Impact sans perte de contrôle Bradley Air Services Limited (First Air) Boeing 737-210C, C-GNWN Resolute Bay (Nunavut)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Le 20 août 2011, l'avion mixte Boeing 737-210C (immatriculation C-GNWN, numéro de série 21067), exploité par Bradley Air Services Limited sous l'appellation commerciale First Air, effectue le vol nolisé First Air 6560 entre Yellowknife (Territoires du Nord-Ouest) et Resolute Bay (Nunavut). À 16 h 42, temps universel coordonné (11 h 42, heure avancée du Centre), pendant l'approche de la piste 35T, le vol First Air 6560 percute une colline à environ 1 mille marin à l'est de la piste. L'avion est détruit par la force de l'impact et l'incendie qui s'ensuit. Huit passagers et les 4 membres d'équipage subissent des blessures mortelles. Les 3 autres passagers sont grièvement blessés et sont secourus par des membres du personnel des Forces canadiennes qui se trouvent à Resolute Bay dans le cadre d'un exercice militaire. L'accident survient en plein jour. La radiobalise de repérage d'urgence de l'avion ne transmet aucun signal.
1.0 Renseignements de base
1.1. Déroulement du vol
L'Annexe 13 à la Convention relative à l'aviation civile internationale de l'Organisation de l'aviation civile internationale (OACI)Footnote 1 exige que les États qui mènent des enquêtes sur les accidents protègent les enregistrements des conversations dans le poste de pilotage. Le Canada se conforme à cette exigence en protégeant les enregistrements des conversations dans le poste de pilotage aux termes de la Loi sur le Bureau canadien d'enquête sur les accidents de transport et de la sécurité des transports. Même si le Bureau de la sécurité des transports du Canada (BST) peut faire usage de tout enregistrement de bord dans l'intérêt de la sécurité des transports, il n'est pas autorisé à divulguer sciemment les parties d'un enregistrement de bord qui n'ont aucun rapport avec les causes ou les facteurs contributifs d'un accident ou avec la détermination des lacunes de sécurité.
Le contenu des enregistreurs de conversations de poste de pilotage (CVR) est protégé pour assurer la disponibilité de ces données essentielles aux enquêtes de sécurité. Le BST a toujours respecté ses obligations en la matière et a toujours rigoureusement limité l'usage des données des CVR dans ses rapports. À moins que le contenu du CVR soit requis pour appuyer un fait établi et cerner une lacune importante en matière de sécurité, il n'est pas inclus dans le rapport du BST.
Le BST a eu recours de façon importante aux enregistrements du CVR dans le présent rapport. Dans chaque cas, les données ont été soigneusement étudiées pour s'assurer que les extraits utilisés sont liés aux causes ou aux facteurs contributifs de cet accident ou qu'ils contribuent à déterminer les lacunes de sécurité.
L'avion mixteFootnote 2 Boeing 737-210C de First Air a décollé de Yellowknife (CYZF) (Territoires du Nord-Ouest) à 14 h 40Footnote 3 pour effectuer le vol nolisé 6560 (FAB6560) de First Air à destination de Resolute Bay (CYRB) (Nunavut), avec 11 passagers, 4 membres d'équipage et du fret à son bord.
Selon le plan de vol, le vol au départ de CYZF devait durer 2 heures 5 minutes et être effectué selon les règles de vol aux instruments (IFR) à une vitesse vraie de 426 nœuds et une altitude de croisière au niveau de vol (FL) 310Footnote 4. Le contrôle de la circulation aérienne (ATC) a autorisé le vol FAB6560 à se rendre à destination par la route indiquée au plan de vol : de CYZF en passant directement par l'intersection BOTER, ensuite directement au radiophare non directionnel (NDB) de Cambridge Bay (CB), puis directement à 72° N, 100°45′ W et enfin directement vers CYRB (figure 1). L'aéroport de dégagement prévu était celui de Hall Beach (CYUX) (Nunavut). L'heure d'arrivée prévue (ETA) à CYRB était 16 h 45.
Figure 1. Carte du trajet (image : Google Earth, avec annotations du BST)
Le commandant de bord occupait le siège gauche et était le pilote aux commandes (PF). Le premier officier (P/O) occupait le siège droit et était le pilote qui n'est pas aux commandes (PNF).
Avant le départ, le service de répartition des vols de First Air a fourni à l'équipage un plan de vol exploitation comprenant les conditions météorologiques prévues et observées à CYZF, CYRB et CYUX, ainsi que les NOTAM (avis aux navigants).
Selon les données radar, à 14 h 50, FAB6560 est entré dans l'espace aérien intérieur du Nord (NDA) à 50 milles marins (nm) au nord-est de CYZF, approximativement au point de cheminement RIBUN (63°11,4′ N, 113°32,9′ W).
Pendant la montée et après la mise en palier de l'aéronef à FL310, l'équipage a reçu des mises à jour des conditions météorologiques à CYRB d'un agent d'opérations de l'entreprise (annexe A). L'équipage et l'agent d'opérations ont discuté des conditions météorologiques qui se dégradaient à CYRB et se sont demandé si le vol devait retourner à CYZF, se rendre à l'aéroport de dégagement CYUX ou continuer jusqu'à CYRB. L'équipage et l'agent d'opérations ont décidé d'un commun accord que le vol se poursuivrait jusqu'à CYRB.
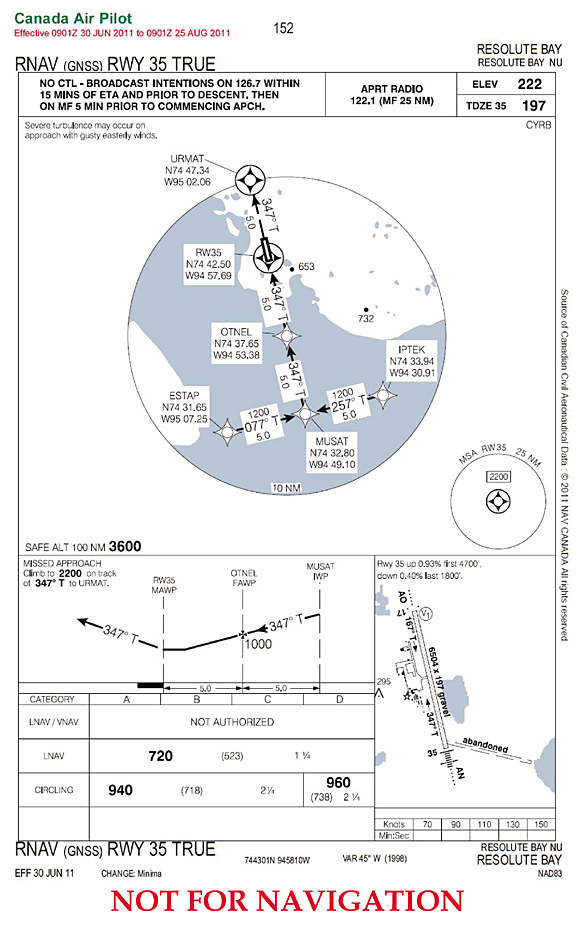
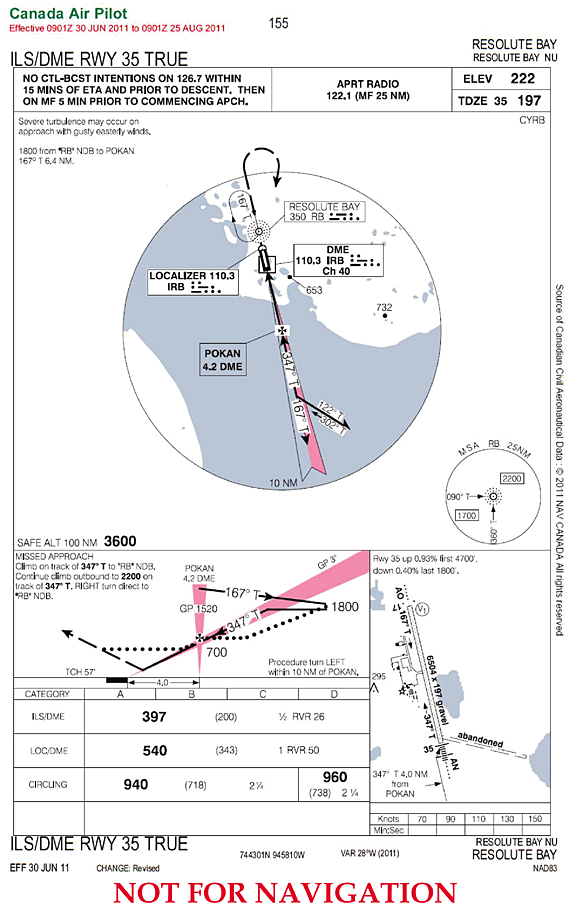
À 16 h 16, l'équipage a programmé les systèmes de positionnement mondial (GPS) en vue de procéder de leur position en route actuelle directement au point de cheminement intermédiaire MUSAT de l'approche RNAV (GNSS)Footnote 5 de la piste d'atterrissage 35T (degrés vrais) à CYRB (annexe B), que l'équipage avait antérieurement chargé dans les GPS. L'équipage prévoyait faire la transition vers une approche ILS/DMEFootnote 6 de la piste 35T (annexe C) en passant par le point de cheminement MUSAT.
Une région de contrôle terminal militaire (MTCA) temporaire avait été prévue afin de prendre en charge une augmentation de la circulation aérienne à CYRB en raison d'un exercice militaire, l'opération NANOOKFootnote 7. Une unité militaire de contrôle terminal à CYRB devait prendre en charge l'espace aérien de 700 pieds au-dessus du sol (agl) jusqu'au FL200, dans un rayon de 80 nm de CYRB.
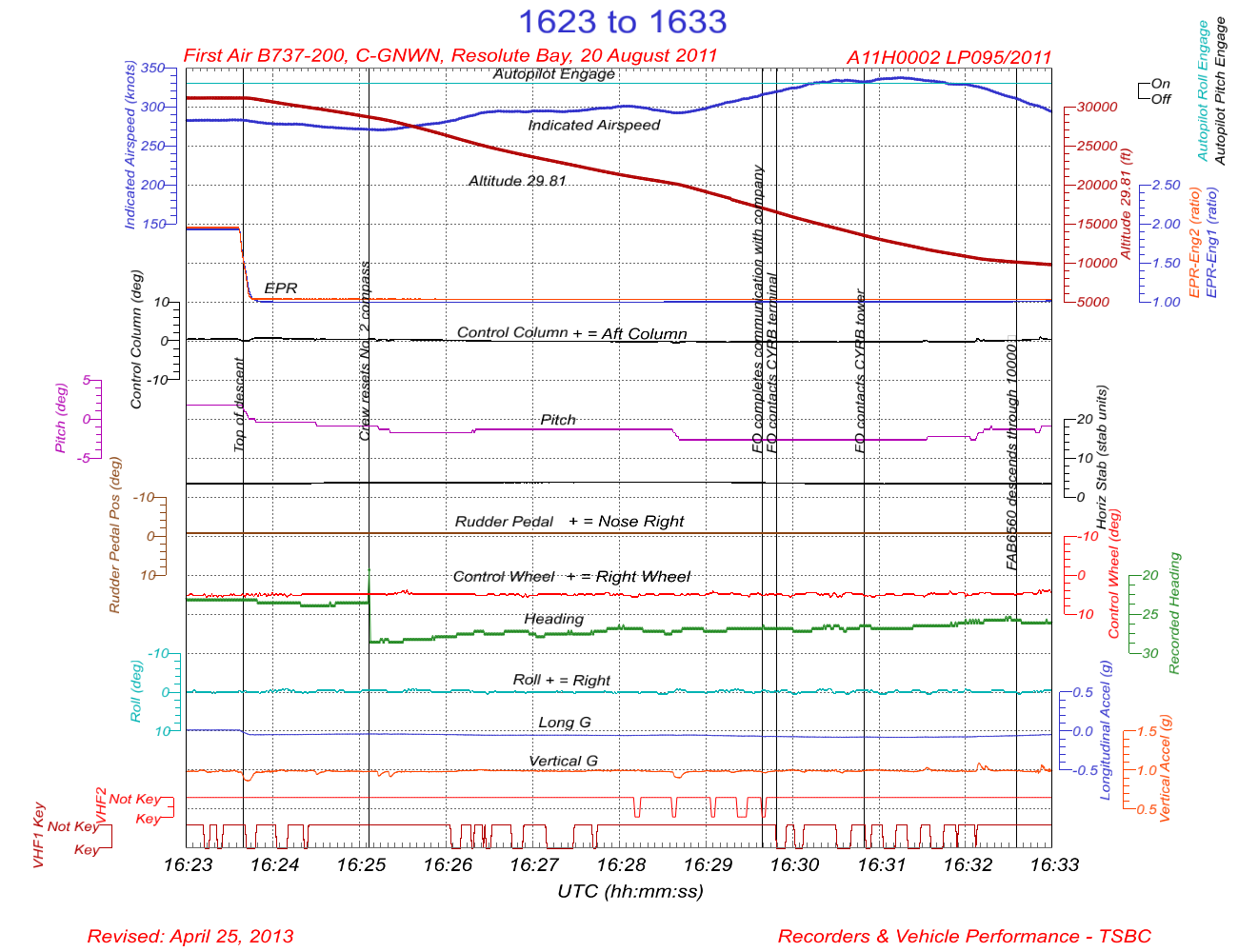
À partir de 16 h 22 min 16 s, le P/O a effectué 3 transmissions avant d'établir la communication avec le contrôleur du centre de contrôle régional (ACC) d'Edmonton de NAV CANADA. À 16 h 23 min 29 s, le contrôleur de l'ACC d'Edmonton de NAV CANADA a autorisé FAB6560 à descendre pour sortir de l'espace aérien contrôlé et a demandé de l'aviser en quittant le FL270. L'équipage a aussi été avisé qu'il devait prévoir appeler l'unité de contrôle terminal de CYRB après avoir quitté le FL270, et qu'il y aurait une couche d'espace aérien non contrôlé entre le FL270 et le FL200. Le P/O a accusé réception de ces renseignements. Le vol FAB6560 a quitté le FL310 en descente à 16 h 23 min 40 s à 101 nm de CYRB.
L'équipage a commencé la liste de vérifications avant descente à 16 h 24 et l'a terminée à 16 h 25.
À 16 h 26, l'équipage a avisé le contrôleur de l'ACC d'Edmonton de NAV CANADA que l'appareil quittait le FL260. À 16 h 27 min 9 s, le P/O a ensuite appelé le contrôleur terminal de CYRB pour lui donner une ETA de 16 h 43 et lui faire connaître l'intention de l'équipage d'effectuer une approche de la piste 35. L'intelligibilité du signal radio entre FAB6560 et le contrôleur terminal de CYRB était faible, et le contrôleur terminal de CYRB a demandé à l'équipage de réessayer lorsque l'appareil se rapprocherait de quelques milles.
À 16 h 29, l'équipage a communiqué avec l'agent de First Air à CYRB sur la fréquence de la compagnie. L'équipage a informé l'agent de l'heure d'arrivée prévue et des besoins en carburant. L'équipage a ensuite contacté le contrôleur terminal de CYRB une fois de plus, et celui-ci a informé l'équipage que la communication était maintenant meilleure. Le contrôleur terminal de CYRB a indiqué que la MTCA n'était pas encore opérationnelle, et a fourni le calage altimétrique et les renseignements sur le trafic pour un autre vol arrivantFootnote 8. Le contrôleur terminal de CYRB a ensuite demandé à l'équipage de communiquer avec le contrôleur tour de CYRBFootnote 9 à sa discrétion. Le P/O a accusé réception des renseignements sur le trafic et de l'instruction de communiquer avec la tour de CYRB.
À 16 h 31, l'équipage a communiqué avec le contrôleur tour de CYRB, qui l'a avisé du calage altimétrique (29,81 pouces de mercure [po Hg]) et des vents (estimésFootnote 10 du 160° vrai [V] à 10 nœuds) et lui a donné l'instruction de signaler lorsque l'avion se trouvait à 10 nm en approche finale de la piste 35T. L'équipage a demandé un rapport sur l'état de la piste du contrôleur tour, qui l'a informé que la piste était légèrement mouillée et qu'aucun aéronef ne l'avait utilisée au cours de la matinée. Le P/O a accusé réception de ces renseignements.
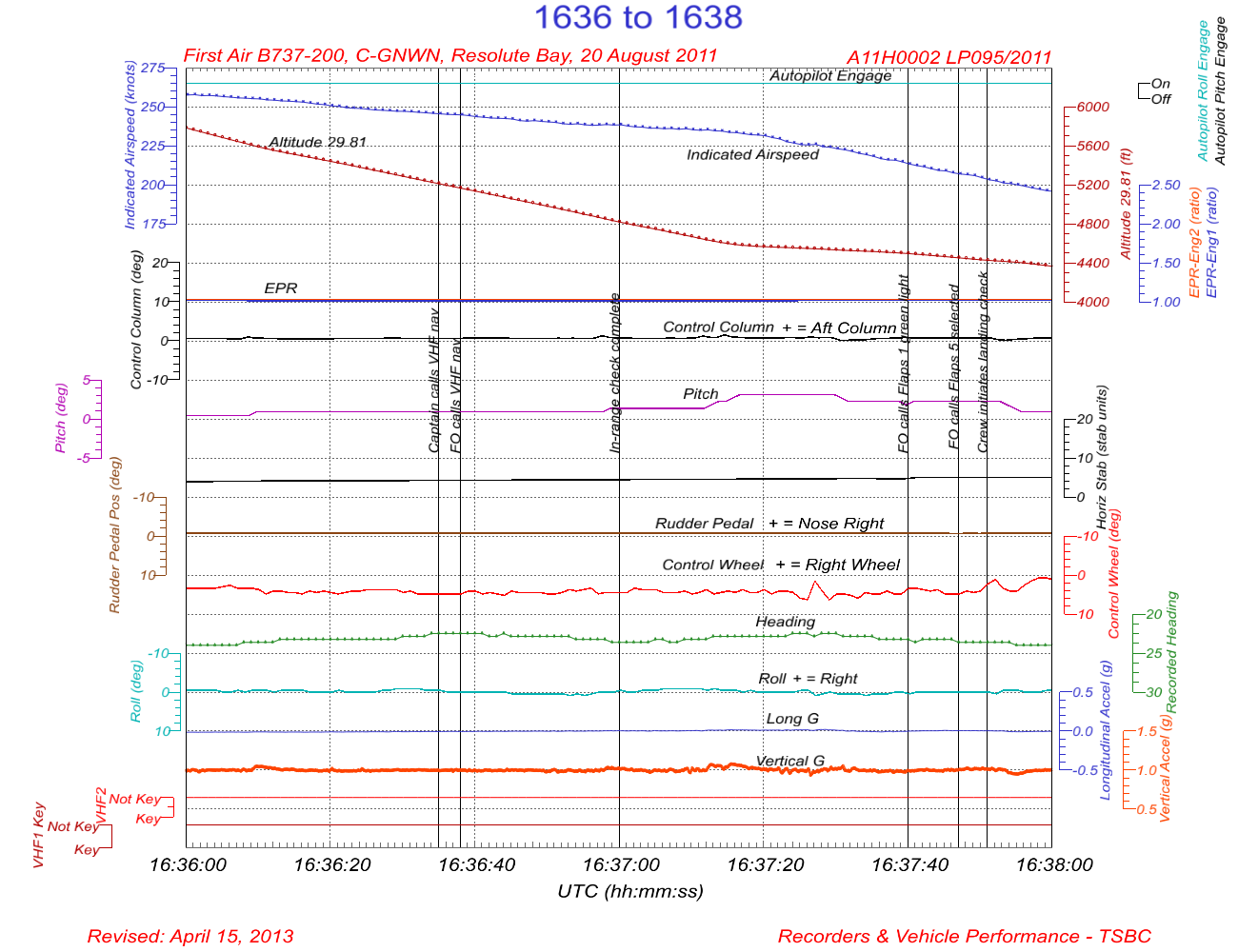
L'équipage a commencé la liste de vérifications en approche à 16 h 32 et l'a terminée à 16 h 37. À 16 h 37, l'équipage a commencé à configurer l'avion pour l'approche et l'atterrissage et a entrepris la liste de vérifications avant l'atterrissage.
