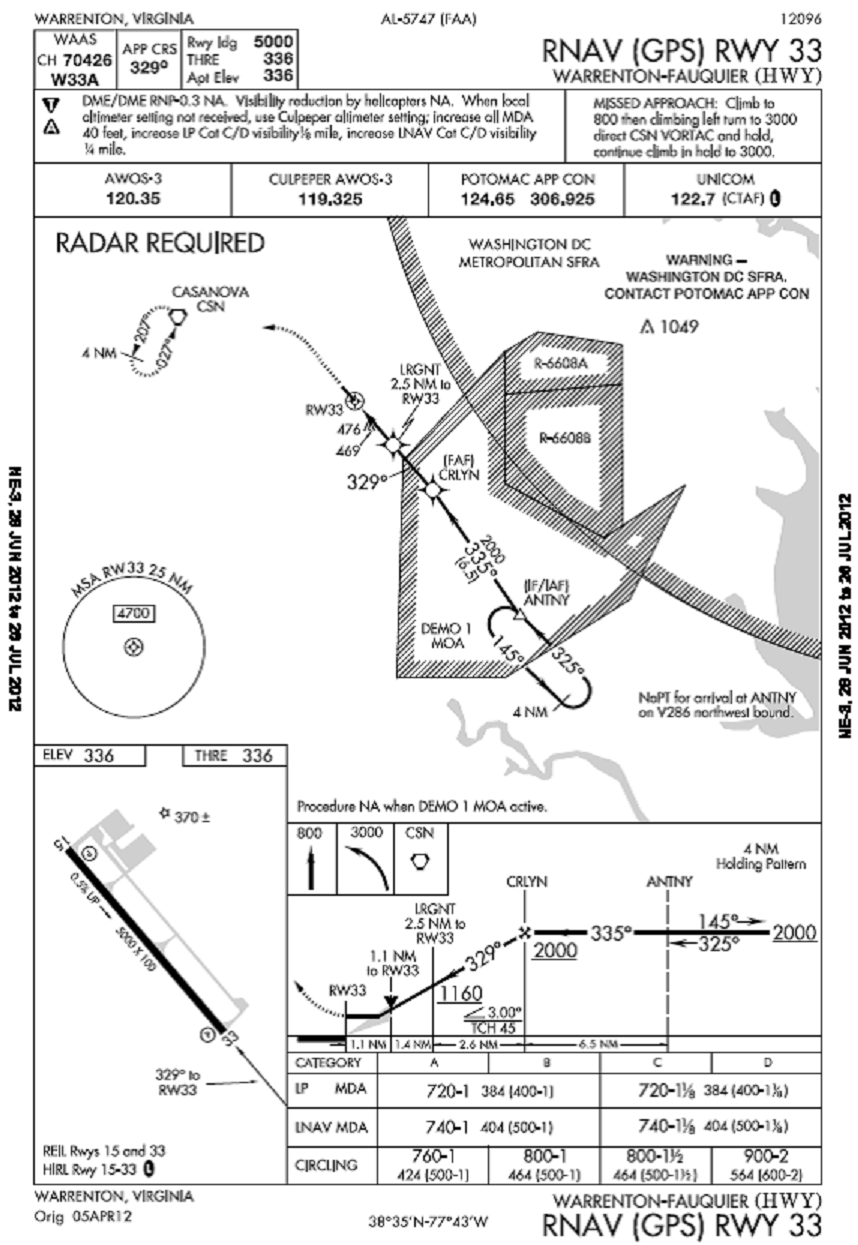
Remarque : Ne doit pas être utilisé pour la navigation
Annexe B – Espace aérien et aéroports
Annexe C – Champs de vision approximatifs
Annexe D – Systèmes d'évitement des collisions aériennes
Système de surveillance du trafic et d'évitement des collisions I (TCAS I)
- Conçu pour l'aviation générale et les lignes aériennes régionales.
- Émet des avis de circulation qui aident les pilotes à repérer visuellement les aéronefs ciblés.
- Système actif constitué d'un émetteur, d'un récepteur, d'antennes directionnelles, d'un ordinateur et d'écrans dans le poste de pilotage.
- Transmet un signal (interrogation) qui sera capté par un aéronef équipé d'un transpondeur (en mode C). Cet aéronef réagira à l'interrogation et répondra. Le système interprète ensuite la réponse et calcule la distance et la direction de l'aéronef qui répond.
- Peut déterminer l'altitude relative de l'aéronef qui répond, et si celui-ci monte ou descend.
- Émet un avis de circulation (visuel et sonore) lorsqu'il relève un risque de conflit.
- La FAA exige qu'un TCAS I soit installé dans les aéronefs pourvus de 10 à 30 sièges.
Avantages
- Assure un niveau de surveillance élémentaire aux équipages de conduite.