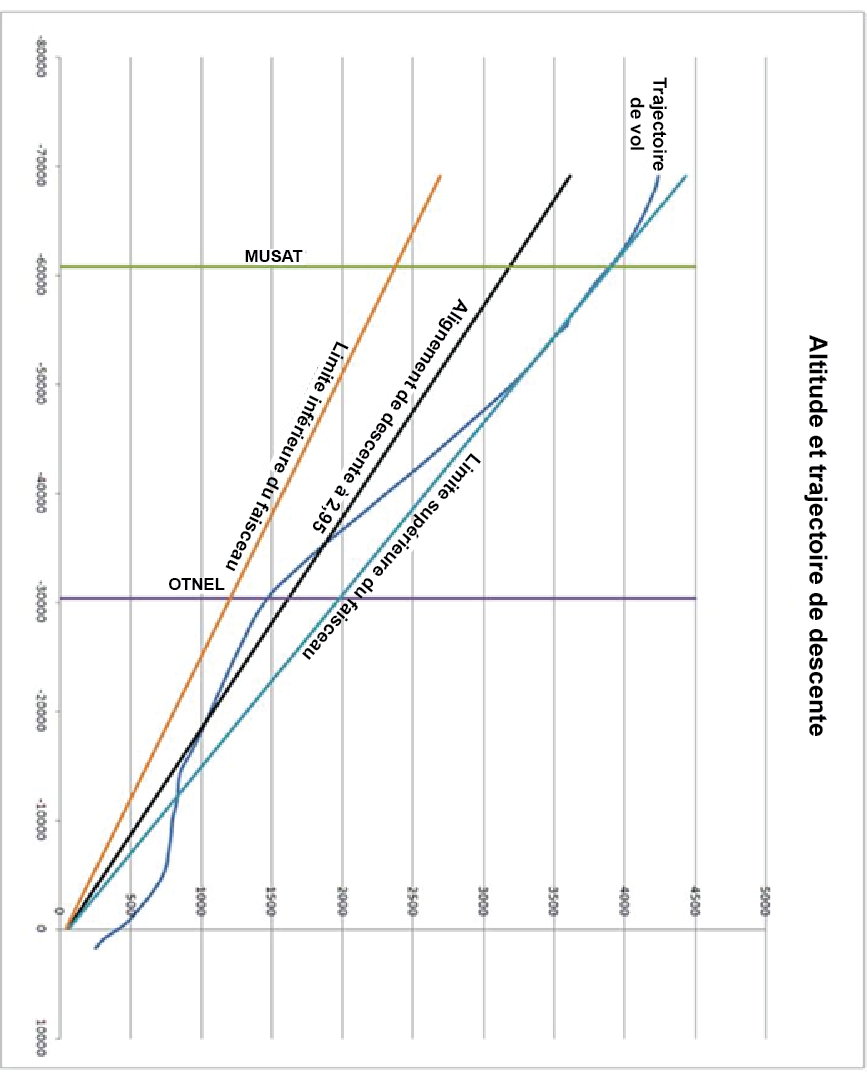
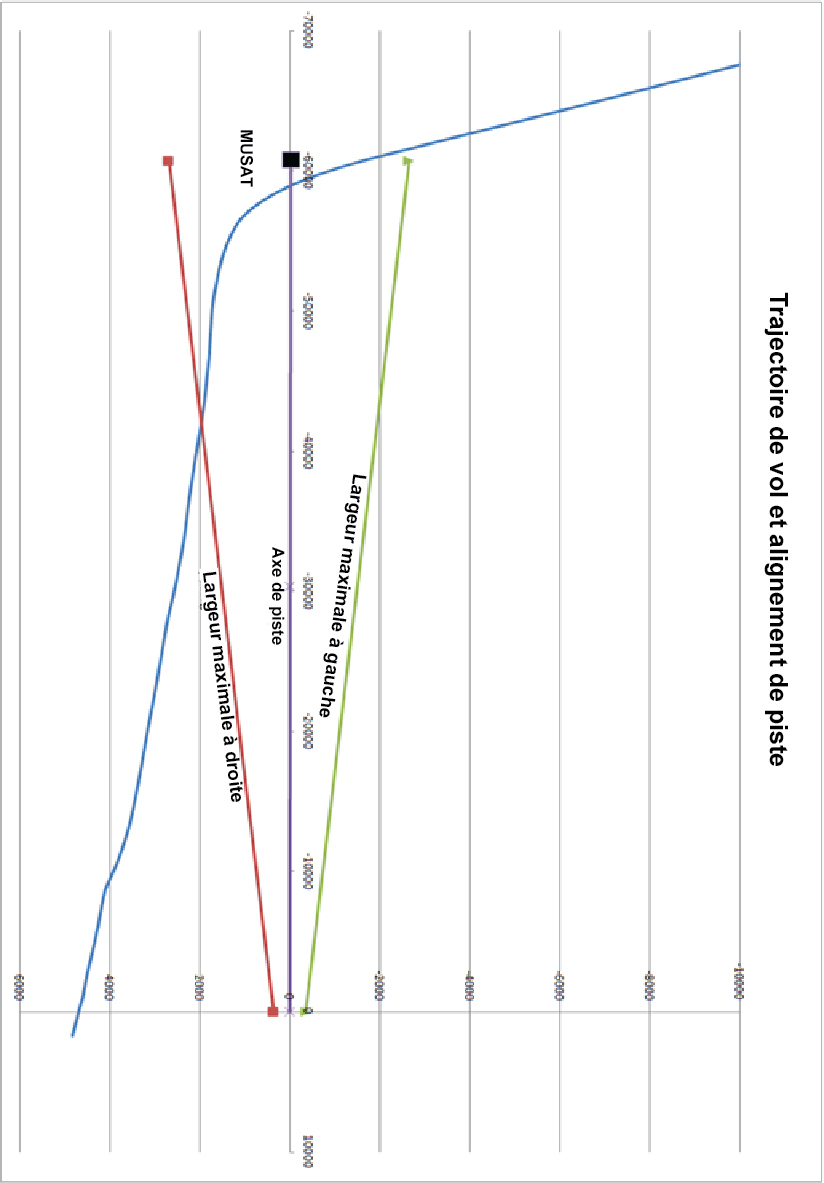
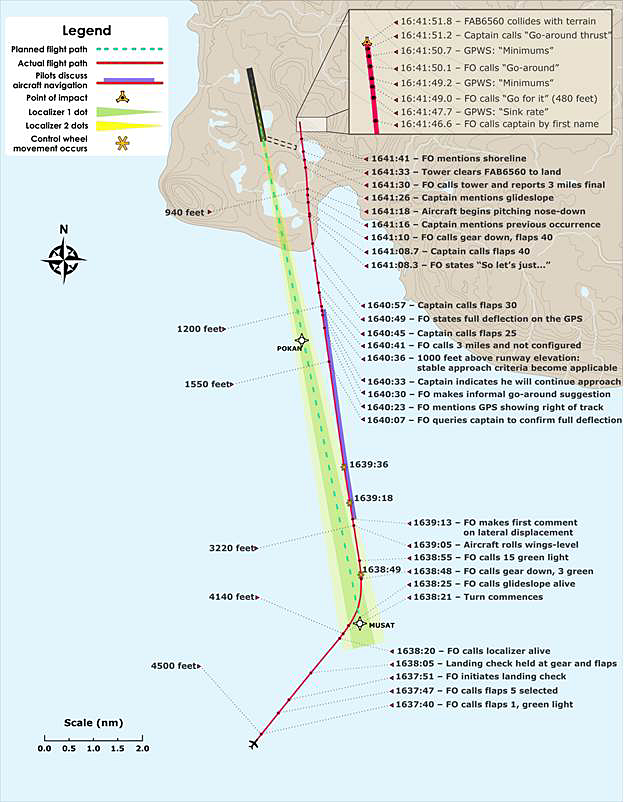
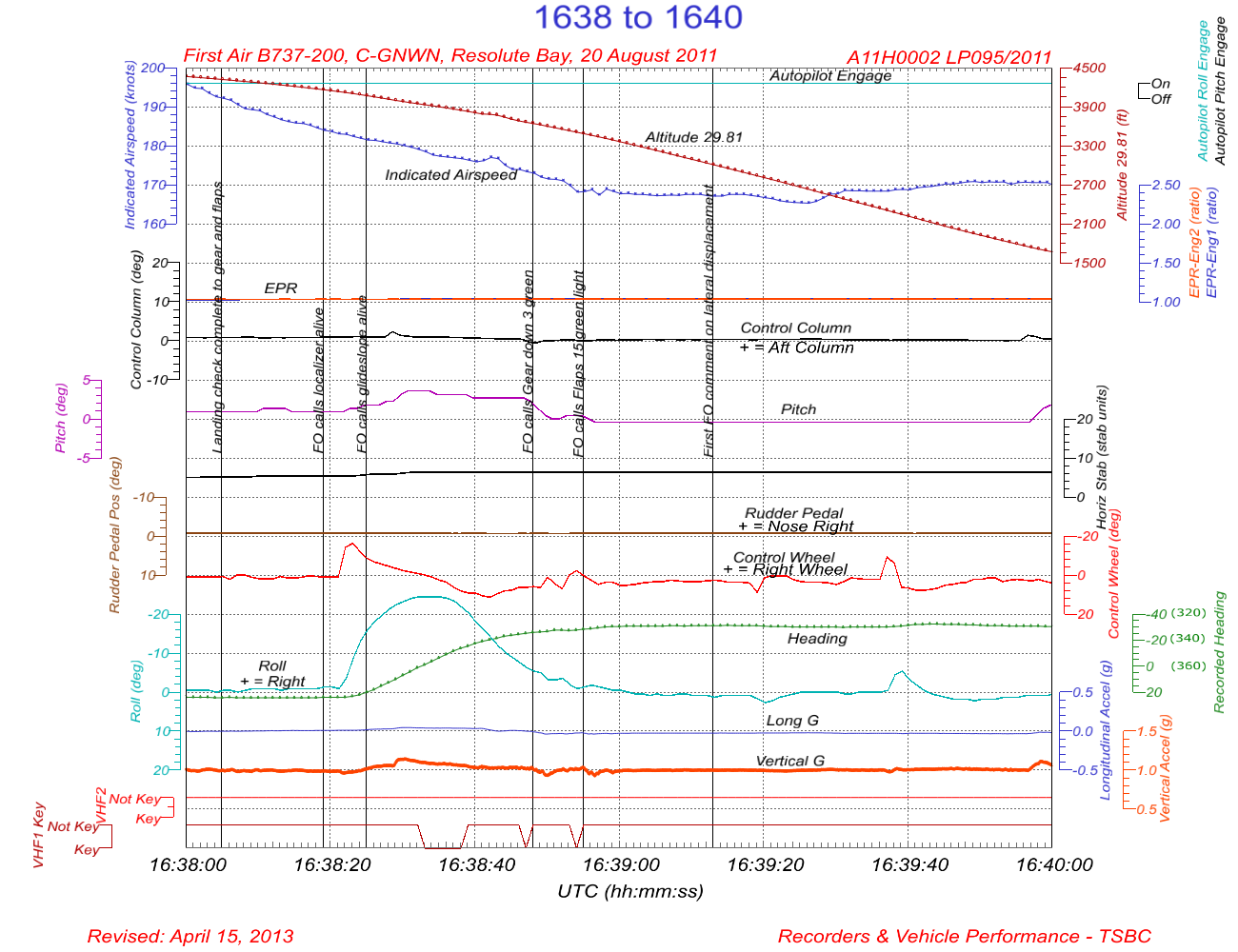
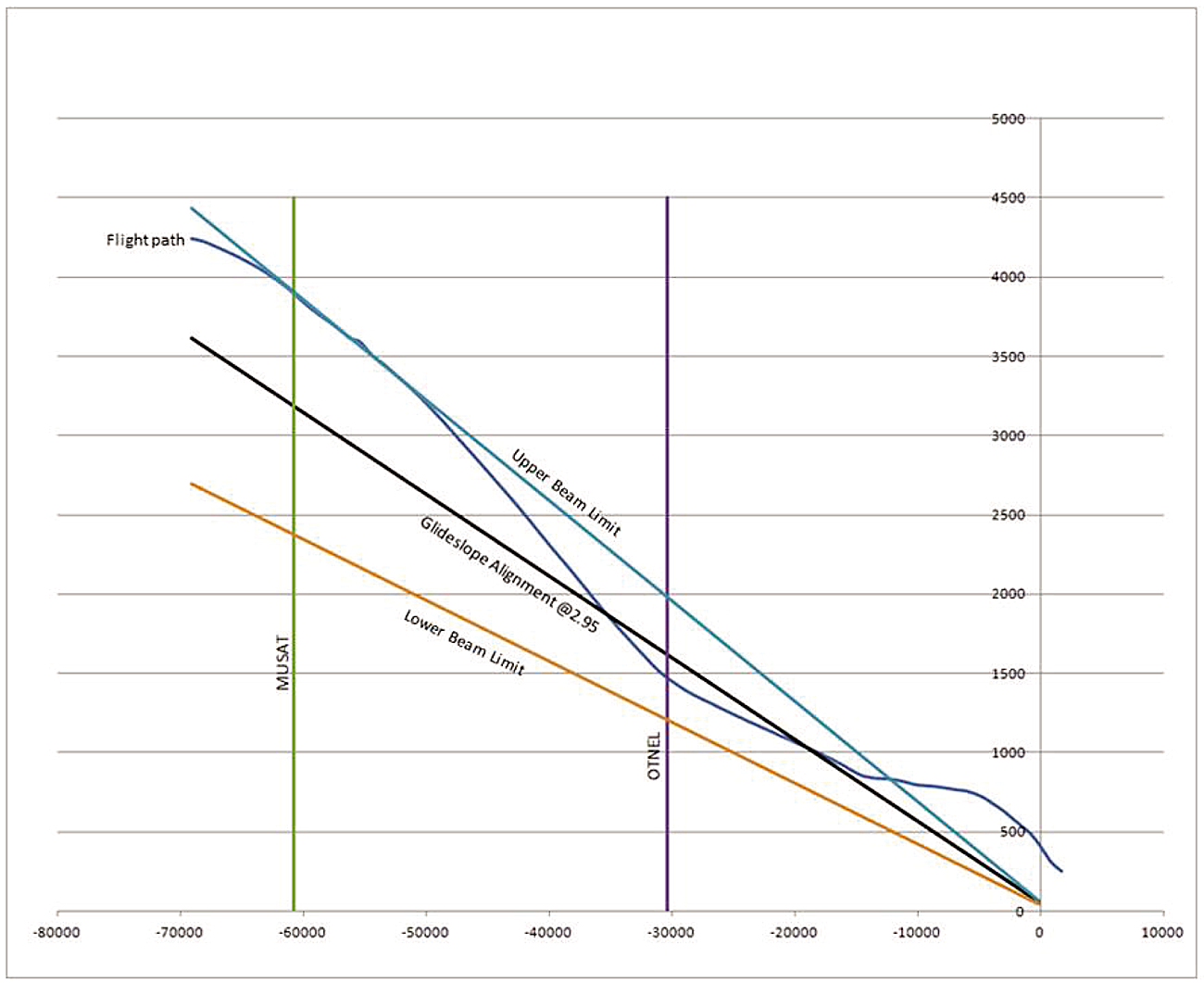
À 16 h 38 min 21 s, FAB6560 a amorcé un virage à gauche juste avant d'atteindre le point de cheminement MUSAT. À ce moment, l'avion volait à environ 600 pieds au-dessus de l'alignement de descente ILS à une vitesse indiquée de 184 nœuds (KIAS). La trajectoire du point de cheminement MUSAT jusqu'au seuil de la piste 35T (degrés vrais) est de 347 °V, ce qui correspond à l'axe d'alignement de l'approche ILS/DME de la piste 35T. Au terme du virage à gauche, FAB6560 a suivi une trajectoire d'environ 350 °V (annexe D).
À 16 h 38 min 32 s, l'équipage a rapporté que l'avion se trouvait à 10 nm en approche finale de la piste 35T. Le commandant a demandé de sortir le train d'atterrissage à 16 h 38 min 38 s et de régler les volets à la position 15 à 16 h 38 min 42 s. La vitesse indiquée au moment de ces demandes était de 177 KIAS. À 16 h 38 min 39 s, le contrôleur tour de CYRB a accusé réception du rapport de l'équipage et lui a donné l'instruction de signaler lorsque l'avion se trouve à 3 nm en approche finale. À 16 h 38 min 46 s, le P/O a demandé à la tour de répéter la dernière transmission. À 16 h 38 min 49 s, la tour a répété l'instruction d'appeler à 3 nm en approche finale; le P/O a accusé réception de la demande. À ce stade de l'approche, l'équipage a tenu une longue discussion sur la navigation de l'appareil (tableau 1).
Tableau 1. Discussion entre les pilotes au sujet de la navigation de l'aéronef
[traduction entre crochets]
De 16 h 39 min 13 s
à
16 h 39 min 30 s
Le P/O fait 5 déclarations relativement à l'écart latéral de l'avion par rapport à la trajectoire voulue.
De 16 h 39 min 33 s
à
16 h 39 min 37 s
Le commandant fait 2 déclarations indiquant sa conviction que le pilote automatique suit la trajectoire correctement.
16 h 39 min 46 s
Le P/O fait une déclaration au sujet de l'écart de trajectoire affiché au GPS.
16 h 39 min 57 s
Le P/O déclare que l'avion n'est pas en mode d'approche au pilote automatique, qu'il est seulement sur le directeur de vol.
16 h 40 min 7 s
Le P/O demande au commandant de confirmer la déviation complète.
16 h 40 min 8 s
Le commandant est d'accord et demande pourquoi une déviation complète lorsqu'ils sont sur l'alignement de piste.
16 h 40 min 11 s
Le P/O déclare qu'ils ne sont pas sur l'alignement de piste.
16 h 40 min 14 s
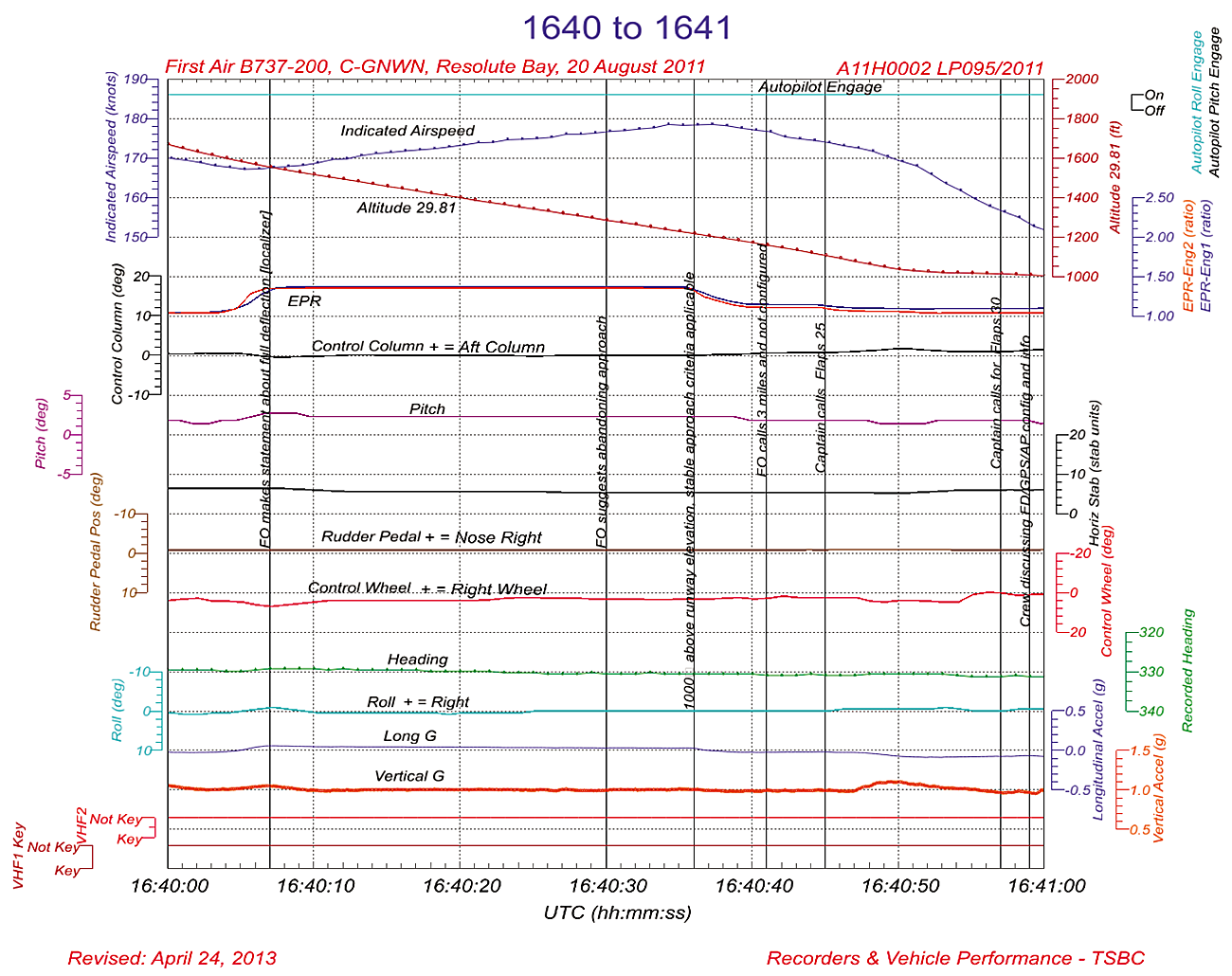
Le commandant déclare « It's captured; ten three is the localizer? » [C'est capté; dix trois est l'alignement de piste?].
16 h 40 min 17 s
Le P/O n'est pas d'accord avec la capture d'alignement de piste et rappelle au commandant la présence d'une colline à droite de la piste.
16 h 40 min 23 s
Le P/O déclare que le GPS indique aussi vers la droite.
16 h 40 min 25 s
Le P/O demande au commandant s'ils ont fait quelque chose d'incorrect.
16 h 40 min 30 s
Le P/O déclare être d'avis qu'ils devraient interrompre l'approche, puis régler le problème de navigation.
16 h 40 min 33 s
Le commandant indique son intention de continuer l'approche.
16 h 40 min 35 s
Le P/O accuse réception de l'intention du commandant de continuer l'approche.
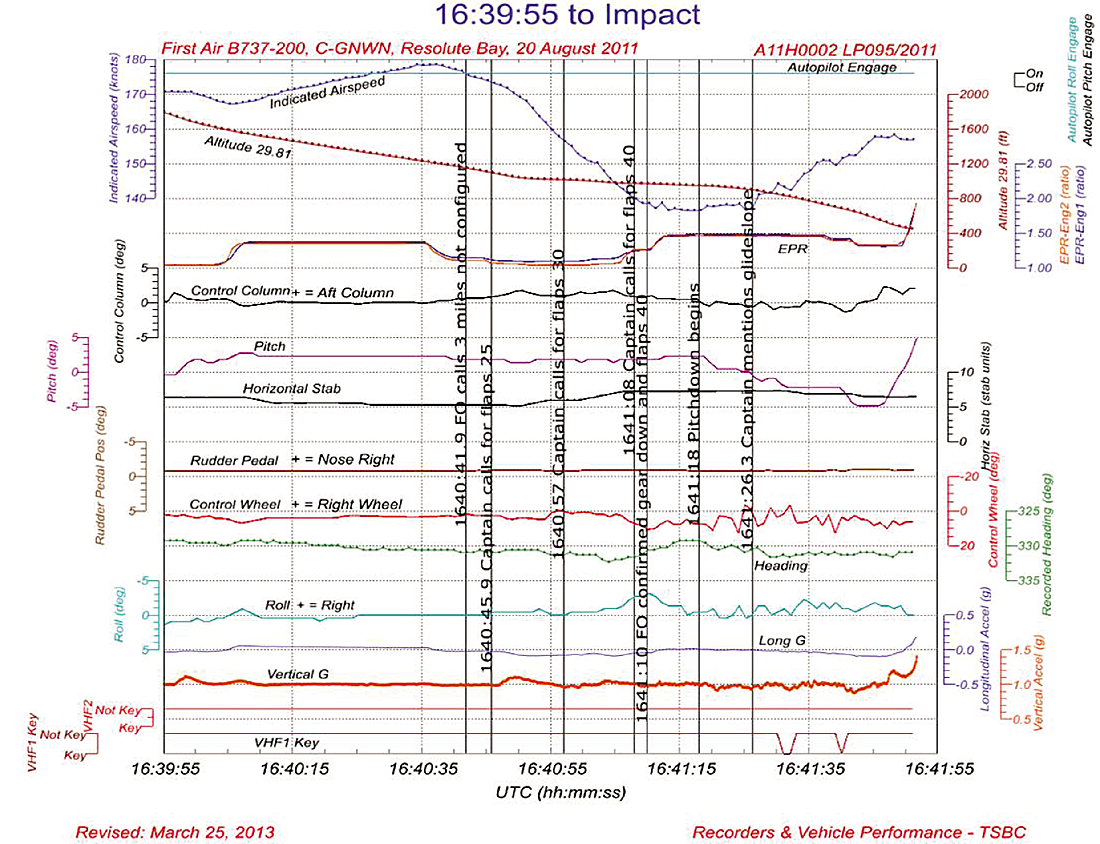
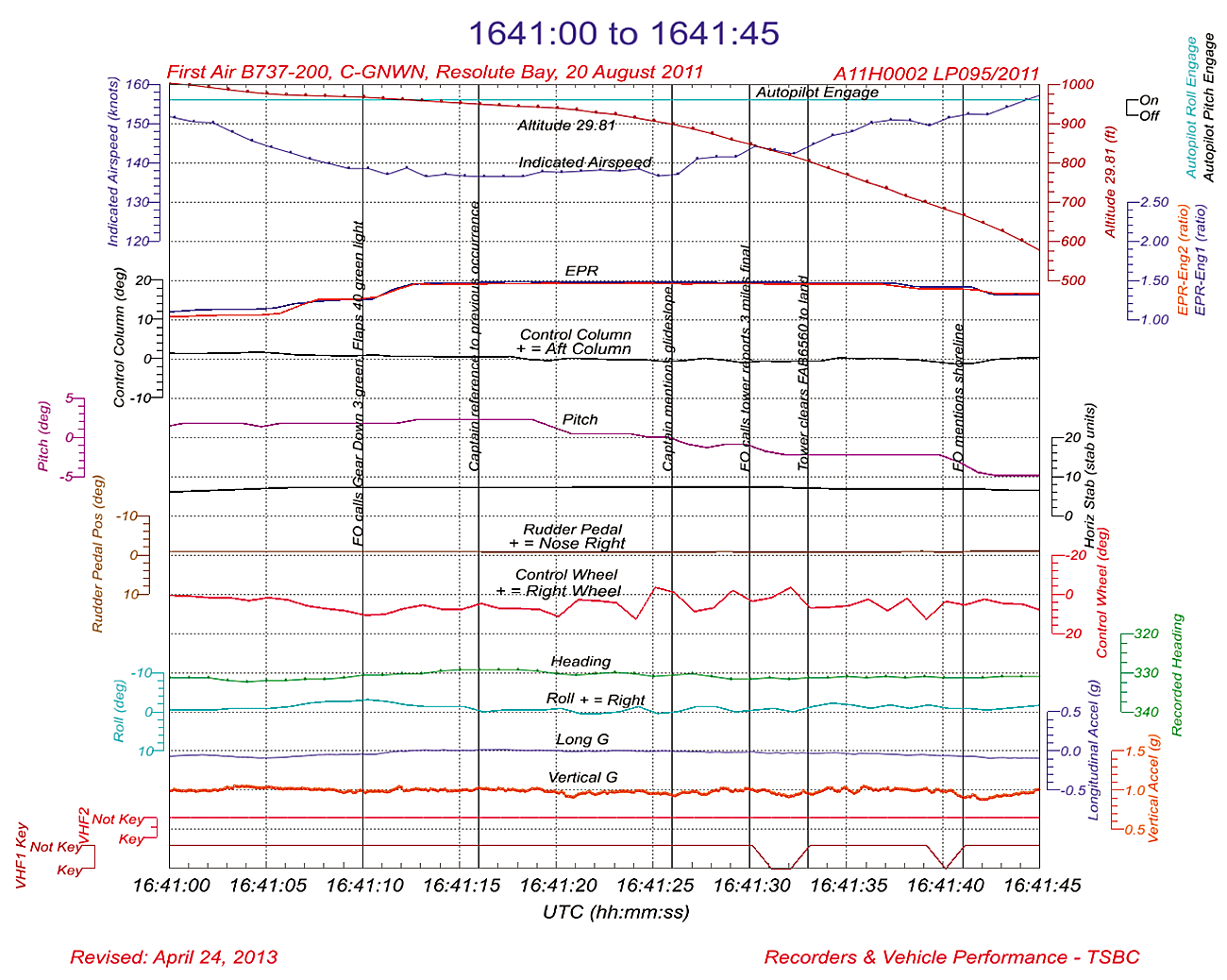
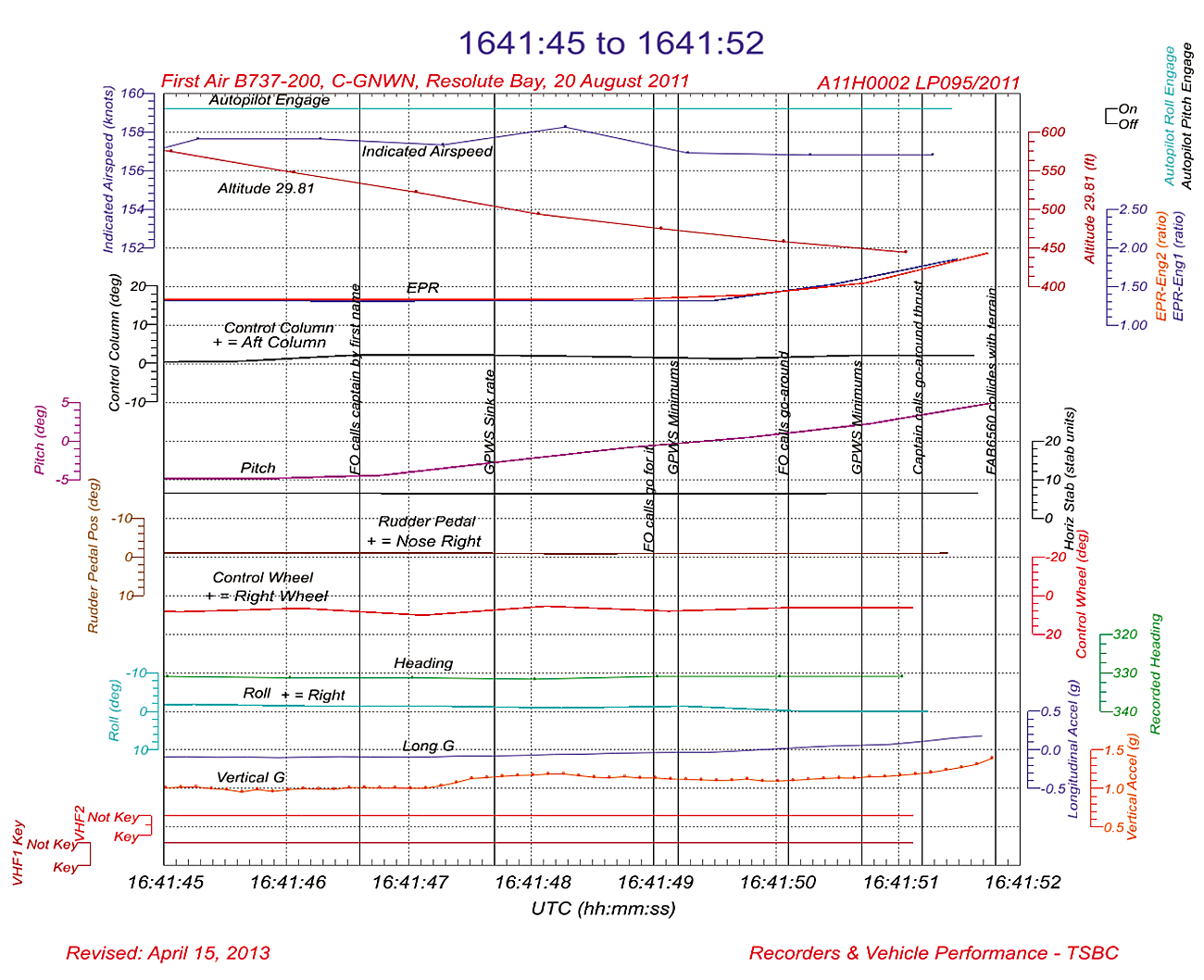
À 16 h 40 min 36 s, FAB6560 est descendu sous 1000 pieds au-dessus de l'aérodrome. Entre 16 h 40 min 41 s et 16 h 41 min 11 s, le commandant a ordonné de terminer la configuration d'atterrissage, et le P/O a fait plusieurs déclarations au sujet de la navigation de l'avion et de mesures correctives. À 16 h 41 min 30 s, l'équipage s'est rapporté à 3 nm en approche finale de la piste 35T (degrés vrais). Le contrôleur tour de CYRB a fait savoir que, selon les estimations, le vent soufflait maintenant du 150 °V à 7 nœuds, a autorisé FAB6560 à atterrir sur la piste 35T et a ajouté l'expression « check gear down » [traduction : vérifier train sorti], comme l'exige le supplément des Forces canadiennes au Manuel d'exploitation du contrôle de la circulation aérienne (MANOPS ATC) de NAV CANADA au paragraphe 344.3Footnote 11.
La réponse de FAB6560 à la tour (à 16 h 41 min 39 s) a été coupée, et la tour a demandé à l'équipage de répéter. Il n'y a pas eu d'autre communication avec l'avion. Le contrôleur tour n'a jamais établi le contact visuel avec FAB6560. Le tableau 2 indique les événements à l'approche finale.
Tableau 2. Événements à l'approche finale [traduction entre crochets]
16 h 41 min 41,1 s
Le P/O déclare : « Just over the shoreline » [juste au-dessus du rivage].
16 h 41 min 46 s
Le tangage commence à augmenter depuis −5°.
16 h 41 min 46,6 s
Le P/O appelle le commandant par son prénom et déclare : « I don't like this » [je n'aime pas ça].
16 h 41 min 47,7 s
GPWS : « Sink rate » [vitesse verticale de descente].
16 h 41 min 49,0 s
Le P/O déclare : « Go for it » [allons-y].
16 h 41 min 49,2 s
GPWS : « Minimums ».
16 h 41 min 50,1 s
Le P/O déclare : « Go around » [remise des gaz].
16 h 41 min 50,7 s
GPWS : « Minimums ».
16 h 41 min 51,2 s
Le commandant demande : « Go-around thrust » [poussée de remise des gaz].
À 16 h 41 min 51,8 s, pendant que l'équipage amorçait une remise des gaz, l'avion est entré en collision avec le relief environ 1 nm à l'est du milieu de la piste de CYRB. L'accident s'est produit en plein jour par 74°42′57,3" N, 94°55′4,0" W, 396 pieds au-dessus du niveau moyen de la mer.
Les 4 membres de l'équipage et 8 passagers ont subi des blessures mortelles. Trois passagers ont survécu à l'accident et ont été secourus par le personnel des Forces canadiennes, qui était à CYRB pour participer à l'opération Nanook. Les survivants ont ensuite été évacués de CYRB à bord d'un aéronef CC-177 des Forces canadiennes.
1.2 Tués et blessés
Tableau 3. Tués et blessés
Équipage de conduite
Passagers
Autres
Total
Tués
4
8
−
12
Blessés graves
−
3
−
3
Blessés légers/indemnes
−
−
−
−
Total
4
11
−
15
1.3 Dommages à l'aéronef
Les marques au sol au point d'impact initial correspondaient au contact de l'antenne VHF (très haute fréquence) no 2Footnote 12, du déflecteur de gravier du train avant, du train d'atterrissage principal gauche et droit et des moteurs de gauche et de droite. Il n'y avait pas de débris provenant du fuselage; par conséquent, le fuselage n'a vraisemblablement pas heurté le sol lors de l'impact initial. La force de l'impact initial a été suffisante pour causer la séparation des moteurs et du train d'atterrissage principal.
Après l'impact initial, l'avion a suivi une trajectoire balistiqueFootnote 13 à proximité du sol, avant de heurter le sol une deuxième fois à environ 600 pieds du point d'impact initial. Après ce deuxième impact, la structure de l'avion s'est considérablement disloquée et s'est rompue en 3 sections principales et en de nombreux débris de plus petite taille.
Les seuls dommages observés attribuables à l'incendie étaient à la partie centrale du fuselage et aux ailes, où un important incendie s'est déclenché après l'impact. L'avion a été détruit par les forces d'impact et l'incendie qui s'est déclaré par la suite.
1.4 Autres dommages
On a récupéré approximativement 296 litres de carburant du réservoir de l'aile gauche pendant l'enquête sur le terrain. Il ne restait pas de carburant dans le réservoir de l'aile droite en raison de l'incendie après l'impact. On a calculé la quantité de carburant qui restait au moment de l'impact en fonction de la capacité nominale des réservoirs, des dossiers de ravitaillement en carburant et des dossiers de plan de vol. Selon ces calculs, on estime à 8118 litres la quantité totale de carburant déversé ou brûlé à la suite de l'événement.
1.5 Renseignements sur le personnel
1.5.1 Équipage de conduite
Les dossiers indiquent que les 2 pilotes possédaient les licences et les qualifications nécessaires pour effectuer le vol, conformément à la réglementation en vigueur.
Tableau 4. Renseignements sur l'équipage de conduite
Commandant de bord
Premier officier
Licence de pilote
Licence de pilote de ligne
Licence de pilote de ligne
Date d'expiration du certificat médical
1er novembre 2011
1er mai 2012
Heures de vol total
12 910
4848
Heures de vol sur type
5200
103
Heures de vol au cours des 7 derniers jours
20
10
Heures de vol au cours des 30 derniers jours
45
58
Heures de vol au cours des 90 derniers jours
105
103
Heures de vol sur type au cours des 90 derniers jours
105
103
Heures de service avant l'événement
3
3
Heures hors service avant la période de travail
11
85
1.5.1.1 Commandant de bord
First Air a embauché le commandant en mars 1996 comme P/O sur un avion de Havilland Canada Limited DHC-6 Twin Otter. En février 1998, le commandant a obtenu un poste de P/O sur un avion Hawker Siddeley HS-748, et en octobre 1999, est passé à un poste de P/O sur un avion Boeing 737 (B737). Le commandant a volé comme P/O sur le B737 jusqu'en mai 2008, date de sa promotion à titre de commandant.
Au cours de ses 15 années au service de First Air, le commandant a acquis de l'expérience de vol dans l'Arctique et connaissait bien l'exploitation en espace aérien non contrôlé à Resolute Bay (CYRB). Le commandant a reçu la formation initiale en gestion des ressources en équipe (CRM) en février 1997, et a terminé sa dernière formation périodique en CRM en novembre 2010.
Durant les 72 heures avant l'accident, le commandant était de service. Le commandant avait eu une période de service de 7 heures le 17 août, suivie de 16,5 heures de repos. Le 18 août, le commandant avait eu une période de service de près de 12 heures, suivie de 17 heures de repos et, le 19 août, le commandant avait eu une période de service de 5,5 heures, suivie de 11 heures de repos, avant de se présenter au travail le 20 août. La fatigue n'est pas considérée comme un facteur contributif à cet événement.
1.5.1.2 Premier officier
First Air a embauché le P/O en septembre 2007 comme P/O sur un aéronef ATR-42 d'Avions de transport régional. En août 2009, le P/O a obtenu un poste de commandant sur un avion ATR-42. En juin 2011, le P/O a obtenu un poste de P/O sur un B737. Au cours de ses 4 années à l'emploi de First Air, le P/O a acquis de l'expérience de vol sur de gros aéronefs dans l'Arctique. Avant d'être embauché par First Air, le P/O était au service d'un autre exploitant commercial à CYZF et pilotait différents petits aéronefs. Le P/O a reçu la formation initiale en CRM en septembre 2007 et a terminé sa dernière formation périodique en CRM en mars 2011.
Le P/O était en congé au cours des 72 heures précédant le 20 août; la fatigue n'est pas considérée comme un facteur contributif à cet événement.
1.5.2 Agents de bord
Selon les dossiers fournis par l'exploitant, les 2 agents de bord avaient reçu la formation appropriée, et toutes leurs qualifications étaient à jour conformément au programme de formation approuvé de l'entreprise. Les horaires de repos des 2 agents de bord satisfaisaient aux exigences réglementaires et à celles de l'entreprise.
1.5.3 Contrôleurs de la circulation aérienne de CYRB
1.5.3.1 Contrôleur terminal
Le contrôleur de la région de contrôle terminal militaire (MTCA) travaillait comme contrôleur dans les forces armées depuis 3 ans. Le contrôleur satisfaisait à toutes les exigences en matière de formation et de qualifications en conformité avec l'Ordonnance administrative des Forces canadiennes 9-18 (délivrance de licence de contrôleur de la circulation aérienne [ATC]). Il a obtenu sa certification de règles de vol aux instruments (IFR) en 2008. Le contrôleur était en service depuis 12 h. Le contrôleur n'avait pas été en service au cours de la période de 72 heures avant l'accident. La fatigue n'est pas considérée comme un facteur contributif.
1.5.3.2 Contrôleur tour
Le contrôleur tour travaillait comme contrôleur dans les forces armées depuis 10 mois. Le contrôleur satisfaisait à toutes les exigences en matière de formation et de qualifications en conformité avec l'Ordonnance administrative des Forces canadiennes 9-18 (délivrance de licence ATC). Il a obtenu sa certification de règles de vol à vue (VFR) en décembre 2010. Le contrôleur avait reçu un exposé et passé un test sur les procédures locales à CYRB avant de commencer à exercer ses activités. Le contrôleur n'était pas certifié en contrôle IFR, et n'était pas tenu de l'être. Le contrôleur était en service depuis 12 h. Au cours de la période de 72 heures avant l'accident, le contrôleur avait été en service un total de 18 heures. La fatigue n'est pas considérée comme un facteur contributif.
1.6 Renseignements sur l'aéronef
Tableau 5. Renseignements sur l'aéronef
Constructeur
The Boeing Company
Type et modèle
737-210C
Année de construction
1975
Numéro de série
21067
Date d'émission du certificat de navigabilité
6 mars 2003
Date d'émission du certificat d'immatriculation
28 avril 2006
Immatriculé au nom de
Bradley Air Services Limited
Nom commercial utilisé (faisant affaire sous le nom de)
First Air
Total d'heures de vol cellule
86 190 (approximatif)
Type de moteur (nombre)
Pratt & Whitney JT8D-17 (2)
Masse maximale autorisée au décollage
119 500 livres
1.6.1 Maintenance de l'aéronef
1.6.1.1 Généralités
First Air Maintenance Services est le principal fournisseur de services de maintenance d'aéronefs de l'exploitant. First Air en est le propriétaire et l'exploitant en vertu d'un certificat d'organisme de maintenance agréé distinct. La maintenance de l'avion en cause (C‑GNWN) devait être effectuée conformément au programme de maintenance approuvé par Transports Canada (TC). Le manuel de contrôle de la maintenance de l'exploitant est le document utilisé pour mettre en œuvre le programme. À part les 2 consignes de navigabilité (CN) mentionnées ci-dessous, il n'y avait aucun autre écart par rapport au programme de maintenance.
Les CN sont des directives que décrivent les inspections spéciales, les remplacements de composants ou les modifications nécessaires pour garantir le maintien de la navigabilité des aéronefs. Les CN sont publiées lorsque l'expérience révèle un danger fonctionnel ou structurel ayant des conséquences sur la sécurité aérienne et qui requiert une attention immédiate. Les CN émanent de l'autorité de l'aviation civile. Au Canada, elles sont émises par TC, qui stipule ce qui suitFootnote 14 :
La conformité aux consignes de navigabilité est essentielle à la navigabilité. En vertu de l'article 605.84 du RAC [Règlement de l'aviation canadien], tout propriétaire d'aéronef a la responsabilité de s'assurer que son aéronef ne décolle pas si une consigne de navigabilité n'est pas respectée à l'égard de l'aéronef, du ou des moteurs ou hélices ou de toute autre pièce d'équipement de l'aéronef […] En cas de non-conformité à une consigne de navigabilité, l'autorité de vol n'est pas en vigueur, et l'aéronef n'est pas considéré comme étant en état de navigabilité.
L'autorité de vol s'appliquant à l'avion en cause était le certificat de navigabilité.
Il incombe à l'exploitant d'examiner et d'évaluer les CN. Toutes les CN liées aux aéronefs ou aux composants, qu'elles demandent des mesures uniques, répétitives ou finales, sont entrées dans le logiciel du programme de maintenance de l'entreprise. L'exploitant élabore ensuite des procédures et des mesures de maintenance, et effectue les travaux sur l'aéronef.
Le BST a examiné les dossiers de l'avion en cause pour la période du 8 décembre 2008 au 20 août 2011. Une liste des CN qui s'appliquent à l'avion en cause a été récupérée du site Web de TC. Cette liste a été comparée aux CN enregistrées dans les carnets de bord de l'avion, et toutes les CN pertinentes avaient été inscrites comme ayant été exécutées.
Une enquête subséquente a révélé que certaines des mesures obligatoires de 2 CN n'avaient pas été exécutées.
1.6.1.2 Consigne de navigabilité 2004-19-10
La consigne de navigabilité (CN) 2004-19-10 exige l'inspection des axes d'articulation intérieurs et extérieurs des pivots du stabilisateur pour s'assurer de l'absence de corrosion ou de fissuration. Une défaillance des axes d'articulation intérieurs et extérieurs pourrait causer le dégagement des axes du joint, ce qui pourrait entraîner un déplacement intermittent de la structure du stabilisateur et, par conséquent, une perte de pilotabilité de l'avion.
Une vérification des dossiers effectuée par l'exploitant en septembre 2012 a permis d'établir que les exigences d'inspection de la CN 2004-19-10 n'avaient pas toutes été satisfaites. La procédure de service de maintenance créée pour se conformer à la CN ne contenait pas suffisamment d'information pour satisfaire à toutes les exigences de la CN.
Aucune anomalie pouvant indiquer des difficultés de pilotabilité de l'avion n'avait été consignée dans les carnets de bord. De même, il n'y avait aucune indication de problème de maîtrise en tangage dans l'enregistreur de données de vol (FDR) pour le vol en question.
1.6.1.3 Consigne de navigabilité 2006-12-23
La CN 2006-12-23 exige l'inspection du jeu du bord de fuite du servo-tab de profondeur. La CN permet un certain jeu, mais si l'inspection devait révéler un jeu supérieur à la tolérance permise, la réparation devait être effectuée avant la poursuite des vols.
Un point de maintenance différé est une défectuosité d'un aéronef qui n'a pas trait à la navigabilité et ne fait pas partie de la liste minimale d'équipements ou de la liste d'écarts de configuration. Une telle défectuosité peut être différée conformément à la procédure relative aux points de maintenance différés contenue dans le manuel de contrôle de la maintenanceFootnote 15. Les points d'entretien différés sont contrôlés au moyen de cartes numérotées consécutivement, et leur suivi est assuré dans le logiciel du programme de maintenance. Le jour de l'événement, l'avion avait 4 points de maintenance différés non réglés.
Le BST a découvert que 2 des points de maintenance différés concernaient la vérification périodique du jeu du bord de fuite du servo-tab de profondeur exigée par la CN 2006-12-23. Les 2 points de maintenance différés décrivaient un jeu supérieur aux tolérances permises par la CN et, par conséquent, n'auraient pas dû être différés. Les 2 points de maintenance différés ont été créés le 27 juillet 2011, avec des limites de rectification attribuées de 120 jours. La date d'échéance du 27 novembre 2011 n'était pas encore passée. Par conséquent, les points de maintenance différés étaient toujours ouverts.
Aucune anomalie pouvant signaler des difficultés de pilotabilité de l'avion n'avait été consignée dans les carnets de bord. De même, il n'y avait aucune indication de problème de maîtrise en tangage dans les données du FDR pour le vol en question.
1.6.2 Performance de l'aéronef
1.6.2.1 Masse et centre de gravité
Il a été établi que la masse et le centre de gravité de l'avion se trouvaient à l'intérieur des limites prescrites. L'avion était exploité conformément à ses limites de performance au départ de CYZF et pour l'atterrissage prévu à Resolute Bay (CYRB).
1.6.2.2 Limites de vitesse indiquée
La vitesse indiquée maximale pour la sortie du train d'atterrissage (équipé pour les pistes gravelées) est une vitesse indiquée de 180 nœuds (KIAS). Les limites de vitesse indiquée pour les volets sont les suivantes :
Volets 1 – 230 KIAS
Volets 5 – 225 KIAS
Volets 15 – 195 KIAS
Volets 25 – 190 KIAS
Volets 30 – 185 KIAS
Volets 40 – 170 KIAS
1.6.3 Dispositifs d'avertissement d'impact
L'avion était équipé d'un dispositif avertisseur de proximité du sol (GPWS) Mark II de Sundstrand Data Control IncFootnote 16. Il s'agit d'un GPWS de plus ancienne génération basé sur la technologie des années 1970. Ce système fournit des avertissements et des alertes sonores et visuels lorsque des conditions prescrites liées aux paramètres suivants existent :
le taux de descente barométrique;
la vitesse de rapprochement du relief;
la perte d'altitude après le décollage ou la remise des gaz;
la marge de franchissement du relief (autre qu'en configuration d'atterrissage);
la déviation sous l'alignement de descente.
Le système utilise l'information du radioaltimètre du commandant pour déterminer l'altitude de l'aéronef au-dessus du relief. Cette fonction ne fournit un avertissement que pour le relief directement sous l'aéronef, et non pas pour le relief devant l'aéronef. Lorsque le radioaltimètre du commandant ne fonctionne pas, tous les modes du GPWS ne fonctionnent pas. Lorsque l'aéronef est configuré pour l'atterrissage, la limite de tolérance des avertissements de sécurité est modifiée afin de prévenir les avertissements intempestifs quand l'aéronef approche du sol pour atterrir.
C-GNWN était configuré pour l'atterrissage lorsque la première alerte sonore du GPWS, « sink rate » [traduction : vitesse verticale de descente], a été émise, 4,1 secondes avant l'impact. À 2,6 secondes avant l'impact, l'alerte sonore « minimums…minimums » a été émise.