Désavantages
- Nécessite que les aéronefs en conflit soient équipés d'un transpondeur.
- Transmet uniquement sur des fréquences limitées à 1030 et 1090 MHz - le nombre d'interrogations sur les transpondeurs augmentera en proportion de l'augmentation du nombre d'aéronefs équipés de TCAS.
- N'émettent que des avis de circulation, et non des avis de résolution : l'équipage doit toujours évaluer la situation et déterminer si une mesure doit être prise.
Coût en 2012 : 22 000 $ US (coût approximatif – le prix d'autres modèles varie de 28 000 $ à 74 000 $)
Système de surveillance du trafic et d'évitement des collisions II (TCAS II)
- Recourt à des transpondeurs fonctionnant en mode S[1].
- Émet des avis de circulation qui aident les pilotes à repérer visuellement les aéronefs ciblés.
- Analyse la trajectoire de vol projetée de l'aéronef qui s'approche et transmet des avis de résolution à l'équipage afin qu'il résolve le conflit potentiel. L'avis de résolution indiquera au pilote s'il faut monter ou descendre afin de résoudre le conflit. Certains modèles peuvent également aviser le pilote de ne pas effectuer de manœuvre.
- Requis, à l'échelle internationale, pour les aéronefs pourvus de plus de 30 sièges ou dont le poids est supérieur à 15 000 kg.
Avantages
- Dans les aéronefs qui en sont équipés, le TCAS II coordonne les avis de résolution d'un conflit avec les autres TCAS II afin d'éviter que les aéronefs n'effectuent les mêmes manœuvres d'évitement.
Désavantages
- Nécessite que les aéronefs en conflit soient équipés d'un transpondeur.
- Ne peut pas transmettre de commandes de virage, mais seulement des commandes de manœuvre verticale.
- Si l'avis de résolution n'est pas transmis à temps au système d'ATC, la manœuvre de résolution peut amener le contrôleur à émettre des instructions d'évitement qui pourraient être en conflit avec l'avis de résolution.
Coût en 2012 : de 150 000 $ à 230 000 $ US
Système d'avis de circulation (TAS)
- Interroge les autres transpondeurs fonctionnant en modes A, C et S et attend une réponse à l'égard d'une cible, puis calcule, dans la mesure du possible, la distance, le gisement, l'altitude et la trajectoire verticale projetée.
- Émet une alerte de trafic lorsqu'il établit l'existence d'une trajectoire de collision.
Avantages
- Fonctionne au sol et avec n'importe quel aéronef équipé d'un transpondeur fonctionnel.
- Système TCAS à faible coût.
Désavantages
- Nécessite l'installation de processeurs distants lourds et volumineux et d'éléments d'antennes complexes.
Coût en 2012 : de 10 000 $ à 20 000 $ US
Système anticollision portable (PCAS)
- Système passif qui capte les transmissions des transpondeurs sur fréquence de 1090 MHz.
- Peut être installé de façon temporaire sur le tableau de bord, ou de façon permanente.
- Certains modèles peuvent fournir des renseignements sur le cap et l'altitude depuis un aéronef équipé d'un transpondeur (les renseignements sur l'altitude ne peuvent être fournis que par des aéronefs équipés d'un transpondeur pouvant coder l'altitude).
- Portée maximale d'environ 6 nm.
- Le système parent interprète les données codées de la cible et fournit la position et l'altitude relatives.
Avantages
- Relativement peu dispendieux; faible coût d'installation.
- Peut être mis en fonction rapidement.
- Apparié à un système GPS de cartographie, peut déterminer la position relative d'une cible avec plus de précision.
Désavantages
- Exige que l'aéronef ciblé soit équipé d'un transpondeur et soit interrogé par un système de contrôle de la circulation aérienne au sol (ou par un aéronef en vol équipé d'un TCAS) afin qu'un transpondeur puisse répondre à l'interrogation.
- Selon l'emplacement du système, il est possible que la structure de l'aéronef parent masque les signaux.
- On a rapporté que le système a déjà signalé des cibles fictives. On a émis l'hypothèse que cela était peut-être attribuable au système captant le signal du transpondeur de l'aéronef parent.
Coût en 2012 : de 550 $ à 1500 $ US
Système d'information sur le trafic (TIS)
- Service au sol qui recourt à un réseau de transmission en mode S pour communiquer aux aéronefs de l'information sur l'évitement des collisions.
- Permet d'indiquer la position, la direction, l'altitude et la montée ou la descente projetée d'autres aéronefs équipés d'un transpondeur se trouvant dans un rayon de 5 nm et jusqu'à 1200 pieds de l'appareil.
- L'information sur le trafic en conflit peut être affichée sur un transpondeur fonctionnant en mode S ou à divers postes de pilotage pourvus d'un écran multifonction courant.