Si C-GNWN était demeuré en service, il aurait été équipé d'un GPWS de nouvelle génération dans le cadre de la prochaine visite CFootnote 17. Il restait encore environ 1890 heures de vol avant que cette visite ne soit requise. La rubrique 1.18.2.2 décrit la norme de GPWS amélioré.
1.6.4 Systèmes de navigation de C-GNWN
1.6.4.1 Système de navigation VHF
Lorsque les récepteurs fonctionnent, le système de navigation VHF fournit de l'information sur la position, et tout écart, de l'aéronef par rapport à une route de radiophare omnidirectionnel VHF (VOR) sélectionnée ou aux faisceaux d'approche d'alignement de piste et de descente.
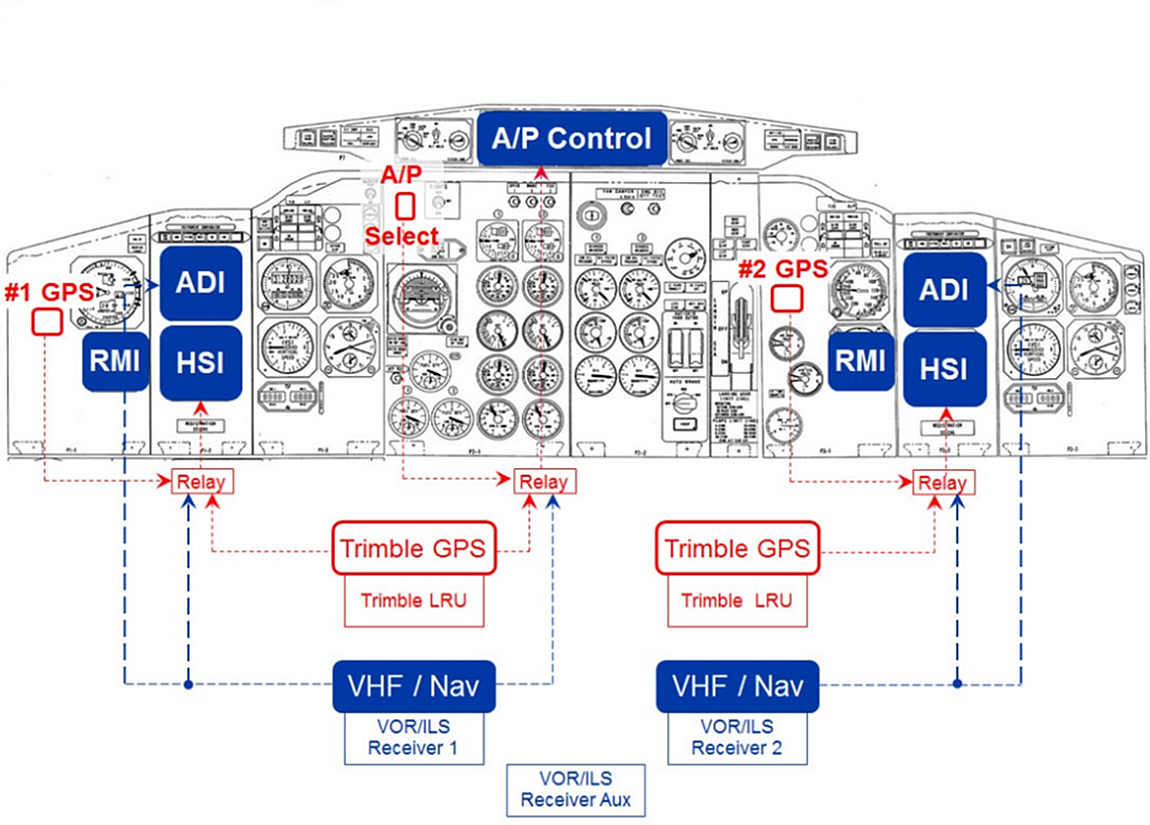
Le sélecteur de navigation VHF (VHF NAV)Footnote 18 était un sélecteur à bascule à 3 positions : CAPT ON AUX, NORMAL et F/O ON AUX. Lorsque le sélecteur VHF NAV est réglé à NORMAL, le récepteur de VHF NAV no 1 est commandé par le panneau de commande no 1, et fournit des signaux au système de pilote automatique, de même qu'au directeur de vol, à l'indicateur de situation horizontale (HSI), à l'indicateur directeur d'assiette (ADI) et à l'indicateur radiomagnétique (RMI) du commandant et au RMI du P/O. Le récepteur de VHF NAV no 2 est commandé par le panneau de commande no 2, et fournit des signaux au directeur de vol, au HSI, à l'ADI et au RMI du P/O ainsi qu'au RMI du commandant. Le récepteur de VHF NAV no 3 est un instrument de secours et n'est pas commandé.
1.6.4.2 Radiogoniomètres automatiques
L'avion était équipé de 2 radiogoniomètres automatiques (ADF). Un ADF permet de déterminer automatiquement les relèvements magnétiques et les gisements au radiophare non directionnel (NDB) sélectionné. Le récepteur no 1 utilise l'aiguille mince des RMI, et le récepteur no 2 utilise l'aiguille large. Le signal audio est entendu au moyen de la commande de récepteur ADF sur le panneau de sélection-écoute. Les aiguilles de relèvement de l'ADF n'affichent pas le bon relèvement magnétique lorsque les renseignements du compas sont perdus ou invalides. Les gisements sont indiqués par les aiguilles si le récepteur fonctionne.
1.6.4.3 Astrocompas
Les dossiers de C-GNWN indiquent que l'avion était équipé d'un astrocompas, et que celui-ci était rangé dans le poste de pilotage.
1.6.5 Systèmes de compas de C-GNWN
1.6.5.1 Généralités
Les systèmes de compas servent principalement à fournir au commandant et au P/O des renseignements relatifs au cap magnétique ou vrai de l'aéronef durant le vol. Les renseignements sur le cap sont affichés sur les roses compas du RMI et du HSI de l'aéronef.
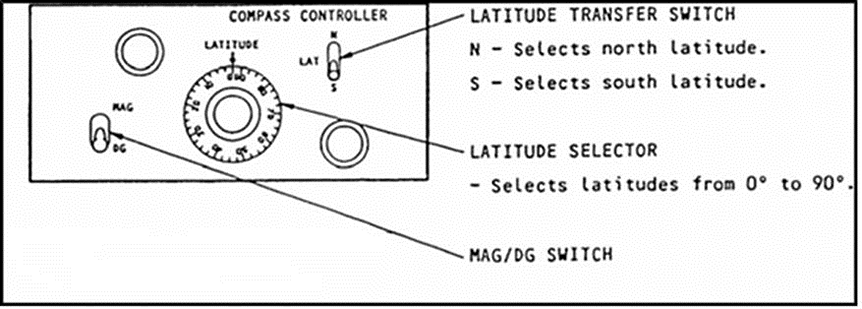
C-GNWN a été fabriqué et livré par Boeing au client initial avec 2 compas Sperry C-9, qui ne fonctionnaient qu'en mode magnétique asservi. L'avion a ensuite été acquis par un exploitant canadien en 1988, et des systèmes de compas Sperry C-11B de Western Avionics ont été installés. Le système de compas C-11B est un système gyrostabilisé qui tient lieu de conservateur de cap (DG) autonome ou de gyroscope asservi en mode magnétique, selon la position du sélecteur DG/MAG (magnétique) choisie par les pilotes sur le panneau de commande compas. Les systèmes de compas sont constitués de DG (rubrique 1.6.5.2), de sondes magnétométriques, de commandes compas, d'un sélecteur de transfert compas, de comparateurs d'instruments, de RMI et de HSI (annexe E).
La mise à niveau a fait en sorte que les compas pouvaient fonctionner en mode conservateur de cap autonome, ou en mode DG, ce qui est nécessaire dans l'espace aérien intérieur du Nord (NDA) canadien, où la proximité du pôle magnétique nord compromet la fiabilité des compas magnétiques. Aucun certificat de type supplémentaire n'est lié à cette modification; par conséquent, aucun supplément au manuel de vol de l'aéronef n'a été élaboré. La modification a été consignée au moyen d'un formulaire 337 de la Federal Aviation Admnistration (FAA) des États-UnisFootnote 19.
L'avion a ensuite été acquis par First Air. Le programme d'entretien des compas qui a été effectué par First Air est décrit en détail dans le document de planification de la maintenance D6-17594-1 de Boeing à la page 6.
Un examen des dossiers de maintenance de C-GNWN du 5 décembre 2010 à la date de l'événement a révélé une seule anomalie liée aux systèmes de compas, incluant les DG. Le 9 février 2011, il est inscrit que l'indicateur du compas no 2 ne fonctionnait pas, et il a été remplacé.
1.6.5.2 Conservateurs de cap
Le système de compas C-11B comprend le DG numéro de pièce 2588302-1, d'une précision de dérive gyroscopique corrigée pour la latitude de ± 1° par heureFootnote 20.
Un examen des dossiers de maintenance a révélé que les DG installés dans C-GNWN étaient désignés par le numéro de pièce 2588302-1 et les numéros de série 8084339 et 7123049. Le DG numéro de série 7123049 a fait l'objet d'une révision au centre de réparation de Honeywell à Ottawa en novembre 1992 et une autre fois en juin 1999, et avait été classé « aucun défaut décelé » en août 1999. On n'a pas trouvé de dossier de révision pour le DG numéro de série 8084339. Les DG n'ont pas été récupérés sur les lieux de l'écrasement.
1.6.5.3 Précession
Les pilotes doivent surveiller le fonctionnement en mode DG, parce que le taux de précession gyroscopique peut varier selon le système gyroscopique et les phénomènes de précession naturelle. Les phénomènes de précession gyroscopique qui sont les plus communément liés aux opérations aériennes sont de 2 types : la précession vraie et la précession apparente.
La précession vraie est produite dans le gyroscope et est causée par des imperfections mécaniques, comme des roulements usés ou endommagés. La tolérance de précession vraie des DG de l'avion C-GNWN était de ±1° par heure.
La précession apparente est le résultat de la fixité dans l'espace du gyroscope et de la rotation de la Terre par rapport à l'espace, et s'établit à 15,04° par heure. Deux aspects de la précession apparente sont le résultat de la rotation de la Terre (taux de rotation terrestreFootnote 21) et du transport d'un gyroscope au travers de méridiens convergents (taux de transport terrestreFootnote 22).
Tableau 6. Calculs du taux de rotation terrestre pour plusieurs positions le long de la trajectoire de FAB6560 avec le contrôleur de latitude réglé à 66°
UTC
Position de FAB6560
Taux de rotation terrestre (°/heure)
Taux de rotation terrestre compensé (°/heure)
Taux de rotation terrestre résiduel (°/heure)
14 h 58 min 57 s
64° N, 112°40′ W
13,52
13,74
0,22
66° N,
13,74
13,74
0,00
15 h 48 min 25 s
69°07′ N, 105°01′ W (CB)
14,05
13,74
−0,31
15 h 49 min 13 s
69°07′ N, 105°01′ W (CB)
14,05
13,74
−0,31
16 h 12
71°40′ N, 101°15′ W
14,28
13,74
−0,54
Tableau 7. Calculs du taux de transport terrestre pour 2 segments de la trajectoire de FAB6560
Début de la période
Fin de la période
Changement de longitude
(°/heure)
Latitude moyenne
Taux de transport terrestre
(°/heure)
UTC
Position
UTC
Position
14 h 58 min 57 s
64° N, 112°40′ W
15 h 48 min 25 s
69°07′ N, 105°01′ W
−9,28
66°34′ N
−8,51
15 h 49 min 13 s
69°07′ N, 105°01′ W
16 h 12
71°40′ N, 101°15′ W
−9,92
70°23′ N
−9,34
1.6.5.4 Indicateur de situation horizontale
Le HSI affiche la position et le cap de l'aéronef par rapport au nord vrai ou magnétique, le cap sélectionné, l'équipement de mesure de distance (DME), la déviation latérale par rapport à une route VOR ou à un alignement de piste sélectionné et la déviation verticale par rapport au centre du faisceau d'alignement de descente (annexe E). L'avion était équipé de 2 HSI : 1 sur le tableau de bord du commandant et l'autre sur le tableau de bord du P/O.
Plusieurs drapeaux avertisseurs incorporés au HSI permettent d'assurer une surveillance positive de plusieurs paramètres. Les drapeaux sont hors de vue en présence d'une tension de fonctionnement appropriée. Rien n'indique qu'il y avait des drapeaux affichés sur les HSI de l'équipage.
1.6.6 Système de pilote automatique
1.6.6.1 Généralités
L'avion était doté d'un système de pilote automatique SP-77 et de 2 systèmes directeurs de vol FD‑108. Ces systèmes ont été conçus pour fonctionner de façon indépendante et n'étaient pas intégrés. Chacun d'eux est commandé à partir du panneau de commande de mode situé sur l'auvent (photo 1).
Photo 1. Panneau de commande de mode du pilote automatique et du directeur de vol
Les commandes du directeur de vol du commandant de bord se trouvent du côté gauche du panneau de commande de mode, les commandes du pilote automatique sont au centre de ce panneau et celles du directeur de vol du P/O sont du côté droit. Il faut effectuer des sélections distinctes sur toutes les commandes pour configurer chaque système indépendant (annexe F). Les systèmes de pilote automatique et de directeur de vol utilisent des calculateurs analogiques et ne contiennent pas de mémoire rémanente.
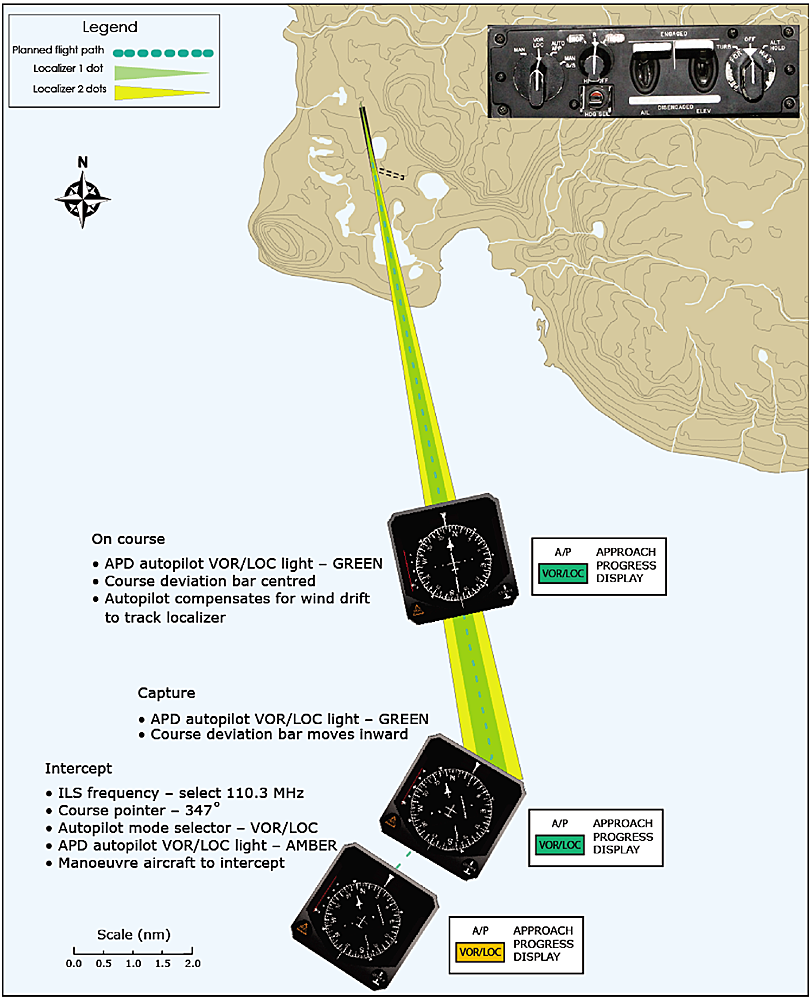
Le système de pilote automatique agit sur les axes de tangage et de roulis de l'aéronef et assure la stabilisation automatique de l'aéronef lors de l'activation des chaînes de tangage et de roulis. La sélection de différents modes permet aux pilotes de commander le pilote automatique afin de piloter l'aéronef sur une route VOR ou un alignement de piste sélectionné (mode VOR/LOC), ainsi que de faire des approches automatiques à des pistes équipées d'installations de système d'atterrissage aux instruments (ILS) (mode AUTO APP).
Les pilotes peuvent aussi piloter l'aéronef manuellement de façon normale à l'aide du volant de commande et du manche (pilotage transparent [CWS]) sans désactiver les axes de tangage et de roulis du système de pilote automatique. Les pilotes peuvent ensuite aider le système de pilote automatique à voler sur un cap ou une route sélectionnés. L'utilisation du CWS ne désactive pas les chaînes du système de pilote automatique. La conception originale du système de pilote automatique a été modifiée afin de permettre l'utilisation du guidage GPS pour les signaux de route acheminés au pilote automatique (rubrique 1.6.10).
Le système de pilote automatique peut être couplé soit au système radio VHF NAV, soit au système GPS. Pour coupler le pilote automatique au GPS, le sélecteur du pilote automatique est réglé à A/P ON GPSFootnote 23. S'il se produit quelque chose qui fait en sorte que le pilote automatique n'est plus couplé au GPS, comme la perte de signal GPS ou la sélection de NAV au tableau des voyants annonciateurs du GPS MD-41 du commandant, le pilote automatique va revenir à l'obtention de ses données de navigation du système radio VHF NAV. Cependant, le voyant A/P ON GPS reste allumé jusqu'à ce que le sélecteur du pilote automatique soit désactivé (non allumé).
La position des commandes du pilote automatique de l'équipage est indiquée à l'annexe G.
Par défaut, le pilote automatique et le directeur de vol du commandant obtiennent les renseignements d'orientation du récepteur VOR/ILS no 1, et le directeur de vol du P/O obtient ces renseignements du récepteur VOR/ILS no 2. Se reporter à la rubrique 1.6.10 pour obtenir des renseignements sur l'interface du GPS et du pilote automatique.
1.6.6.2 Pilotage transparent
Il est possible de manœuvrer l'avion en tangage et en roulis après l'activation du pilote automatique à l'aide du volant de commande et du manche. Les commandes manuelles effectuées par les pilotes au moyen du CWS sont les mêmes que celles requises pour le pilotage manuel. Il y a 2 niveaux de force requis pour déplacer le manche ou le volant de commande hors de la position centrale neutre afin d'effectuer des commandes de tangage ou de roulis.
Peu de force (4 livres dans l'axe de roulis et 5 livres dans l'axe de tangage) est requise pour déplacer le volant de commande hors de la position centrale neutre. Cette force est comparable à la force requise en pilotage manuel. Une fois cette résistance surmontée, les commandes de tangage ou de roulis sont proportionnelles à la force exercée sur le volant de commande ou le manche.
Afin d'empêcher la désactivation inopinée des différents sous-modes, il est nécessaire d'appliquer une force élevée (8 livres dans l'axe de roulis et environ 18 livres dans l'axe de tangage). La force requise pour déplacer le volant de commande ou le manche hors de la position neutre est augmentée. Si on désire revenir au CWS seulement (aucune commande automatique de cap, de route, de radio ou de tangage), on exerce une force supérieure à la force élevée décrite ci-dessus.
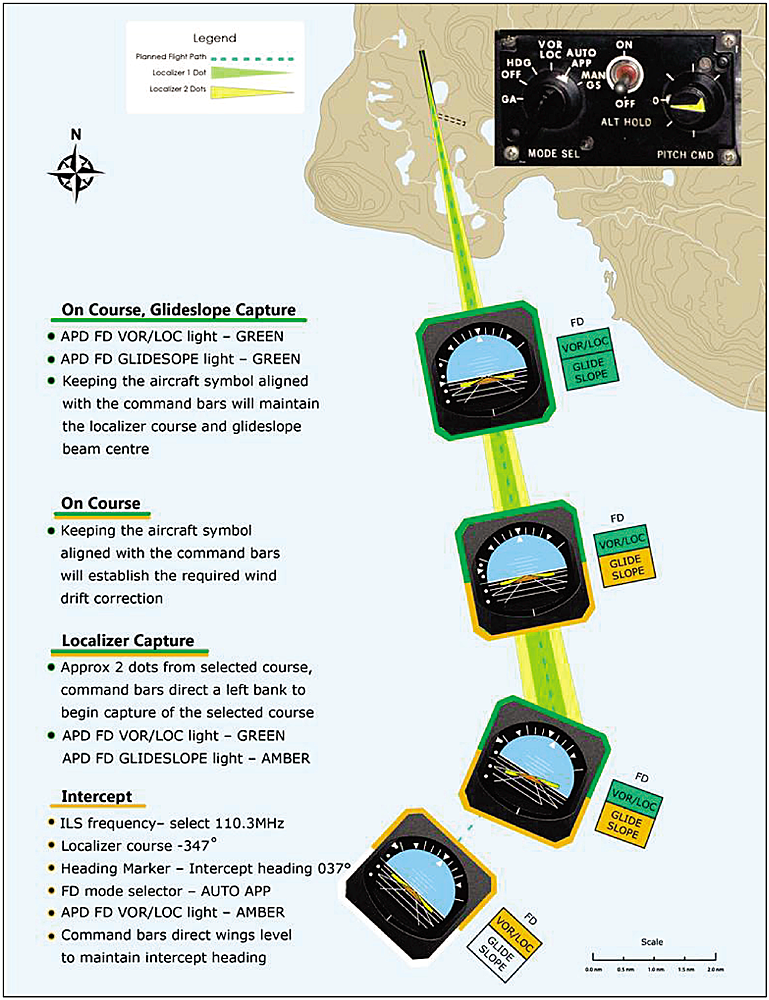
1.6.6.3 Conditions et limites pour la capture d'alignement de piste
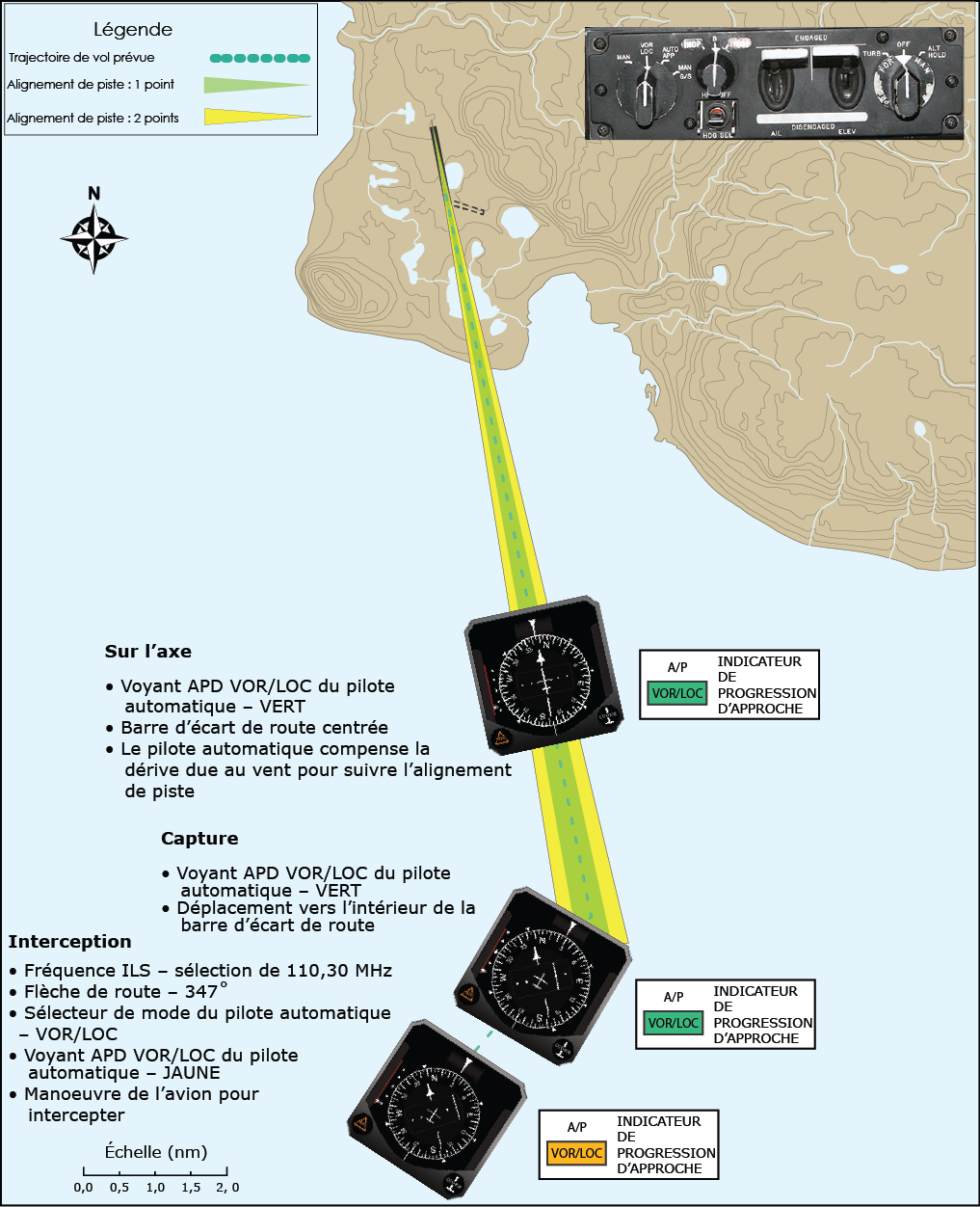
En mode VOR/LOC ou AUTO APP au sélecteur de mode du pilote automatique, le pilote automatique intercepte et capture l'alignement de piste, pourvu que l'angle d'interception se situe entre 10° et 90°Footnote 24.