Avantages
- Aucun avantage particulier.
Désavantages
- Exige que les aéronefs soient équipés d'un transpondeur fonctionnant en mode S.
- Peut n'être pas disponible dans toutes les régions.
- Il s'agit d'un service au sol; un aéronef peut être hors de portée.
- Il faut disposer d'un écran multifonction dans le poste de pilotage.
Coût : 5000 $ US (ne comprend pas l'installation)
Système de surveillance dépendante automatique en mode diffusion (ADS-B)
- En voie d'être implanté par la FAA; sera implanté d'ici 2020.
- Donne à chaque aéronef la responsabilité d'assurer lui-même sa navigation et son espacement.
- Les aéronefs pourvus d'un système ADS-B s'identifient eux-mêmes auprès d'un système de géolocalisation et de navigation par un système de satellites (GNSS) et lui transmettent leur vitesse et leurs positions verticale et horizontale. Cette information est retransmise du système GNSS à d'autres aéronefs équipés d'un système ADS-B et à des stations au sol (pourvues d'un service de contrôle de la circulation aérienne). Cette information est transmise sur fréquences de 1090 ou de 978 MHz.
Avantages
- Comme ce système n'a pas besoin de radar, la distance d'un site de radar et le terrain ne sont pas des facteurs qui peuvent interdire la transmission ou la réception d'information sur la position. Il fournit aux pilotes et aux contrôleurs aériens de l'information précise en temps réel sur la position des aéronefs.
Désavantages
- Comme peu d'aéronefs possèdent cet équipement, il faudra compter sur l'équipement radar classique jusqu'à ce que ce système soit implanté.
Coût en 2012 : 8000 $ US (ne comprend pas l'installation)
Système FLARM
- Obtient sa position au moyen d'un dispositif GPS interne et d'un capteur barométrique, puis transmet cette information avec des données prévisionnelles sur la trajectoire de vol tridimensionnelle projetée. Son récepteur capte les signaux des autres systèmes FLARM généralement dans un rayon de 3 à 5 kilomètres, puis traite cette information. Des algorithmes de prévision de mouvement prévoient des conflits possibles en analysant jusqu'à 50 signaux, et des alertes sonores et visuelles sont transmises au pilote, le cas échéant.
- Peut stocker dans une base de données de l'information sur des obstacles aériens fixes, tels que des câbles.
- Fonctionne selon protocole de transmission de données série public, mais le moteur de prévision du protocole de transmission radio du système est un produit commercial exigeant une licence d'utilisation; le moteur de prévision est breveté par Onera (France).
Avantages
- Petite taille.
- Facile à installer.
- Consomme peu d'énergie.
- Fournit des alertes visuelles et sonores lorsque des aéronefs ou des obstacles sont à proximité.
Désavantages
- Optimisé pour les besoins précis des petits aéronefs, tels que les planeurs, mais non conçu pour les communications longue portée ni pour interagir avec un système de contrôle de la circulation aérienne.
- Exige que les autres aéronefs soient également équipés du système FLARM.
Coût en 2012 : 900 $ US (ne comprend pas l'installation)
Appendices
Appendix A – RNAV (GPS) RWY 33 Warrenton-Fauquier
Note: Not for navigational purposes
Appendix B – Airspace and Airports
Appendix C – Approximate Fields of View
Appendix D – Airborne Collision Avoidance Systems
Traffic Alert and Collision Avoidance System (TCAS) I
- Intended for general aviation and regional airlines.
- Issues traffic advisories (TA) that assist pilots to visually acquire target aircraft.
- Active system consisting of a transmitter, receiver, directional antennas, computer and cockpit displays.
- Transmits a signal (interrogation) that will be received by a transponder equipped (Mode C) aircraft. This aircraft will respond to the interrogation and reply. The system will interpret the reply and calculate the distance and direction of the responding aircraft.
- Able to determine the responding aircraft's relative altitude and whether it is climbing or descending.
- Issues a traffic advisory (visually and aurally) if a potential conflict is determined.
- The FAA mandated that TCAS I be installed on aircraft with 10 to 30 seats.
Advantages
- Provides a basic level of surveillance to flight crews.
Disadvantages
- Requires that conflicting aircraft be equipped with a transponder.
- Only transmits on 1030/1090 MHz frequencies - As the density of TCAS equipped aircraft increases, there is a corresponding increase in interrogations of transponders.
- Provides advisory alerts only; the crew is still required to assess the situation and determine a resolution.
Cost in 2012: Approximately $22 000 USD (Other units range from $28 000 to $74 000)
Traffic Alert and Collision Avoidance System (TCAS) II
- Uses Mode S[1] transponders.
- Issues traffic advisories (TA) that assist pilots in visually acquiring target aircraft.