En sous-mode de capture de LOC, la commande d'angle d'inclinaison maximal est limitée à 25°, et le taux de roulis est limité à 7° par seconde. Un capteur de faisceau latéral traite le signal d'écart de LOC. Ce mode utilise le signal d'écart de LOC, le taux de variation du signal d'écart de LOC et l'erreur de route (selon la route sélectionnée). Le pilote automatique amorce un virage vers le radiophare d'alignement de piste lorsque l'intensité du signal d'écart de LOC diminue sous 150 millivolts (mV) (2 points, comme indiqué par la barre d'écart de route).
La transition du pilote automatique au sous-mode d'alignement sur l'axe LOC se produit lorsque l'intensité du signal d'écart de LOC est inférieure à 80 mV (environ 1 point), le taux de variation du faisceau de croisement est inférieur à 2 mV par seconde et l'angle d'inclinaison est inférieur à 6°. Une fois en sous-mode d'alignement sur l'axe LOC, l'angle d'inclinaison maximal est limité à 8°. La limite de taux de roulis demeure à 7° par seconde. Autre que le changement de limite d'angle d'inclinaison, rien n'indique aux pilotes que le sous-mode du mode VOR/LOC du pilote automatique est passé de capture à l'alignement sur l'axe.
1.6.7 Système directeur de vol FD-108
1.6.7.1 Généralités
Les systèmes directeurs de vol fournissent aux pilotes des commandes visuelles pour maintenir l'avion sur des trajectoires de vol latérales et verticales présélectionnées. Il y a 2 systèmes indépendants, l'un pour le commandant de bord et l'autre pour le P/O.
Les ordinateurs des directeurs de vol reçoivent des signaux de différents systèmes de navigation selon le mode de fonctionnement sélectionné (annexe H). De plus, le système de référence d'assiette fournit des renseignements sur l'assiette en tangage et en roulis de l'avion. Les ordinateurs des directeurs de vol traitent ces signaux et génèrent des commandes d'assiette en tangage et en roulis pour maintenir la trajectoire de vol voulue. Les commandes en tangage et en roulis apparaissent sur l'indicateur directeur d'assiette (ADI). Le mode de fonctionnement armé ou de capture apparaît sur l'indicateur de progression d'approche (APD).
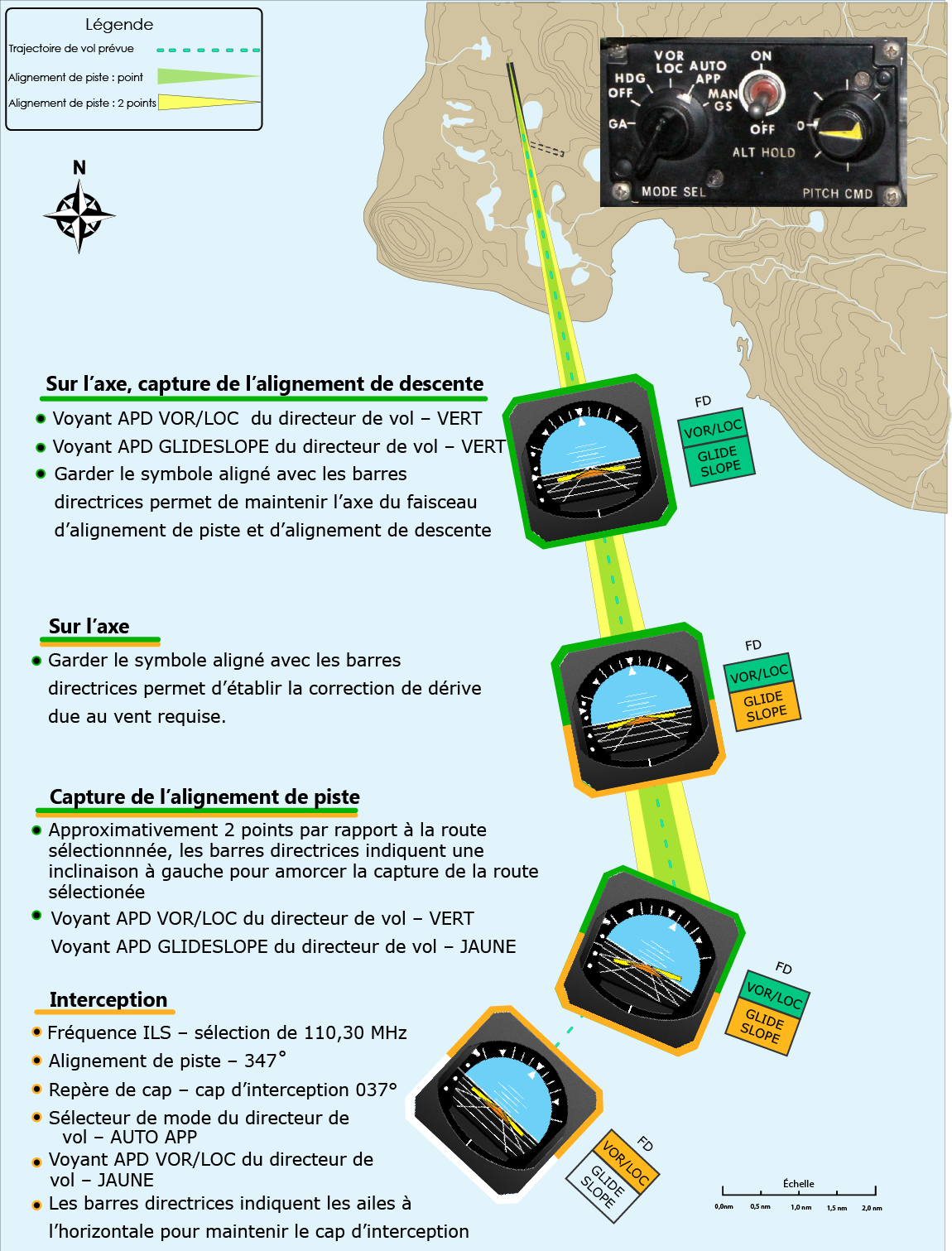
1.6.7.2 Limites de capture d'alignement de piste du directeur de vol
L'angle d'interception est limité à 30° (l'angle de cap par rapport à la route sélectionnée).
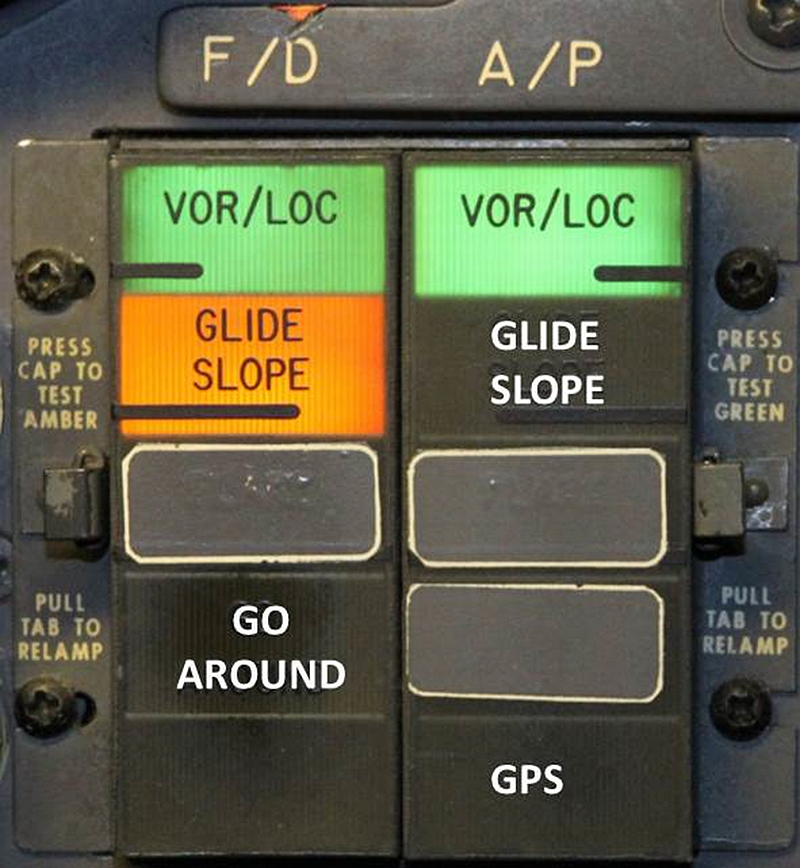
Lorsque le directeur de vol est en mode VOR/LOC et qu'il y a un signal VOR ou LOC valide, le voyant APD VOR/LOC du directeur de vol s'allume en vert dès la capture du LOC (écart de LOC inférieur à 2,5°). Dans les 90 secondes suivant la capture de LOC, si le signal d'écart de LOC excède la limite (2,5° pour l'alignement de piste), le directeur de vol passe de la capture de LOC à l'interception de LOC, et le voyant APD VOR/LOC du directeur de vol passe du vert au jaune.
1.6.8 Indicateur directeur d'assiette
Un ADI au tableau de bord de chaque pilote indique l'assiette en tangage et en roulis de l'avion, ainsi qu'un symbole fixe d'avion et les barres directrices de pilotage du directeur de vol (figure 2).
Figure 2. Exemple d'indicateur directeur d'assiette (ADI)
Indicateur d'inclinaison et échelle
Affichage de l'assiette
Flèche d'alignement de descente et échelle d'écart
Barres directrices du directeur de vol
Symbole d'avion
Symbole de radiophare d'alignement de piste et échelle d'écart
Des signaux distincts pour le tangage et le roulis activent les barres directrices du directeur de vol. Les barres directrices se déplacent simultanément pour afficher les directives intégrées de roulis et de tangage qui correspondent aux sélections de mode de roulis et de tangage du directeur de vol. Pour suivre les directives, l'avion est manœuvré de façon à aligner le plus parfaitement possible le symbole de l'aéronef avec les barres directrices.
Parce que les 2 directeurs de vol fonctionnent indépendamment l'un de l'autre, les barres directrices du commandant peuvent indiquer des directives différentes de celles du P/O, à moins de sélectionner un mode identique. Les barres directrices sont hors de vue lorsque le mode du directeur de vol est OFF ou que les signaux ne sont pas fiables.
En mode HDG SEL, les barres directrices affichent des directives pour atteindre et maintenir le cap sélectionné.
Lorsque les ordinateurs de pilotage du directeur de vol détectent que l'avion est à moins de 2,5° de l'axe du faisceau d'alignement de piste et que le mode VOR/LOC ou AUTO APP a été sélectionné, les barres directrices du directeur de vol indiquent les directives d'assiette en fonction de l'orientation de l'avion par rapport au faisceau d'alignement de piste. Une fois que l'avion est à plus de 2,5° de l'axe d'alignement de piste, le voyant VOR/LOC passe du vert au jaune pendant que le système passe du mode de capture au mode d'interception. En mode d'interception, les barres directrices donnent des directives pour atteindre et maintenir le cap sélectionné au HSI.
Des drapeaux avertisseurs incorporés à l'ADI assurent une surveillance positive de plusieurs paramètres. Les drapeaux sont hors de vue en présence de la tension de fonctionnement appropriée. Les pilotes n'ont pas mentionné la présence de drapeaux sur leurs ADI.
1.6.9 Voyants d'indicateur de progression d'approche
Les APD fournissent les indications de l'état armé ou de capture des systèmes de pilote automatique et de directeur de vol pour différents modes de fonctionnement. Il y a 2 APD : l'un sur le tableau de bord du commandant de bord et l'autre sur celui du P/O. Se reporter à l'annexe H pour obtenir la configuration et les fonctions des APD.
1.6.10 Système de positionnement mondial
L'avion était doté de 2 systèmes GPS Trimble TNL-8100. Ce type de système GPS n'enregistre aucune donnée de trajectoire. Le modèle TNL-8100 satisfait à la norme technique TSO C129 et est homologué pour la navigation en route, en région terminale et d'approche de non-précision aux instruments. Les systèmes GPS fournissent de l'information au pilote automatique et aux 2 HSI. Ils ne fournissent aucune information aux directeurs de vol.
Au cours de la période de décembre 2010 jusqu'au jour de l'événement, on a compté 5 inscriptions au dossier de maintenance liées au GPS. Deux de ces inscriptions concernaient des mises à jour de la base de données (5 juillet 2011 et 27 juillet 2011). Le 29 juin 2011, une panne de la référence de cap du GPS no 2 a été consignée. Des essais au sol ont révélé qu'il était en bon état de service. Le 30 juin 2011, le GPS ne fonctionnait pas au moment du départ. Le GPS no 2 a été remplacé, et une vérification a révélé qu'il était en bon état de service. Le 25 juillet 2011, le GPS no 1 n'acceptait pas de données d'entrée de vitesse vraie. Le GPS no 1 a été redémarré, vérifié et jugé en bon état de service.
Deux panneaux de commande et d'affichage (CDU) qui se trouvent sur la console centrale entre les pilotes commandent les 2 systèmes GPS. Le GPS no 1 est sur le côté du commandant de bord, et le GPS no 2 est sur le côté du P/O. Chaque CDU est doté d'un écran affichant l'information voulue, notamment la position de l'avion par rapport à la trajectoire voulue (photo 2). Dans le cas de la piste 35T de CYRB, l'axe du faisceau d'alignement de piste ILS est aligné de près avec la trajectoire d'approche finale de navigation de surface (RNAV). Par conséquent, l'écran du GPS peut fournir à l'équipage des renseignements sur la position par rapport à l'alignement de piste si l'approche RNAV est chargée dans le plan de vol.
Photo 2. Écran du panneau de commande et d'affichage (CDU) du TNL-8100, indiquant un écart à droite
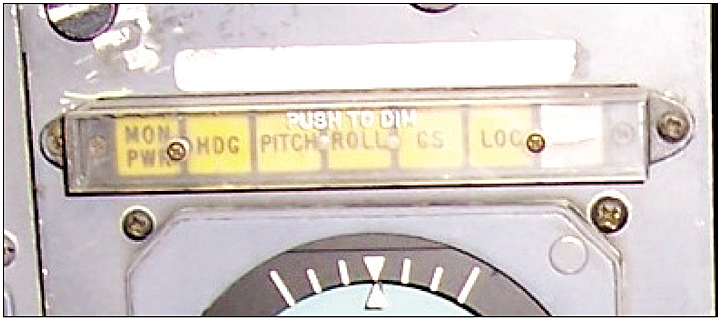
Chaque système est doté d'un tableau des voyants annonciateurs GPS MD-41. Le MD-41 permet au pilote de sélectionner l'affichage de l'information VHF NAV ou GPS sur la barre d'écart de route du HSI. Le MD-41 no 1 se trouve sur le tableau de bord du commandant (photo 3), et le MD-41 no 2 est situé sur le tableau de bord du P/O. À l'enfoncement de l'interrupteur NAV/GPS, le MD-41 affiche NAV en blanc ou GPS en vert, indiquant la source des données affichées au HSI.
Photo 3. CDU du système de positionnement mondial (GPS) no 1, panneau annonciateur MD-41 no 1 et sélecteur du pilote automatique (A/P SELECT)
Le voyant/bouton A/P SELECT se trouve au centre du tableau de bord, juste au-dessus de l'indicateur d'assiette de secours.
À la sélection du mode GPS du MD-41 no 1 et à l'enfoncement du voyant/bouton A/P SELECT, la mention A/P ON GPS s'allume en vert, et le système de pilote automatique reçoit l'information du GPS no 1 plutôt que des données radio VHF NAV. Le pilote automatique peut être déconnecté du GPS en désélectionnant le voyant/bouton A/P SELECT. La sélection du mode NAV du MD-41 no 1 retire les signaux GPS du pilote automatique, cependant le voyant A/P ON GPS demeure allumé.
Le GPS retourne automatiquement au mode TRUE lorsque les sélecteurs de commande compas MAG/DG sont réglés à DG.
1.6.11 Radiobalise de repérage d'urgence
L'avion était muni d'une radiobalise de repérage d'urgence (ELT) Honeywell Rescu 406AF. Lorsqu'elle est activée automatiquement à l'impact ou manuellement, l'ELT transmet un signal de détresse pour aider le personnel de recherche et sauvetage à détecter et à trouver l'appareil. L'ELT de 406 mégahertz (MHz) émet des données à codage numérique exclusif qui identifient l'aéronef sur lequel elle est installée.
1.7 Renseignements météorologiques
1.7.1 Altitude du plafond nuageux
Les couches nuageuses sont décrites d'après la somme des quantités de couches observées à partir de la surface. Les quantités de couches sont signalées en huitièmes (octas) de ciel couvert. FEW représente une épaisseur cumulative de plus de 0 jusqu'à 2/8, SCT une épaisseur cumulative de 3/8 à 4/8, BKN une épaisseur cumulative de 5/8 à 8/8, et OVC une épaisseur cumulative de 8/8. On dit qu'il existe un plafond nuageux à l'altitude de la première couche signalée dont le symbole de couverture est BKN ou OVCFootnote 25.
1.7.2 Conditions météorologiques à Yellowknife au départ
Le message d'observation météorologique régulière pour l'aviation (METAR) de 14 h pour CYZF indiquait : vent du 090 °V à 11 nœuds, visibilité de 15 milles terrestres (sm) sous de faibles averses de pluie, nuages fragmentés à 5500 pieds au-dessus du sol (agl), nuages fragmentés à 8000 pieds agl, nuages fragmentés à 11 000 pieds agl, température de 9 °C, point de rosée de 7 °C et calage altimétrique de 29,87 pouces de mercure (po Hg).
1.7.3 Bulletin météorologique pour Resolute Bay émise avant le départ
La région de Resolute Bay était soumise à un creux barométrique qui, à 7 h, s'étendait vers le sud-est depuis un système dépressionnaire centré au 80° N, 115° W. Le creux se déplaçait vers le nord-est à 10 nœuds. Les prévisions pour la région indiquaient des nuages fragmentés à partir de 2500 pieds au-dessus du niveau de la mer (asl) jusqu'à 14 000 pieds asl et une visibilité supérieure à 6 sm. Elles indiquaient par endroits (de 25 % à 50 % de la région) une visibilité de 4 à 6 sm avec pluie de faible intensité et de la brume, ainsi que des plafonds nuageux de 600 à 1500 pieds agl. On prévoyait aussi des plafonds localisés aussi bas que 200 pieds agl, et une visibilité aussi faible que 1 sm.
Le METAR de 14 h pour Resolute Bay (CYRB) indiquait : vent du 160 °V à 14 nœuds, visibilité de 15 sm, nuages fragmentés à 900 pieds agl, couvert nuageux à 7000 pieds agl, température de 7 °C, point de rosée de 6 °C et calage altimétrique de 29,79 po Hg.
Une prévision d'aérodrome (TAF) pour CYRB a été émise à 11 h 38. Les prévisions météorologiques pour 16 h 45 étaient les suivantes : vent du 150 °V à 15 nœuds, visibilité supérieure à 6 sm avec pluie de faible intensité, nuages épars à 500 pieds agl, couvert nuageux à 1200 pieds agl; temporairement entre 12 h et 20 h : visibilité de 2 sm avec pluie de faible intensité et brume, couvert nuageux à 500 pieds agl et 30 % de probabilité de couvert nuageux à 400 pieds agl. À 13 h 44, la TAF a été modifiée, et pour la période de l'arrivée, elle indiquait : vent du 170 °V à 12 nœuds, visibilité supérieure à 6 sm, nuages épars à 800 pieds agl, couvert nuageux à 7000 pieds agl; temporairement entre 13 h et 20 h : visibilité de 2 sm avec pluie de faible intensité et brume, couvert nuageux à 800 pieds agl et 30 % de probabilité de couvert nuageux à 400 pieds agl.
1.7.4 Bulletin météorologique pour Resolute Bay émis pendant que FAB6560 était en route
Un message d'observation météorologique spéciale d'aérodrome (SPECI) émis à 14 h 34 pour CYRB indiquait : vent du 170 °V à 16 nœuds, visibilité de 15 sm dans des conditions de bruine légère et couvert nuageux à 500 pieds agl. Un autre SPECI, émis à 14 h 50 et fourni à l'équipage par un agent d'opérations de l'entreprise à 14 h 55, indiquait : vent du 170 °V à 13 nœuds, visibilité de 5/8 sm dans des conditions de bruine légère et de brume, visibilité verticale de 200 pieds; remarque : 8 octas de brouillard.
À 14 h 51, la TAF pour CYRB a été modifiée une deuxième fois et, pour la période de l'arrivée, elle indiquait : vent du 170 °V à 15 nœuds, visibilité supérieure à 6 sm, nuages épars à 500 pieds agl, couvert nuageux à 7000 pieds agl; temporairement entre 14 h et 20 h : visibilité de 2 sm avec pluie de faible intensité et brume, couvert nuageux à 500 pieds agl.
Le METAR de 15 h pour CYRB, fourni à l'équipage par un agent d'opérations de l'entreprise à 15 h 10, indiquait : vent du 180 °V à 16 nœuds, visibilité de ½ sm, portée visuelle de pisteFootnote 26 pour la piste 35 de 2200 pieds dans des conditions de bruine légère et de brouillard, visibilité verticale de 200 pieds, température de 6 °C, point de rosée de 6 °C, calage altimétrique de 29,79 po Hg; remarque : 8 octas de brouillard. Un autre SPECI émis à 15 h 33 indiquait : vent du 170 °V à 8 nœuds, visibilité de 5 sm dans des conditions de bruine légère et de brume et couvert nuageux à 600 pieds.
Le METAR de 16 h, fourni à l'équipage par NAV CANADA à 16 h 09, indiquait : vent du 180 °V à 8 nœuds, visibilité de 10 sm dans des conditions de bruine légère, couvert nuageux à 700 pieds agl, température de 6,3 °C, point de rosée de 6 °C et calage altimétrique de 29,81 po Hg. Aucune autre observation météorologique n'a été fournie à l'équipage.
1.7.5 Observation météorologique à Resolute Bay émise après l'accident
Un SPECI émis à 16 h 49 pour CYRB indiquait : vent du 180 °V à 13 nœuds, visibilité de 5 sm dans des conditions de bruine légère et de brume et couvert nuageux à 300 pieds agl.
Il existe des critères en ce qui concerne l'émission de rapports météorologiques SPECI pour transmettre des changements relatifs aux conditions météorologiques observées précédemment. Dans le cas des changements de visibilité, l'émission d'un SPECI n'est requise que lorsque la visibilité devient inférieure à 3 milles. L'émission d'un SPECI est requise lorsque le plafond nuageux baisse sous 500 pieds, et ensuite par tranche de 100 piedsFootnote 27.
1.7.6 Vents en altitude
Le plan de vol exploitation de FAB6560 et les prévisions de vents en altitude indiquaient que l'avion serait soumis à des vents arrière augmentant d'intensité entre Cambridge Bay et CYRB. Le plan de vol exploitation indiquait un vent arrière de 63 nœuds au début de la descente.
1.7.7 Renseignements météorologiques reçus par l'équipage
Les agents d'opérations de l'entreprise préparent le plan de vol exploitation, qui comprend les renseignements météorologiques et les NOTAM (avis aux aviateurs), et le mettent sur un serveur de protocole de transfert de fichier (FTP) de l'entreprise pour que l'équipage le télécharge. Le plan de vol exploitation de FAB6560, incluant les renseignements météorologiques et les NOTAM, n'a pas été récupéré sur les lieux de l'écrasement, et des copies électroniques de ces renseignements ont été supprimées automatiquement du système informatique de l'entrepriseFootnote 28. Il est presque certain que le plan de vol exploitation émis par l'agent d'opérations de First Air à 10 h 35 comportait les renseignements des METAR et des TAF en vigueur pour CYRB. Il y avait un terminal d'ordinateur dans la salle des opérations de l'entreprise à CYZF permettant d'accéder aux renseignements météorologiques de NAV CANADA, et l'équipage aurait pu obtenir par l'intermédiaire de celui-ci les renseignements météorologiques émis par la suite.
1.8 Aides à la navigation
1.8.1 Aides à la navigation
Les aides à la navigation (NAVAID) desservant Resolute Bay (CYRB) comprenaient le radiophare non directionnel de Resolute Bay (NDB RB), le radiophare omnidirectionnel à très haute fréquence (VHF) d'YRB (VOR YRB) avec l'équipement de mesure de distance (DME) connexe (n'est pas utilisé pour les procédures d'approche aux instruments de CYRB) et le système d'atterrissage aux instruments (ILS) IRBFootnote 29 avec le DME connexe. L'aéroport est desservi par une approche ILS/DME pour la piste 35T (annexe C). De plus, les pistes 17T (degrés vrais) et 35T sont desservies par des approches de navigation de surface (RNAV) qui reposent sur le système mondial de navigation par satellite (GNSS) (annexe B). Il n'y avait aucune indication de panne des NAVAID au moment de l'approche de FAB6560.
NAV CANADA a effectué une vérification en vol de la voie aérienne du NDB RB en novembre 2010, laquelle a révélé que la précision du NDB était dans une plage de ±5° près de l'endroit où les compas de l'avion effectuant le vol FAB6560 ont été réinitialisés. Transports Canada (TC) exige le maintien des systèmes NDB à l'intérieur d'une certaine plage de précisionFootnote 30 :
Les systèmes NDB sont vérifiés en vol afin d'assurer une précision à au moins 5° près pour une approche et à au moins 10° près en route. Toutefois, des erreurs beaucoup plus grandes sont possibles par suite des perturbations de propagation causées par le lever ou le coucher du soleil, les signaux réfléchis par le haut relief, la réfraction de signaux traversant les rivages à moins de 30° et les orages électriques.
Un autre aéronef a réussi une approche ILS/DME sur la piste 35T environ 20 minutes après l'accident. Par mesure de précaution, NAV CANADA a effectué une vérification en vol de l'ILS le 22 août 2011. Le système a été déclaré en bon état de service.
1.8.2 Interférence possible avec le fonctionnement du système d'atterrissage aux instruments de Resolute Bay
La question de savoir si l'activité militaire à l'aérodrome CYRB, ou toute autre aide à la navigation et d'approche, aurait pu produire de l'interférence avec le fonctionnement du système d'atterrissage aux instruments (ILS) de CYRB a fait l'objet d'une enquête.
Le signal du radiophare d'alignement de piste ILS est continuellement mesuré et surveillé, et est coupé si l'émetteur est hors des limites de tolérance. Les données de surveillance de l'ILS de la piste 35T de Resolute Bay ont été enregistrées, et elles indiquent que le signal de guidage était stable et ne subissait aucune interférence. L'avionique de bord distingue aussi les signaux non désirés et filtre le bruit non lié au guidage, en plus de déclencher un drapeau avertisseur si l'intensité du signal n'est pas suffisante. Il n'y a eu aucune mention par l'équipage d'affichage de drapeaux avertisseurs par l'avionique de bord.
D'autres NAVAID, dont le VOR, émettent sur une fréquence déterminée de façon à pouvoir fonctionner en harmonie avec la fréquence de l'ILS. Toute interférence provenant d'un VOR n'aurait pas de signal de guidage, entraînant ainsi l'affichage d'un drapeau avertisseur par l'avionique de bord. En outre, elle ne présenterait pas d'indicatif en code Morse. Les fréquences radar sont hors de la plage de l'ILS et seraient rejetées par les filtres de l'avionique de bord. Elles ne peuvent pas fournir de signal de guidage et n'ont pas d'indicatif en code Morse. De plus, la nature pulsée du signal ne peut pas désactiver un drapeau avertisseur de l'avionique.
1.9 Communications
1.9.1 Généralités
Le premier contact entre le vol FAB6560 et l'aérogare de Resolute Bay (CYRB) a eu lieu à 16 h 26 min 27 s, alors que le vol était à 80 milles marins (nm) de CYRB. L'intelligibilité était d'abord insatisfaisante, et des communications bidirectionnelles de qualité satisfaisante ont seulement été établies à 16 h 29 min 49 s (à 56 nm de CYRB). Une fois les communications bidirectionnelles établies, le vol FAB6560 a pu communiquer efficacement avec l'aérogare et la tour de CYRB. Les sous-sections suivantes décrivent les activités liées aux communications qui n'ont pas été abordées précédemment à la rubrique 1.1.
1.9.2 Arrivée et approche de KBA909
Un deuxième aéronef volant selon les règles de vol aux instruments (IFR), KBA909, s'approchait de CYRB du sud-est. Le premier contact entre KBA909 et la tour de CYRB a eu lieu à 16 h 39 min 49 s. Les données radar indiquent que le vol KBA909 a pénétré dans la zone de contrôle de classe DFootnote 31 vers 16 h 40 min 55 s. L'avion se déplaçait alors à 158 nœuds en direction de l'aéroport à une altitude de 2200 pieds au-dessus du niveau de la mer (asl). À ce moment, le vol FAB6560 était à 2,4 nm de l'aéroport, voyageant à 183 nœuds, en descente à 1100 pieds asl. À 16 h 42 min 25 s, KBA909 s'est rapporté à 7 milles au sud-est de l'aérodrome. KBA909 s'est rapporté au-dessus du radiophare de RB à 16 h 45 min 5 s, au moment d'amorcer la procédure d'approche ILS (système d'atterrissage aux instruments) en alignement arrière vers la piste 17T (degrés vrais). Ce rapport a été effectué environ 3 minutes après la dernière transmission du vol FAB6560. KBA909 a ensuite interrompu son approche, puis a effectué une approche ILS vers la piste 35T et a atterri à 17 h 08.
1.9.3 Recherches par moyens de communication du vol FAB6560
Pour réduire les risques d'incompatibilité de trafic avec un aéronef en panne radio, le paragraphe 611.1E du MANOPS ATC de NAV CANADA demande aux contrôleurs de suspendre ou de limiter, dans la mesure nécessaire, les mouvements des autres aéronefs autour de l'aéroport de destination pendant 30 minutes après la dernière des heures suivantesFootnote 32 :
L'heure d'arrivée prévue communiquée par l'aéronef.
L'heure d'arrivée prévue calculée par l'unité IFR.
La durée prévue en route incluse dans le plan de vol.
La dernière heure d'autorisation d'approche prévue dont l'aéronef a accusé réception.
En cas d'accusé de réception d'une autorisation d'approche, l'heure à laquelle vous savez ou estimez que l'aéronef a commencé l'approche.
Le vol FAB6560 ne se posant pas et ne pouvant pas être contacté, le contrôleur tour a conclu que la communication avec l'avion avait été perdue, et que l'équipage effectuait vraisemblablement une approche interrompue. Cependant, les exigences du paragraphe 611.1E n'ont pas été respectées.
Le paragraphe 624.1 du MANOPS ATC de NAV CANADAFootnote 33 demande aux contrôleurs de transmettre au centre conjoint de coordination de sauvetage (JRCC) concerné les renseignements sur un aéronef IFR ou un aéronef effectuant un vol VFR contrôlé (CVFR) qui se trouve dans l'une des phases suivantes : incertitude, alerte ou détresse. Une phase d'alerte est un terme du domaine de la recherche et sauvetage qui fait référence à une situation où l'aéronef a été autorisé à atterrir et n'atterrit pas dans les 5 minutes suivant l'heure d'atterrissage prévue, et où les communications n'ont pas été rétablies avec cet aéronefFootnote 34. La tour de CYRB était l'organisme de contrôle à ce moment, et il lui incombait d'avertir le JRCC que FAB6560 se trouvait dans une phase d'alerte.
À 16 h 45 min 20 s, environ 3 minutes après la dernière transmission du vol FAB6560, le contrôleur tour de CYRB lui a transmis un appel demandant sa position. Une fois de plus à 16 h 46 min 34 s, et encore à 16 h 48 min 14 s, le contrôleur tour a tenté de communiquer avec le vol FAB6560, avant de conclure que l'avion avait probablement effectué une approche interrompue et que la communication avait été perdue. Pendant ce temps, le contrôleur sol de CYRB a communiqué avec le poste d'incendie afin de lui demander de se préparer pour une urgence possible.
À 16 h 47, le contrôleur sol de CYRB a communiqué avec l'opérateur de la station radio d'aérodrome communautaire (CARS) de CYRB pour lui demander des renseignements sur le vol FAB6560. L'opérateur de la CARS lui a dit ne pas avoir reçu d'appel de FAB6560 depuis un certain temps. À peu près au même moment, la tour de CYRB a envoyé un véhicule pour parcourir l'aérodrome et les approches des pistes afin de voir s'il y avait des signes de l'avion. Rien n'a été signalé.
À 16 h 54 min 50 s, le contrôleur sol de CYRB a communiqué avec l'opérateur de la radio Arctique de NAV CANADA à North Bay pour s'informer du vol FAB6560, et on lui a répondu que le vol avait été retardé. L'opérateur radio de la région de l'Arctique n'a pas noté d'où provenait ce renseignement. À 16 h 57 min 2 s, le contrôleur sol de CYRB a appelé le service de fret de First Air afin de déterminer la raison du retard.
À 16 h 57 min 56 s, l'opérateur radio de la région de l'Arctique a communiqué avec le centre de contrôle régional (ACC) d'Edmonton de NAV CANADA à la recherche d'information sur le vol FAB6560. Edmonton a répondu que l'heure d'arrivée prévue (ETA) du vol était 16 h 45, et que le système n'indiquait pas l'arrivée du vol.
À 17 h 06, on a demandé au poste d'incendie de veiller à ce que les camions d'incendie soient prêts à intervenir à l'aérodrome. À 17 h 14, le contrôleur tour de CYRB a communiqué avec la sous-unité de plans de vol de l'ACC d'Edmonton de NAV CANADA et l'a informée que le vol FAB6560 avait été autorisé à atterrir et qu'il n'y avait eu aucune autre communication avec l'avion. L'ACC d'Edmonton de NAV CANADA a dit qu'il communiquerait avec First Air afin de déterminer si l'entreprise disposait d'information indiquant que l'avion avait effectué une approche interrompue. Lorsque First Air a avisé l'ACC d'Edmonton de NAV CANADA qu'elle ne disposait pas d'information relative à une approche interrompue possible effectuée par le vol FAB6560, le contrôleur de l'ACC d'Edmonton de NAV CANADA a appelé le JRCC de Trenton pour signaler l'avion manquant.
À 17 h 19, à mesure que les nuages masquant la colline se dégageaient quelque peu, le personnel à proximité de la tour de contrôle de CYRB a aperçu de la fumée et des flammes sur un relief plus élevé à l'est de la piste. Le contrôleur tour de CYRB a immédiatement déclaré une situation d'urgence et a envoyé les véhicules d'incendie sur les lieux par la seule route disponible, soit un chemin passant au nord de la piste, puis montant sur la colline où se situait le VOR. Tous les organismes requis ont ensuite été informés de l'accident.
Pendant les recherches par moyens de communication du vol FAB6560, certains des organismes qui doivent normalement être avisés qu'un avion se trouve dans une phase d'alerte pour la recherche et le sauvetage ont été informés de l'avion manquant. Cependant, la tour de contrôle militaire à CYRB n'a pas déclaré officiellement l'existence d'une phase d'alerte. Les contrôleurs militaires n'avaient pas de liste de vérifications en cas d'urgence pour vérifier les mesures appropriées.
1.10 Renseignements sur l'aérodrome
1.10.1 Aéroport de Resolute Bay
L'administration aéroportuaire du Nunavut est le propriétaire et l'exploitant de l'aéroport de Resolute Bay (CYRB). Il y a 1 piste en service : la piste 17/35, orientée au 167/347 °V. Une deuxième piste, abandonnée, est indiquée dans les publications d'information de vol. La piste 35T (degrés vrais) mesure 6504 pieds de longueur sur 197 pieds de largeur, et sa surface est revêtue de gravier. La pente longitudinale à partir du seuil de la piste 35T est ascendante à 0,93 % dans les 4700 premiers pieds, puis elle est descendante à 0,40 % pour les 1800 derniers pieds de la piste. L'aéroport se trouve à une altitude de 222 pieds au-dessus du niveau de la mer (asl), et l'altitude de la zone de toucher des roues de la piste 35T est de 197 pieds asl. La piste 35T est dotée d'un balisage lumineux d'approche courte simplifiée à haute intensité avec feux indicateurs d'alignement de piste, de feux de seuil et d'extrémité de piste ainsi que de feux de bord de piste à haute intensité, pouvant tous être réglés à 5 différentes intensités. Durant l'approche du vol FAB6560, les feux d'approche et de piste étaient réglés à 5, soit l'intensité maximale.
Il n'y a pas de capacité de sauvetage et de lutte contre les incendies d'aéronef (SLIA) à CYRB. Cependant, le plan d'intervention d'urgence de l'aéroport mentionne les ressources et les responsabilités du personnel qui intervient dans différentes situations d'urgence. Les rôles de l'opérateur de la CARS, du surveillant de la CARS, de l'agent administratif principal, du représentant principal de l'aéroport, de la Gendarmerie royale du Canada (GRC), du corps de pompiers volontaires du village, du chef du service d'incendie, des services médicaux et de l'ambulance du village, du représentant de l'entreprise de transport aérien et du directeur des programmes de transport sont indiqués avec les mesures requises et les diagrammes d'acheminement de l'information. Le corps de pompiers volontaires du village est en mesure de lutter contre les incendies de bâtiment, mais n'a pas accès à de la mousse pour lutter contre les incendies d'aéronef et n'est pas formé en sauvetage et lutte contre les incendies d'aéronef.
1.10.2 Ressources supplémentaires de l'opération Nanook
Dans le cadre de l'opération Nanook, les Forces canadiennes avaient établi à l'aéroport un poste d'incendie entièrement pourvu en personnel et doté de 2 camions d'incendie Oshkosh TA 1500C, transportant chacun 750 litres de mousse, 6000 litres d'eau, 225 kilogrammes de poudre extinctrice, ainsi que des extincteurs portatifs et des appareils respiratoires autonomes. On avait aussi établi un centre médical entièrement pourvu en personnel à l'aéroport. Il y avait plusieurs hélicoptères militaires (Griffon et Sea King) et un hélicoptère de la Garde côtière à CYRB au moment de l'accident.
1.10.3 Stations radio d'aérodrome communautaire
Des stations radio d'aérodrome communautaire (CARS) fournissent des services météorologiques à l'aviation et de communication à des emplacements désignés au Yukon, dans les Territoires du Nord-Ouest, au Nunavut et dans le Nord du Québec. Les CARS sont dotées d'instruments météorologiques permettant de surveiller et d'enregistrer des observations météorologiques de surface pour l'aviation et de l'équipement de communication en vue de fournir des renseignements opérationnels aux pilotes. Elles sont exploitées par des observateurs/communicateurs, que l'on recrute habituellement dans la région.
CYRB est desservi par une CARS, située dans l'aérogare. Lorsque l'événement s'est produit, la CARS était dotée du personnel requis, soit un observateur/communicateur, qui continuait d'effectuer le programme d'observations météorologiques et d'accomplir les autres tâches normales de la CARS, à l'exception de la communication de renseignements opérationnels aux aéronefs. L'unité de contrôle de la circulation aérienne (ATC) des Forces canadiennes, établie pour appuyer l'opération Nanook, avait pris en charge cette tâche.
Les observations météorologiques effectuées par le personnel de la CARS sont transmises par ordinateur à Environnement Canada et à NAV CANADA.
1.11 Enregistreurs de bord
1.11.1 Généralités
L'enregistreur de données de vol (FDR) et l'enregistreur de conversations de poste de pilotage (CVR) ont été trouvés dans la zone de débris le jour de l'accident et ont été transportés au Laboratoire du BST le 21 août 2011.
1.11.2 Enregistreur de données de vol
L'avion était équipé d'un FDR à semi-conducteurs Honeywell (modèle SSUFDR, numéro de pièce 980 4120 RQUS). On a réussi à télécharger les données du module de mémoire.
Le FDR a enregistré 24 paramètres en tout. Il contenait approximativement 27 heures de données de vol, incluant le vol en cause et les 17 vols précédents. Les annexes I à N présentent des segments des différentes étapes du vol. Les annexes O et P présentent la trajectoire de vol par rapport à l'alignement de descente et à l'alignement de piste, selon les données radar et du FDR.
1.11.2.1 Divergence de données de l'enregistreur des données de vol
On a noté une divergence de données durant le décollage du vol menant à l'accident. Aucune des valeurs des paramètres enregistrés ne correspondait au comportement prévu. Peu après la mise en palier à l'altitude de croisière de 31 000 pieds, il y a eu une brusque interruption dans les données; elles semblent ensuite être redevenues valides et le demeurer jusqu'à l'impact. La durée de l'enregistrement de données invalides était d'environ 19 minutes. Trois des vols précédents contenaient aussi des anomalies semblables en début de vol. Toutes les anomalies présentaient les mêmes caractéristiques, notamment, qu'elles étaient présentes à compter du démarrage et que tous les paramètres étaient touchés. Le seul point commun entre les parties de données invalides est que ces données invalides ont commencé au démarrage. Le temps pendant lequel chaque ensemble de données est demeuré invalide était différent. Dans le cas des 3 autres vols présentant des données anormales au démarrage, la durée variait de 10 minutes à plus de 20 minutes.
1.11.2.2 Directives en matière de maintenance des enregistreurs de données de vol
L'Appendice C de la Norme 625 du Règlement de l'aviation canadien (RAC) exige une vérification de la corrélation des donnéesFootnote 35. Le paragraphe 17 renvoie également le lecteur au document de l'EUROCAEFootnote 36 ED-55Footnote 37, qui fait état de directives sur la maintenance des FDR, y compris les vérifications de la corrélation. L'objectif de la vérification de la corrélation des FDR est de s'assurer que l'ensemble des paramètres requis est enregistré et est de qualité acceptable.
Le document ED-55 demande à ce que le personnel de la maintenance rejoue au moins 15 minutes de données de vol. First Air procédait à ses propres vérifications de la corrélation des FDR, conformément à l'Appendice C de la Norme 625 du RAC. Le BST a examiné les téléchargements de données effectués par First Air dans le cadre de vérifications de la corrélation antérieures. Ces téléchargements indiquent que le problème d'enregistrement de données du FDR en cause existait depuis au moins le mois de mars 2008, mais n'a pas été détecté en raison du fait que l'examen des données exigé par le document ED-55 est restreint (15 minutes).
En juin 2007, le BST a donné une séance d'information sur les problèmes relatifs aux enregistreurs de bord lors d'un atelier de normalisation de l'avionique de Transports Canada (TC). La séance d'information abordait des enjeux liés aux vérifications de la corrélation et à la maintenance des FDR. TC a publié un article intitulé « Problèmes de données FDR et CVR découverts pendant des enquêtes du BST » dans Sécurité aérienne – Nouvelles numéro 3/2008Footnote 38. Cet article avait pour but d'inciter les exploitants et les responsables de la maintenance de réexaminer leurs dernières vérifications des enregistreurs de bord.
Le BST continue de découvrir des problèmes avec les données des FDR, et certains de ces problèmes auraient dû être décelés et résolus lors des vérifications annuelles de la corrélation. Cette situation pourrait s'expliquer en partie par le contenu désuet de l'Appendice C de la Norme 625 du RAC.
Les spécifications de l'EUROCAE sont reconnues à l'échelle internationale, et on y fait référence dans les normes et pratiques recommandées de l'Organisation de l'aviation civile internationale (OACI). En 2003, le document ED-55 a été remplacé par le document ED-112. Le document ED-112 a été publié pour mettre à jour les spécifications relatives aux enregistreurs de bord et fournit des directives améliorées sur la maintenance des FDR. Les directives pour la vérification de la corrélation des données ont également été améliorées et exigent que l'échantillon de données comprenne un vol complet, soit du démarrage à l'arrêt moteur. D'autres modifications au document ED-112 sont en cours dans le but de rendre compte de l'information technique la plus à jour.
1.11.2.3 Calcul de la trajectoire de l'aéronef
Le FDR n'a pas enregistré de données relatives à la position ou au temps. Le Laboratoire du BST a validé les données radar militaires et les a utilisées avec les marques d'impact répertoriées pour déterminer la trajectoire de vol par rapport à la piste à Resolute Bay (CYRB).
Les données radar ont été utilisées pour calculer la trajectoire de l'avion. Les paramètres d'altitude, de vitesse indiquée et de cap enregistrés ont ensuite permis d'établir une trajectoire de vol. Par la suite, la trajectoire de vol a fait l'objet d'une interpolation linéaire par rapport à la route, ce qui a donné une trajectoire de vol ajustée et précise.
Les données relatives à la position de l'avion ont été utilisées pour calculer la trajectoire au sol et la vitesse sol de l'aéronef. On a ensuite utilisé la vitesse et la direction prévues du vent pour calculer la dérive, le cap et la vitesse vraie de l'avion. Les résultats relatifs au cap et à la vitesse vraie de l'avion ont été comparés aux résultats du calcul de la trajectoire de vol, et la concordance entre les paramètres était bonne.