- Analyzes the projected flight path of approaching aircraft and will issue resolution advisories (RA) to the crew in order to resolve potential conflicts. The RA will advise the pilot to climb or descend in order to resolve the conflict. Some models may also advise the pilot not to manoeuvre.
- Required internationally in aircraft with more than 30 seats or weighing more than 15 000 kg.
Advantages
- When resolving conflicts with TCAS II-equipped aircraft, the TCAS II units will co-ordinate RA in order to avoid mirroring their manoeuvres.
Disadvantages
- Conflicting aircraft are required to be equipped with transponders.
- Restricted to provide commands for vertical manoeuvring, and not for turns.
- If not communicated to ATC in a timely manner, RA manoeuvring may cause the controller to issue avoidance instructions that may conflict with RA.
Cost in 2012: $150 000 to $230 000 USD
Traffic Advisory System
- Interrogates other Mode A, C and S transponder systems and listens for a target reply, and then calculates as much of distance, relative bearing, altitude and vertical trend as possible.
- Issues a traffic alert (TA) if the system calculates a collision course.
Advantages
- Works on the ground and will work with any aircraft with an installed and functioning transponder.
- Lower cost evolution of TCAS.
Disadvantages
- Installations are significant; include heavy and large remote processors and complex antenna work.
Cost in 2012: $10 000 to $20 000 USD
Portable Collision Alert System (PCAS)
- Passive system that listens for a 1090 MHz transponder transmission.
- Can be temporarily mounted on the dash or permanently panel mounted.
- Certain units can provide directional and altitude information from transponder-equipped aircraft (altitude information can only be provided from aircraft equipped with transponders with altitude-encoding capability).
- The maximum range is approximately 6 nm.
- The parent unit will interpret the target's coded data and provide a relative position and altitude.
Advantages
- Relatively inexpensive, with a minimal investment in installation.
- Can be readily utilized.
- When coupled with GPS mapping equipment, the relative position of target aircraft can be better appreciated.
Disadvantages
- Requires target aircraft to be transponder-equipped, and that the target aircraft be interrogated by an ATC ground station (or from airborne TCAS-equipped aircraft) resulting in the transponder replying to that interrogation.
- Depending on where the unit is located, there is a potential for shadowing by the parent aircraft's structure.
- Units have also been reported to alert bogus targets. It has been suggested that this may be due to the unit reading the parent aircraft's transponder signal.
Cost in 2012: $550 to $1500 USD
Traffic Information System (TIS)
- Ground-based service that utilizes the Mode S datalink to communicate collision avoidance information to the aircraft.
- The system can show location, direction, altitude and climb/descent trends of other transponder-equipped aircraft within 5 nm and 1200 feet of your aircraft.
- Threat traffic information can be displayed on the Mode S transponder or a variety of cockpit units including many popular multi-function displays.
Advantages
- No distinct advantage.
Disadvantages
- Requires aircraft to be Mode S transponder equipped.
- May not be available in all areas.
- Ground-based; aircraft can fly out of range.
- Needs a multi- function cockpit display.
Cost in 2012: $5000 USD (not installed)
Automatic Dependent Surveillance – Broadcast (ADS-B)
- System being implemented by the FAA; ADS-B (Out) implemented by 2020.
- Each aircraft is responsible for its own navigation and separation.
- ADS-B aircraft transmit their identification, speed and vertical and horizontal positions to a global navigation satellite system (GNSS). This information would be rebroadcast by the GNSS to other ADS-B-equipped aircraft and ground stations (ATC). Information will be broadcast on 1090 MHz or 978MHz.
Advantages
- The system is not radar dependent, therefore distance from a radar site and terrain will not interfere with the transmission/reception of data. The system will provide pilots and air traffic controllers with real-time precise aircraft position information.
Disadvantages
- Not many aircraft are equipped with this equipment, so there will be a reliance on traditional radar until such time as the program has been implemented.
Cost in 2012: $8000 USD (not installed)
FLARM
- Obtains its position from an internal GPS and a barometric sensor and then broadcasts this with forecast data about the future 3D flight track. Its receiver listens for other FLARM devices within typically 3-5 kilometres and processes the information received. Motion-prediction algorithms predict potential conflicts for up to 50 other signals and warn the pilot using sound and visual means.
- Can store information about static aerial obstacles, such as cables, in a database.
- The system's serial data protocol is public, while the prediction engine of the FLARM radio-protocol is proprietary and licensed to manufacturers. The prediction engine itself is patented by Onera (France).
Advantages
- Small size.
- Simple installation.
- Low power consumption.
- Provides visual and acoustic warnings for aircraft and fixed obstacle.
Disadvantages
- Optimised for the specific needs of small aircraft such as gliders, not for long-range communication or ATC interaction.
- Requires other aircraft to be equipped with FLARM.
Cost in 2012: $900 USD (not installed)