1.11.2.4 Données concernant le cap
Le FDR obtient les renseignements sur le cap du compas no 2. Les données enregistrées par le FDR du point de démarrage des moteurs jusqu'à 14 h 58 min 57,5 s étaient toutes invalides; par conséquent, il n'y a pas de renseignements sur le cap pour cette partie du vol. Les enquêteurs du BST ont examiné les données enregistrées valides relatives au cap qui provenaient du compas no 2 pour le reste du vol.
En raison des données de décollage anormales, il n'a pas été possible de déterminer si le décollage avait été effectué en degrés magnétiques et, le cas échéant, à quel point l'asservissement de cap a été annulé et à quel point le cap a été réglé aux degrés vrais. À 16 h 25 min 7 s, le paramètre de cap a été déplacé, indiquant que l'équipage de conduite avait effectué un changement de cap. Il y avait une différence d'environ 20È entre le cap enregistré par le FDR et le cap réel estimé de l'avion au moment de l'impact.
On peut aussi avoir recours à un triangle des vitesses pour calculer des variables inconnues si on connaît suffisamment d'autres variables (figure 3 et tableau 8).
Tableau 8. Résumé des calculs du triangle des vitesses (les zones en gris sont les résultats des calculs; KTAS fait référence à la vitesse vraie en nœuds; asl fait référence à l'altitude au-dessus du niveau de la mer)
16 h 25 min 7 s - compas no 2 asservi de nouveau
16 h 38 - avant le virage à MUSAT
16 h 40 min 35 s - en courte finale
Altitude
FL280
4300 pieds asl
1240 pieds asl
KTAS
406
207
179
Vent (°V/nœuds)
216/74
204/22
204/18
Trajectoire au sol selon les données radar (°V)
037
038
351
Vitesse sol résultante (nœuds)
480
228
194
Cap résultant (°V)
037
039
348
Cap enregistré du compas no 2 (°)
029
024
331
Différence de cap (°)
-8
-15
-17
Aux heures indiquées au tableau 8 pour les calculs de compas, les données du FDR indiquent que l'avion avait les ailes à l'horizontale.
Les données du FDR indiquent des périodes durant lesquelles les paramètres de cap enregistrés ont changé considérablement pendant que les ailes de l'avion étaient à l'horizontale. Les 2 exemples s'étalent du début des données valides à 14 h 58 min 57,5 s jusqu'à 15 h 48 min 25 s, et ensuite de 15 h 49 min 13 s à 16 h 12. Durant ces 2 périodes, le cap enregistré change lentement à un rythme de +25° par heure. Un autre exemple, où la dérive est dans le sens opposé à un rythme de −18° par heure, a lieu de 16 h 25 min 8 s à 16 h 35 min 10 s. Les enquêteurs du BST ont consulté Boeing, Honeywell, Western Avionics, First Air et l'école de navigation aérienne de l'Aviation royale canadienne (ARC) dans le but de déterminer pourquoi le compas s'est comporté de cette façon. Aucune réponse concluante n'a été obtenue.
11.11.2.5 Données sur les manœuvres du volant de commande
Le FDR a enregistré plusieurs manœuvres du volant de commande qui ne pouvaient pas être expliquées par le fonctionnement du pilote automatique : entre 16 h 38 min 49 s et 16 h 38 min 57 s, puis à 16 h 39 min 18 s et à 16 h 39 min 36 s.
1.11.3 Enregistreur de conversations de poste de pilotage
L'avion était équipé d'un CVR à semi-conducteurs Honeywell d'une capacité d'enregistrement minimale de 30 minutes. La mémoire a pu être téléchargée avec succès et elle contenait des données audio de bonne qualité pour les 31 dernières minutes du vol.
1.11.4 Synchronisation de l'enregistreur de données de vol et de l'enregistreur de conversations de poste de pilotage
La référence temporelle du CVR a été convertie en temps universel coordonné (UTC) en synchronisant l'audio avec les enregistrements du contrôle de la circulation aérienne (ATC) fournis par NAV CANADA. Le FDR a ensuite été synchronisé avec le CVR en comparant les manipulations du bouton d'émission VHF enregistrées par le FDR. L'échantillonnage des manipulations du bouton d'émission VHF a été effectué une fois par seconde; par conséquent, la plage d'erreur possible de synchronisation CVR-FDR pourrait être de ±1 seconde.
1.12 Renseignements sur l'épave et sur l'impact
1.12.1 Impact
L'avion a percuté l'épaulement d'une colline environ 1 mille marin (nm) à l'est du milieu de la piste de Resolute Bay (CYRB). Il a heurté un relief ascendant à 396 pieds au-dessus du niveau de la mer (asl) en cabré de 5°, les ailes à l'horizontale, avant de rebondir dans les airs, perdant des composants le long du tracé de dispersion des débris. L'avion a poursuivi sa course suivant une courbe balistique au-dessus de la crête de l'épaulement et a heurté le sol en pente légèrement descendante le long du plateau formé par le dessus de l'épaulement (figure 4).
Le deuxième point d'impact a eu lieu à environ 590 pieds du point d'impact initial. En glissant au sol, l'avion s'est disloqué en 3 sections importantes (l'empennage, la partie centrale du fuselage avec les ailes et la partie avant du fuselage avec le poste de pilotage). L'empennage et la partie centrale du fuselage sont restés sur le plateau; la partie avant du fuselage avec le poste de pilotage a continué plus loin le long de la zone de débris et s'est immobilisée dans une ravine formée par un ruisseau qui se déverse dans le lac Strip (photo 4).
Photo 4. Lieu de l'accident, regardant en direction nord
Le tracé des débris s'étendait en direction nord-nord-ouest, sur un cap d'environ 344 °V. Le tracé des débris mesurait 1400 pieds en tout, du point d'impact initial jusqu'au poste de pilotage. La section la plus large du tracé des débris mesurait environ 320 pieds. Une roue s'est immobilisée au pied de la colline à l'est du lac Strip.
1.12.2 Épave
Tous les dommages à la structure de l'avion trouvés dans le tracé des débris étaient attribuables à l'impact avec le sol. Tous les principaux composants structuraux de l'avion ont été retrouvés dans le tracé des débris. Aucun indice pouvant suggérer la présence d'une défaillance de structure non liée à l'impact avec le sol n'a été décelé.
Compte tenu de l'importance de la désintégration de l'avion et des dommages attribuables à l'incendie après l'impact, il a été impossible d'effectuer un examen complet de toutes les surfaces de rupture. Cependant, les surfaces de rupture qui ont été examinées présentaient des caractéristiques compatibles avec une défaillance causée par une surcharge. On n'a trouvé aucun indice de défaillance préexistante causée par la fatigue.
La partie centrale du fuselage et l'aile droite avaient été exposées à un violent incendie après l'impact. Aucun élément de l'épave trouvé dans le tracé des débris avant ce point ne présentait de signe de dommages causés par un incendie. Il n'y avait aucun signe pouvant indiquer qu'il y a eu un incendie à bord de l'avion avant l'impact.
Les dommages aux moteurs no 1 et no 2 étaient caractéristiques d'une rotation élevée à l'impact. La similitude des dommages entre les 2 moteurs suggère que le régime des 2 moteurs était comparable. Les 2 moteurs fonctionnaient normalement et répondaient aux commandes avant l'impact.
Le sélecteur VHF NAV a été récupéré en position CAPT ON AUX. Un examen au microscope a révélé que le sélecteur était vraisemblablement en position NORMAL avant l'impact, mais qu'il avait été forcé en position CAPT ON AUX par l'impact.
Les 3 récepteurs VHF/NAV ont été récupérés, et ils étaient endommagés. Le 12 décembre 2011, les récepteurs ont été examinés aux installations de Rockwell Collins à Irving (Texas) sous la supervision du BST. L'examen a révélé que les récepteurs no 1 et no 2 étaient vraisemblablement réglés à une fréquence du système d'atterrissage aux instruments (ILS). L'examen n'a pas permis de déterminer à quelle fréquence le récepteur no 3 était réglé. Parce que le sélecteur VHF NAV était vraisemblablement en position NORMAL, le récepteur no 3 n'aurait pas été utilisé activement au moment de l'accident.
Le démontage et un examen au microscope du panneau de commande NAV/Com du commandant de bord ont révélé que le sélecteur NAV était réglé à 110,30 (fréquence ILS pour CYRB) au moment de l'impact. Le cadran de réglage de l'équipement de mesure de distance (DME) était réglé à DME. Le sélecteur NAV du panneau de commande NAV/Com du P/O était réglé à 110,30 lorsqu'on l'a trouvé. Le cadran de réglage du DME était réglé à DME.
Il n'a pas été possible de tirer de renseignements de l'examen des composants du radiogoniomètre automatique (ADF).
Le sélecteur de transfert compas, de type verrouillable à bascule, a été récupéré en position BOTH ON 1. Un examen au microscope a révélé qu'il était vraisemblablement en position NORMAL avant l'impact et qu'il avait été forcé par l'impact à la position BOTH ON 1.
Il n'a pas été possible d'établir l'état ou les réglages des commandes compas avant l'impact en raison des dommages subis. La position après l'impact des boutons de commande de latitude des commandes compas no 1 et no 2 était 68° et 66°, respectivement.
L'examen en laboratoire des ampoules du comparateur d'instruments n'a pas permis de conclure si elles étaient allumées ou non au moment de l'impact. L'enregistreur de conversations de poste de pilotage (CVR) ne contenait aucune information relative à l'illumination du voyant annonciateur du comparateur de cap à quelque moment que ce soit durant le vol.
L'examen en laboratoire a permis de conclure que l'aiguille de relèvement large de l'ADF/VOR no 2 de l'indicateur radiomagnétique (RMI) du commandant de bord indiquait entre 315° et 320° au moment de l'impact. On n'a pas pu tirer d'autres conclusions concernant la situation avant l'impact. L'examen du RMI du P/O n'a pas permis de tirer de conclusions sur son état avant l'impact.
Le verre du cadran de l'indicateur de situation horizontale (HSI) du commandant était brisé, et les composants internes étaient endommagés. Tel que l'indicateur a été reçu, le cap indiqué sous la ligne de foi était de 330°, l'affichage numérique de route était réglé à 298°, l'indicateur du DME affichait 000 et le curseur de cap était réglé à 330°. Une analyse du motif de la boue sur les affichages suggère que l'affichage numérique de route était réglé à 328° et que l'indicateur du DME affichait 010 lorsque le verre du cadran s'est brisé. L'instrument ne présentait aucune autre marque concluante.
Le verre du cadran du HSI du P/O était brisé, laissant le cadran exposé. Tel que l'indicateur a été reçu, le cap indiqué sous la ligne de foi était de 320°, l'affichage numérique de route était réglé à 340°, l'indicateur du DME affichait 600 et il n'y avait pas de curseur de cap. Une marque de frottement de peinture sur la rose compas, correspondant au point de contact de l'aiguille avec celle-ci, plaçait la barre d'écart de route à une indication de 1 point à la gauche du centre. L'examen du motif de la boue sur l'affichage numérique de route suggère qu'il était réglé à 343° lorsque le verre du cadran s'est brisé. L'instrument ne présentait aucune autre marque concluante.
L'examen en laboratoire des 2 HSI n'a pas permis de tirer de conclusions sur leur état avant l'impact.
Même si divers composants du pilote automatique ont été récupérés, il n'a pas été possible de déterminer de manière concluante les réglages au moment de l'accident. Ces composants ne présentaient aucune marque caractéristique et ne contenaient aucune mémoire rémanente téléchargeable.
Un examen technique des voyants annonciateurs de l'avion n'a pas donné de résultats concluants. Aucun des voyants ne présentait d'étirement ou de déroulage normalement caractéristique de filaments chauds au moment de l'impact, même dans le cas des voyants qu'on croyait être allumés. Par conséquent, il se peut que certains voyants fussent allumés au début de l'impact, mais l'analyse semble indiquer qu'ils étaient éteints.
Un examen technique de la mémoire rémanente des 2 GPS a révélé ce qui suit :
les 2 contenaient la base de données en vigueur, dont la date d'expiration était le 25 août 2011;
les données des 2 unités étaient identiques;
les 2 unités indiquaient que l'avion avait dévié vers la droite de la trajectoire voulue;
il n'a pas été possible de déterminer l'échelle à laquelle les panneaux de commande et d'affichage (CDU) étaient réglés au moment de l'événement, car cette information est réinitialisée lorsque l'alimentation de l'unité est coupée;
il a été constaté que la dernière position était 74°42.96′ N, 094°55.04′ W;
OTNEL était le point de cheminement sélectionné;
il a été constaté que le plan de vol actif était VIA RNAV35 :
directement vers MUSAT à 1200 pieds,
OTNEL (repère d'approche finale) à 1000 pieds (cette indication était de couleur mauve, indiquant qu'il s'agissait du point cible),
RW35 (point d'approche interrompue) (cette indication était de couleur verte, indiquant qu'il s'agissait du point suivant sur la liste),
CYRB.
1.13 Renseignements médicaux et pathologiques
Rien n'indique que des facteurs physiologiques ont eu une incidence négative sur le rendement du commandant de bord ou du P/O.
1.14 Incendie
À 17 h 06, on a demandé au poste d'incendie de veiller à ce que les camions d'incendie soient prêts à intervenir à l'aérodrome. À 17 h 19, pendant que les nuages masquant la colline se dégageaient quelque peu, le personnel à proximité de la tour de contrôle a déclaré avoir vu de la fumée et des flammes sur un relief plus élevé à l'est de la piste. Le contrôleur sol a immédiatement déclaré une urgence et a envoyé les véhicules d'incendie sur les lieux. Les véhicules de lutte contre les incendies se sont rendus de l'aérodrome au lieu de l'accident en empruntant le chemin d'accès à l'antenne VOR. Ils ont avancé lentement en raison de la visibilité réduite sur la colline. Le chef du service d'incendie, indicatif d'appel Red Leader, a tenu la tour au courant de l'état d'avancement et, juste au-delà du VOR, a indiqué que c'était trop dangereux pour continuer. Red Leader est descendu du véhicule pour mieux évaluer les conditions. Au même moment, Red Leader a demandé qu'on envoie autant de véhicules tout-terrain (VTT) que possible afin de pouvoir accéder plus facilement au lieu de l'accident et transporter du matériel pour les pompiers.
À 17 h 31, Red Leader a dit que l'avion était en vue, mais toujours obscurci, et que l'appareil se trouvait à une bonne distance. Il a signalé un petit incendie, qui selon lui pouvait être maîtrisé par les pompiers, et a demandé qu'on ramasse des extincteurs et des appareils respiratoires autonomes lorsque les VTT arriveraient aux véhicules d'incendie; ces véhicules ne pouvaient plus avancer en raison d'un ravin. À ce moment, les autres pompiers sont descendus des véhicules, et chacun d'eux s'est équipé de 2 extincteurs des véhicules, avant de se rendre à la course jusqu'au lieu de l'accident, qu'on disait être à une distance d'environ 800 m.
Les pompiers ont rapidement éteint l'incendie dans le fuselage de l'avion et ont ensuite prêté main-forte aux premiers intervenants pour assurer la sécurité des lieux et prendre soin des survivants.
1.15 Questions relatives à la survie des occupants
1.15.1 Opérations de sauvetage
À 17 h 37, Red Leader a été avisé qu'il y avait 15 personnes à bord de l'avion. À 17 h 41, Red Leader a signalé que 3 survivants avaient été repérés, et qu'on organisait la recherche des autres, en conformité avec les procédures de sauvetage. Il a été déterminé que les autres membres de l'équipage et les passagers étaient décédés sur le coup.
Lorsque les nuages se sont dégagés, un hélicoptère Griffon de l'ARC a été dépêché sur les lieux à partir de l'aérodrome. Vers 17 h 39, un technicien en recherche et sauvetage à bord a pu diriger l'hélicoptère au lieu d'atterrissage le plus approprié pour ne pas nuire à la lutte contre l'incendie. On a apporté des civières sur les lieux, et vers 17 h 55, on a évacué les 3 survivants par hélicoptère pour les transporter directement à l'hôpital militaire. Un avion de transport militaire CC-177 est parti de Resolute Bay (CYRB) à 22 h 11 avec les survivants et est arrivé à Iqaluit (Nunavut) à 0 h 31. Par la suite, les 3 survivants ont finalement été transportés à des hôpitaux à Ottawa (Ontario).
1.15.2 Radiobalise de repérage d'urgence
Il n'y avait aucun dossier indiquant qu'un organisme avait détecté un signal de la radiobalise de repérage d'urgence (ELT) de l'avion. L'enquête a révélé que l'ELT avait été installée avec l'interrupteur en position OFF, et qu'elle ne pouvait pas, par conséquent, émettre automatiquement au moment de l'impact. Le câble reliant l'ELT à son antenne a été sectionné au moment de l'impact, ce qui aurait considérablement réduit le signal émis si l'ELT avait été armée. L'enquête a aussi établi que le module d'interface de l'avion (clé électronique) contenait le code d'identification de l'avion sur lequel le module avait été installé précédemment. Le fait qu'un identificateur erroné était programmé dans l'ELT ne l'aurait pas empêchée de fonctionner comme prévu, mais cela aurait indiqué à l'équipe de recherche et sauvetage qu'un autre avion émettait un signal d'urgence.
1.15.3 Dommages aux sièges des occupants et à la structure de l'aéronef
Pour le vol en cause, l'avion était configuré avec 5 postes de fret et 4 rangées de sièges de passagers. Les agents de bord étaient assis derrière la quatrième rangée de passagers, du côté gauche de l'avion. Les sections occupées de l'avion ont été lourdement endommagées pendant l'accident.
Le ventre de la partie centrale du fuselage était partiellement arraché, ce qui est caractéristique d'une épave traînant au sol avant de s'immobiliser. Le plancher de la cabine des passagers s'est complètement séparé du fuselage et était considérablement disloqué. Une section de plancher contenant les 4 rangées de sièges de passagers de gauche s'est immobilisée à 372 m (1222 pieds) du point d'impact initial, entre la partie arrière et la partie centrale du fuselage. Le plancher et les sièges de passagers du côté droit étaient considérablement disloqués et éparpillés sur la zone de débris. Les sièges des agents de bord avaient été arrachés de la structure de l'avion. La partie avant du fuselage et le poste de pilotage ont subi une importante dislocation structurelle. Les fenêtres du poste de pilotage et la structure qui les entoure, le puits des roues du train avant, la cloison étanche avant et le radôme avant ont été séparés du fuselage. Les sièges des pilotes ont été arrachés du plancher.
Le système de retenue utilisé pour empêcher les occupants, le fret et les composants de se frapper à l'intérieur de l'avion est généralement appelé l'enchaînement des dispositifs d'arrimage. Cet enchaînement est constitué de la ceinture de sécurité et de son ancrage, des bretelles de sécurité et de leur ancrage, de la structure des sièges et de leur ancrage ainsi que du plancher. La défaillance de tout composant de l'enchaînement des dispositifs d'arrimage augmente considérablement le risque de blessure. Dans le cas présent, on a noté des défaillances dans tous les systèmes de retenue des occupants.
Le châssis ou le dossier, le baquet et les accoudoirs de tous les sièges étaient brisés ou déformés. Vraisemblablement, ces dommages ont été en partie causés par les sièges éjectés heurtant le sol à grande vitesse. Ces observations indiquent que les forces auxquelles la structure et les dispositifs de fixation des sièges ont été soumis pendant la séquence de désintégration étaient supérieures à leur résistance de calcul.
On a constaté que les dommages aux sièges étaient plus importants là où la structure de l'avion était le plus lourdement endommagée, comme c'était le cas des sièges extérieurs du côté droit et de la rangée des agents de bord, ce qui correspond à la séparation entre les parties centrale et arrière du fuselage. Selon toute vraisemblance, ces sièges se sont séparés plus tôt pendant la séquence de désintégration. Par conséquent, ils auraient été entraînés par une plus grande force d'impulsion, ce qui les a déplacés sur une plus grande distance que les sièges du côté gauche; ceci explique l'ampleur des dommages observés.
Au moment de l'écrasement, on avait effectué l'exposé aux passagers avant l'atterrissage et on avait sécurisé la cabine en vue de l'atterrissage. Rien n'indique que les agents de bord étaient au courant de la nécessité de préparer la cabine pour une urgence avant l'écrasement. Ni l'un ni l'autre des agents de bord n'a survécu à l'écrasement. Ils n'ont par conséquent pas participé aux efforts d'évacuation, de lutte contre l'incendie ou d'administration des premiers soins après l'impact. Les survivants étaient grièvement blessés, mais ils étaient suffisamment mobiles pour s'aider entre eux pour atteindre le bord de la zone de débris afin de s'éloigner du feu et de la fumée. C'est à cet endroit qu'ils ont attendu les secours.
L'examen après l'écrasement a permis d'établir que certaines des ceintures abdominales des passagers n'étaient peut-être pas serrées solidement autour des hanches des occupants. Les renseignements médicaux indiquent que les ceintures abdominales lâches n'ont pas contribué aux importantes blessures subies par les occupants. Rien ne permet de lier une ceinture abdominale lâche et l'éjection de l'occupant de son siège. Par conséquent, rien n'indique que le réglage et le positionnement des ceintures abdominales aient eu une incidence sur la capacité de survie des adultes ou des enfants à cet accident.
1.16 Essais et recherches
Le BST a tenu une série de séances dans un simulateur de B737-200 à Vancouver (Colombie-Britannique) les 19 et 20 mars 2012. Les principaux objectifs de ces séances en simulateur étaient de :
familiariser les enquêteurs avec :
l'aménagement, l'ergonomie et les procédures d'exploitation du poste de pilotage du B737,
le fonctionnement du pilote automatique, du directeur de vol et des systèmes de navigation VHF,
l'interaction de l'équipage avec ces composants;
évaluer les scénarios d'approche élaborés par les enquêteurs.
On a tenu 4 séances différentes en simulateur au cours des 2 jours, pour un total de 36 essais sur simulateur. Parmi les personnes présentes, il y avait des membres du personnel du BST (directeur des essais, enquêteur en performance humaine et spécialiste multimédia), du National Transportation Safety Board (NTSB) des États-Unis (enquêteurs en exploitation et en performance humaine), de First Air (cadres et pilotes instructeurs) et de Boeing (enquêteurs en systèmes et en ingénierie). Le fonctionnement du simulateur était assuré par un représentant de First Air, tandis que des représentants de First Air et de Boeing pilotaient le simulateur.
Le simulateur était équipé des mêmes systèmes de pilote automatique et de directeur de vol que ceux installés dans l'avion C-GNWN. Puisque le simulateur n'était pas équipé d'un GPS, ce composant n'a pas pu faire l'objet d'une simulation.
Les séances en simulateur ont atteint les objectifs susmentionnés. Les essais ont révélé ce qui suit :
Le pilote pouvait forcer le pilote automatique à passer du mode VOR/LOC à MAN en exerçant une force manuelle sur le volant de commande supérieure à la force de surpassement pertinente, sans causer de roulis.
Dans tous les cas, l'utilisation du mode VOR/LOC du pilote automatique a entraîné l'interception et le suivi de l'alignement de piste ou la convergence avec celui-ci.
1.17 Renseignements sur les organismes et sur la gestion
1.17.1 First Air
First Air est le nom commercial utilisé par Bradley Air Services Limited. Le siège social de First Air est situé à Kanata (Ontario), et sa base principale d'exploitation est à Ottawa (Ontario). La société exploite des bases secondaires à Baker Lake, Cambridge Bay, Hall Beach, Iqaluit, Kugluktuk et Resolute Bay (Nunavut), de même qu'à Yellowknife (Territoires du Nord-Ouest). Elle emploie environ 1000 personnes.
L'organisation fournit des services réguliers et non réguliers de transport aérien de passagers et de tous les types de fret (y compris des matières dangereuses), au pays et à l'étranger. L'entreprise exploite des avions Boeing 737, Boeing 767, ATR 42, ATR 72 et Lockheed L382 Hercules sous le régime de la sous-partie 705 du Règlement de l'aviation canadien (RAC). Au moment de l'accident, l'entreprise exploitait 6 avions B737 et comptait 45 pilotes.
1.17.1.1 Manuel d'exploitation de First Air
Les politiques de First Air régissant toutes ses opérations aériennes sont comprises dans le manuel d'exploitation de First Air (FOM).
L'article 1.8.1 du FOM présente la politique de l'entreprise en matière de disponibilité et d'utilisation des procédures d'utilisation normalisées (SOP). Les renseignements propres à un type d'avion, y compris les SOP, sont contenus dans le manuel de vol (AOM) pertinent, soit le First Air B737 Operations Manual, remis à chaque membre de l'équipage de conduite. L'AOM et les modifications sont approuvés par Transports Canada (TC), et ils remplacent le manuel d'utilisation aéronef. Les pilotes sont tenus d'avoir une connaissance pratique de ces documents.
L'AOM compte 3 volumes. Le volume 1 aborde l'information sur les phases et les conditions de vol. Il se compose de bulletins, de limites, de procédures d'urgence et anormales, de procédures normales et de procédures supplémentaires. La modification 23 du volume 1, datée du 21 juin 2011, était en vigueur au moment de l'accident.
Le volume 2 contient une explication des systèmes distincts et vise à communiquer les caractéristiques fonctionnelles qui s'inscrivent dans les paramètres d'exploitation des équipages de conduite. La modification 3 du volume 2 était en vigueur au moment de l'accident. Le volume 3 et le supplément 1 du volume 3 contiennent des données de performance. La modification 9 du volume 3 était en vigueur au moment de l'accident.
L'article 1.8.1 du FOM se termine comme suit [en anglais seulement]Footnote 39 :
No deviation from AOM standard operating procedures is acceptable unless the PIC determines that the safety of the flight may be compromised. In this event, the deviation must be thoroughly understood by all flight crew members.
1.17.1.2 Manuel de vol : procédures normales
First Air préconise une philosophie de vérifications par balayage voulant qu'en exploitation normale, les pilotes prennent certaines mesures (vérifications par balayage) de mémoire, et la plupart des points d'une vérification par balayage sont confirmés en suivant la liste de vérifications connexe. Le concept question-réponse est utilisé pour toutes les listes de vérifications normales. Les réponses doivent être audibles et claires, et toute réponse autre que celle requise par la liste de vérifications est jugée incorrecte. Chaque point de la liste de vérifications doit être répété jusqu'à l'obtention de la bonne réponse. En général, le P/O fait la lecture des listes de vérifications lorsque l'avion est au sol, et le pilote qui n'est pas aux commandes fait de même lorsque l'avion est en vol.
Where the checklist requires a multiple response, the order of response on the ground will be captain then FO, and in flight, PF then PNF. When a checklist is complete, the FO (or PNF in flight) will confirm completion by stating that it is completed, e.g., ”Before-Start Checklist Complete“. A note on this page specifies that final landing gear and flap position shall always be confirmed by the captain.
L'AOM décrit les attentes de l'entreprise comme suit [en anglais seulement]Footnote 41 :
It is the responsibility of all crew members to call to the Captain's attention, any situation that is not normal. It is not assumed that the Captain is aware of the problem. POINT IT OUT! This applies to all flight procedures, ground procedures and any time the aircraft is crewed… The Captain is solely responsible for strict adherence to checklist philosophy.
La liste de vérifications dynamique est fixée aux volants de commande gauche et droit, et on y trouve les points de la liste de vérifications normale relatifs aux phases avant décollage et en vol à utiliser lorsque l'avion est en mouvement (figure 5).
Figure 5. Liste de vérifications dynamique du B737 de First Air [en anglais seulement] (source: First Air B737 Operations Manual, volume 1, modification no. 23, 21 June 2011, page 03.10.1)
À la page 03.20.3 de l'AOMFootnote 42, on décrit le format de la liste de vérifications, précisant qu'une ligne pointillée est placée dans la liste de vérifications pour indiquer une pause dans la séquence, et la nécessité de prendre certaines mesures avant de pouvoir poursuivre la liste (p. ex., réglage de radios NAV pour l'approche, etc.). Lorsque la liste de vérifications est lue et que le point suivant est la ligne pointillée, le demandeur dit « Down to the line » [traduction : jusqu'à la ligne]. La liste de vérifications en approche a une ligne pointillée.
Même si l'exécution de la liste de vérifications avant l'atterrissage se fait en 2 phases, aucune ligne pointillée ne sépare les 2 phases dans la liste de vérifications avant l'atterrissage développée ou dynamique, contrairement à la liste de vérifications en approche.
Antérieurement, au moins 5 ans avant l'accident, l'exécution de la liste de vérifications avant l'atterrissage se faisait lorsque le train était sorti en vue de l'atterrissage. En réponse à un événement d'approche instable, l'entreprise a révisé ses procédures de façon à ce que la liste de vérifications avant l'atterrissage soit exécutée plus tôt durant l'approche, et ce, en 2 phases. Les listes de vérifications développées et dynamiques n'ont pas été révisées. On n'a pas pensé insérer une ligne pour indiquer une pause dans la liste de vérifications.
Les procédures liées aux listes de vérifications sont décrites aux pages 03.20.4 à 03.20.6 de l'AOM. Le point 4 traite de l'interruption de la liste de vérifications, et précise ce qui suit [en anglais seulement]Footnote 43 :
When the Captain elects not to accomplish an item on the checklist when it is called, s/he will state “Hold the checklist at (the item ). [sic]
Note: The checklist will not proceed beyond an item until the item is accomplished and the proper response is given.
Le point 5 porte sur la poursuite de la liste de vérifications, et précise ce qui suit [en anglais seulement]Footnote 44 :
When the Captain desires to continue the checklist, s/he will state “Continue the checklist”. The checklist will then resume with the item at which it was held.
Les procédures de l'entreprise liées à l'utilisation du pilote automatique en mode MAN font l'objet de l'annexe Q. Les procédures liées à l'exploitation du pilote automatique en mode VOR/LOC et du directeur de vol en mode AUTO APP figurent aux annexes R et S. La seule procédure anormale ou d'urgence liée au pilote automatique est la procédure de débrayage du pilote automatique. Dans le cadre de cette procédure, l'équipage doit piloter l'avion manuellement. Il n'y a pas de procédure anormale ou d'urgence liée au directeur de vol.
1.17.1.3 Incapacité d'un membre d'équipage et règle des deux appels
L'article 10.24.1 du FOM traite de l'incapacité du pilote comme suit [en anglais seulement]Footnote 45 :
Incapacitation of an individual can be either obvious (gross) or subtle (partial). Obvious incapacitation can be caused by anything from heart failure to a speck of dust in the eye. Subtle incapacitation can be caused by anything from a brain tumor to a mental lapse caused by stressFootnote 46.
Recognition of obvious incapacitation, by definition, presents no problem. Subtle or partial incapacitation is particularly insidious in that the non-functioning pilot can enter this state and may appear perfectly normal with eyes open and hands on the controls. Recognition of subtle incapacitation may take considerable time and presents a unique problem for the First Officer; that is, how far should he allow the aircraft to deviate before taking over control from the PIC. For these reasons, the “two communication rule” shall be adopted to reduce the risk of accident, especially in the critical phases of flight, the takeoff and initial climb and the approach and landing.
L'article 10.24.2 du FOM traite de la règle des deux appels de l'entreprise comme suit [en anglais seulement]Footnote 47 :
Whenever the other pilot does not respond to two consecutive verbal communication attempts with either a reply or by executing a corrective flight manoeuvre you will say “I have control” (if you are not already the pilot flying) and will take over control of the aircraft until it can be ascertained that the lack of response was not caused by incapacitation.
Whenever incapacitation occurs, whether obvious or subtle, the procedure is as follows:
Assume control and fly the aircraft to a safe situation, or engage autopilot (if available);
Restrain and/or remove the incapacitated pilot, with the assistance of a Flight Attendant (if available);
Reorganize the cockpit and prepare for landing;
Arrange for an ambulance to meet the aircraft.
Tout au long de la partie enregistrée du vol, le commandant de bord de FAB6560 répondait verbalement aux commentaires et aux suggestions du P/O et agissait sur les commandes.
Au moment de l'accident, autre que la règle des deux appels, l'entreprise n'avait pas de politique, de procédure ou de formation donnant des directives sur la façon dont un P/O pouvait passer d'un rôle consultatif à la prise des commandes de l'avion, hors des mains du commandant de bord. Des entrevues avec des pilotes ont révélé que la plupart des commandants étaient surpris et mal à l'aise lorsqu'on leur demandait comment un P/O peut prendre les commandes d'un commandant qui n'est pas clairement frappé d'incapacité.
1.17.1.4 Fonctionnement des compas dans l'espace aérien intérieur du Nord
Les politiques et les procédures de l'entreprise relatives à l'utilisation des compas dans l'espace aérien intérieur du Nord (NDA) font l'objet de l'annexe T. On y trouve la procédure permettant d'obtenir un cap vrai à l'aide du GPS et du radiophare non directionnel (NDB). Le résultat de cette procédure est le cap vrai, qui est affiché sous la ligne de foi de l'indicateur radiomagnétique (RMI).
Même si ce n'est pas mentionné expressément dans l'AOM, l'entreprise privilégie l'utilisation du NDB de destination pour obtenir un cap sur le GPS puisque cela réduit au minimum l'effet du taux de précession de transport terrestre. La plupart des destinations dans la zone d'opérations de l'entreprise sont desservies par un NDB qui serait le seul NDB utilisable pour un vol à l'arrivée. C'était le cas de Resolute Bay (CYRB) et du radiophare non directionnel de Resolute Bay (RB NDB).
1.17.1.5 Pratiques des pilotes de B737 de First Air relatives au fonctionnement des compas
Des entrevues avec des pilotes ont révélé que leurs pratiques variaient quelque peu, de l'application intégrale de l'AOM à des normes qui dérogeaient considérablement à l'AOM. Par exemple, au départ de CYZF en direction nord, les équipages ont déclaré bien se conformer à l'exigence de commencer l'exploitation en mode conservateur de cap (DG) autonome en entrant dans le NDA. Cependant, dans le cas de vols est-ouest exploités à destination et au départ de Rankin Inlet (Nunavut) (CYRT), de nombreux pilotes ont déclaré rester en mode MAG plutôt que de passer au mode DG comme il se doit, parce que la déclinaison magnétique à CYRT n'était que de 4°.
Sans exception, les pilotes réglaient le cap vrai au moyen de la procédure GPS/NDB plutôt que de l'astrocompas, en conformité avec la procédure indiquée à l'annexe T. Cependant, le moment et la fréquence de l'exécution de cette procédure variaient considérablement. Un pilote a déclaré suivre cette procédure régulièrement tout au long du vol, plus particulièrement pendant la descente à destination, tandis que d'autres ont déclaré qu'ils ne l'exécutaient que lorsque la liste de vérifications le demandait.
On n'a trouvé aucun renseignement concernant les pratiques de l'équipage du vol FAB6560; cependant, les données de l'enregistreur de données de vol (FDR) et de l'enregistreur de conversations de poste de pilotage (CVR) indiquent que les compas n'ont été réglés qu'une seule fois, à 16 h 25 min 7 s, durant la partie du vol pour laquelle il y avait des données valides. À ce moment, le RB NDB était le seul NDB à sa portée, dans une direction de 029 °V et à une distance de 91 nm de l'avion.
Les pilotes ont déclaré que les compas des B737 de l'entreprise donnaient parfois des valeurs si différentes que le comparateur de cap s'allumait. Ce problème se réglait lorsque les compas étaient asservis en mode MAG ou qu'on les réinitialisait en mode DG.
Les pilotes ont déclaré avoir recours à différentes pratiques pour régler le contrôleur de latitude. Certains d'entre eux réglaient le contrôleur à la latitude moyenne approximative de la route à suivre, tandis que d'autres utilisaient la latitude actuelle au moment du réglage du compas. On n'a trouvé aucun renseignement concernant les pratiques de l'équipage du vol FAB6560.
1.17.2 Adaptation des procédures d'utilisation normalisées
1.17.2.1 Généralités
Les SOP et les listes de vérifications constituent une source d'information essentielle qui fournit aux pilotes des lignes directrices sous forme de procédures pour l'exploitation d'un avion. Elles aident les pilotes à prendre des décisions et à établir des modèles mentaux partagés entre eux. En outre, elles offrent aux pilotes des solutions concluantes préétablies aux diverses situations et tiennent compte de facteurs de risque qui peuvent échapper au pilote durant l'exploitation normale ou en cas de situation anormale ou d'urgence.
Bien qu'il soit impossible d'élaborer des listes de vérifications ou des procédures pour parer à toute éventualité, le fait de suivre la liste de vérifications ou la procédure appropriée procure aux pilotes la mesure la plus sécuritaire et la plus efficace dans la plupart des cas. Cependant, si une certaine discipline à l'égard des listes de vérifications et des procédures n'est pas enseignée, mise en pratique, renforcée et surveillée, il y a un risque que des pilotes s'écartent des procédures prescrites ou réagissent de façon inappropriée à des situations inhabituelles.
Les règles et les instructions sont rarement respectées à la lettre; les gens adaptent ces exigences pour des raisons et selon des manières qui leur semblent logiques, selon leurs connaissances, leurs buts et les circonstancesFootnote 48.
Les entreprises prescrivent des politiques et des SOP dans le but de fixer des limites sécuritaires pour les opérations; cependant, certaines personnes peuvent jouer avec ces limites afin d'être plus productives ou d'obtenir d'autres avantages. Il en résulte des versions adaptées des procédures et un écart par rapport aux limites fixées par les SOP qui mènent à des pratiques non sécuritairesFootnote 49. Si rien n'est fait pour y remédier, les membres d'équipage se communiquent entre eux les versions adaptées qui fonctionnent bien, puis ces versions se répandent dans toute l'entreprise.
Il est peu probable que les personnes qui utilisent de telles adaptations y voient un écart par rapport aux procédures. Les adaptations se transforment lentement en comportement normal, et il devient peu probable qu'on reconnaisse le risque connexeFootnote 50. Cette tendance a été décrite comme la normalisation de la dévianceFootnote 51.
Sans supervision, éducation ou application des limites attendues sur une base régulière, certaines personnes auront tendance à continuer à adapter les procédures et à prendre des raccourcis jusqu'à ce qu'elles découvrent la véritable limite d'une situation non sécuritaire au cours d'un accident, petit ou grave.
La présente enquête a permis de relever de nombreuses situations où l'équipage de conduite du vol FAB6560 s'est écarté des SOP. Les enquêteurs ont réalisé des entrevues structurées auprès de 9 pilotes de B737 de First Air basés à CYZF afin de déterminer si les écarts par rapport aux SOP étaient employés au sein d'autres équipages de conduite.
Les prochaines rubriques décrivent les principaux écarts employés par l'équipage du vol FAB6560 par rapport à la philosophie d'exploitation, aux politiques ou aux procédures des listes de vérifications de l'entreprise. Certaines rubriques comprennent une discussion des pratiques des équipages de B737. D'autres exemples de pratiques des équipages font l'objet de l'annexe V. Les listes de vérifications développées propres aux différentes phases de vol se trouvent à l'annexe U.
1.17.2.2 Croisière
1.17.2.2.1 Exposé d'approche
En général, le pilote aux commandes (PF) fait l'exposé d'approche avant la descente dans le cadre des vérifications avant descente. Les tâches de surveillance du pilote qui n'est pas aux commandes (PNF), les annonces normalisées et les tolérances, de même que les annonces de hauteur de décision normalisées, doivent être confirmées par le PF avant la première approche du PF de la journée. Les exposés d'approche du PF subséquents peuvent être abrégés de manière à inclure les points mentionnés ci-dessous, suivis d'une déclaration précisant que les annonces normalisées de l'entreprise s'appliquent et d'une requête visant à savoir s'il y a des questions. L'exposé d'approche doit comprendre les renseignements suivants :
le nom et la date d'entrée en vigueur de la carte d'approche;
la configuration des NAVAID voulue pour l'approche et l'approche interrompue;
les altitudes minimales (corrigées en fonction de la température) à chaque point de l'approche;
la hauteur de décision;
d'autres points au besoin, plus particulièrement lorsqu'on arrive à destination d'un aéroport inconnu (p. ex., décalage de piste, seuil de piste décalé, balisage lumineux d'approche inhabituel ou autre renseignement pertinent qui pourrait avoir une incidence sur l'approche ou l'atterrissage).
Des entrevues ont révélé que les pilotes avaient l'habitude de faire l'exposé d'approche avant le début de la descente, comme dans le cas du vol FAB6560. Cette pratique était conforme à l'AOM. Cependant, les exposés étaient couramment abrégés lorsqu'on connaissait bien les membres de l'équipage, lorsque les conditions météorologiques étaient bonnes et lorsque la même approche était empruntée pour une deuxième ou une troisième fois au cours d'une même journée.
Le commandant de bord du vol FAB6560 a fait l'exposé d'approche à 16 h 17 min 11 s. Les vitesses mentionnées dans l'exposé étaient de 132 (VREF)Footnote 52, de 137 (VREF + 5) et de 147 (VREF + 15). Se reporter à l'annexe V pour obtenir une description de ces vitesses. L'exposé était incomplet, puisqu'il ne contenait pas le nom ou la date de la carte d'approche, la configuration des NAVAID voulue ou les altitudes minimales autres que la hauteur de décision. Les autres renseignements s'appliquant à l'approche et à l'atterrissage prévus étaient l'état du ciel, la visibilité et le vent arrière; cependant, aucun de ces éléments n'était inclus dans l'exposé d'approche. Il se peut que les pilotes aient discuté de certains ou de la totalité de ces éléments plus tôt au cours du vol avant le début de l'enregistrement du CVR.
1.17.2.2.2 Planification de la descente
À l'approche de la destination, l'équipage doit confirmer le point de début de descente selon les conditions en vigueur. Dans le cas du B737, une carte est fixée à l'auvent pour aider à effectuer ce calcul; cette carte est en tout temps facilement accessible aux équipages de conduiteFootnote 53. L'enquête a utilisé la carte du First Air B737-200 Performance Quick Reference Handbook pour calculer un point de début de descente, en fonction des renseignements suivants :
croisière à FL310;
descente à la poussée de ralenti;
vitesse de 0,70 Mach ou de 280 nœuds au-dessus de 10 000 pieds, et de 250 nœuds en dessous de 10 000 pieds (en haut à gauche de la carte);
approche directe;
transition à train sorti;
volets en position d'atterrissage à la borne extérieure;
masse à l'atterrissage de 105 000 livres, selon le plan de vol exploitation;
composante de vent arrière de 63 nœuds au début de la descente, selon le plan de vol exploitation.
Selon la carte de distance jusqu'au toucher des roues, le début de la descente quand les vents sont calmes aurait été de 100 nm. Cependant, compte tenu d'une composante de vent arrière de 63 nœuds, il faut ajouter 17 milles (2,8 nm x 6 = 16,8), ce qui donne un début de descente à 117 nm du point de toucher des roues à CYRB. Le plan de vol exploitation du vol FAB6560 fournissait un point de début de descente calculé par ordinateur de 117 nm de la zone de toucher des roues à CYRB.
À 16 h 17 min 41 s, comme l'avion se trouvait à environ 150 nm de la zone de toucher des roues à CYRB, le P/O a signalé au commandant de bord que la vitesse sol était élevée. Bien qu'il n'ait pas été possible de déterminer avec exactitude quels étaient les renseignements utilisés par l'équipage pour calculer le début de la descente, à 16 h 17 min 44 s, le commandant a indiqué qu'il prévoyait commencer la descente à 105 nm de CYRB.
1.17.2.3 Carte des paramètres d'atterrissage et réglage du curseur de vitesse
La carte des paramètres d'atterrissage (annexe V) est utilisée pour établir et vérifier les paramètres d'atterrissage. Elle est habituellement préparée par le PNF avant d'entamer les procédures normales avant descente. D'habitude, le PNF vérifiera les renseignements de la carte des paramètres d'atterrissage après le réglage des curseurs de vitesse, mais avant l'exposé d'approche.
La carte des paramètres d'atterrissage du vol FAB6560 n'a pas été récupérée. Cependant, à 16 h 17 min 11,9 s, le commandant a fait l'exposé d'approche, incluant les vitesses d'approche et, à 16 h 24 min 40 s, les 2 pilotes ont mentionné le réglage du curseur de vitesse pendant les vérifications avant descente. Ces événements indiquent que le P/O avait vraisemblablement préparé la carte des paramètres d'atterrissage.
1.17.2.4 Avant descente
Les procédures de la liste de vérifications développée font l'objet de l'annexe U. En conformité avec l'AOMFootnote 54, la liste de vérifications avant descente, y compris une annonce aux passagers par le système de sonorisation, doit être effectuée avant d'amorcer la descente finale.
Le commandant a fait l'exposé d'approche à 16 h 17 min 11 s. Le P/O a fait une annonce aux passagers à 16 h 21 min 6 s. Comme expliqué ci-dessus, la carte des paramètres d'atterrissage avait vraisemblablement été préparée.
Les vérifications par balayage avant descente sont amorcées lorsque le PF demande l'exécution de la liste de vérifications avant descente, et la seule mesure à prendre est que le PNF doit indiquer le changement d'état avec 2 sonneries dans la cabine. Deux coups de sonnerie ont retenti à 16 h 24 min 31 s, indiquant au personnel de cabine un changement de l'état de l'avion.
Pendant les vérifications avant descente, à 16 h 24 min 37 s et à 16 h 24 min 39 s respectivement, le commandant de bord et le P/O ont confirmé le réglage des curseurs de VREF à 132 nœuds. En plus du curseur de VREF, chaque pilote devait aussi régler un curseur à 137 (VAPP, ou vitesse d'approche [VREF] corrigée en fonction du vent) et un autre curseur à 147 (VREF + 15).
Le vol FAB6560 a amorcé la descente à 16 h 23 min 40 s. Les pilotes ont exécuté la liste de vérifications avant descente à compter de 16 h 24 min 27 s. La partie relative aux compas de cette liste de vérifications a été exécutée de 16 h 24 min 39,5 s à 16 h 25 min 13,7 s. Durant cet échange, les pilotes ont vérifié que les compas étaient en mode DG. À 16 h 24 min 44 s, le commandant a déclaré, « … twenty-nine true » [traduction : vingt-neuf vrais] et, à 16 h 25 min 4 s, le P/O a déclaré, «… zero three zero » [traduction : zéro trois zéro].
À 16 h 25 min 14 s, le P/O a annoncé que les vérifications avant descente étaient terminées.
1.17.2.5 Descente
1.17.2.5.1 Techniques de descente
La descente normale à partir de l'altitude de croisière est en configuration lisse. Les aérofreins peuvent être déployés pour augmenter le taux de descente ou réduire la vitesse. Aucune information n'a été enregistrée à savoir si le commandant du vol FAB6560 a actionné l'aérofrein durant la descente. Bien que cela ne soit pas précisé dans l'AOM, il existe d'autres moyens d'ajuster le profil de descente, notamment le fait d'augmenter la distance parcourue en virant à un angle d'interception plus large ou en effectuant un virage de 360°.
1.17.2.5.2 Vérifications en approche
Les procédures de la liste de vérifications développée font l'objet de l'annexe U. Le commandant du vol FAB6560 a demandé l'exécution de la liste de vérifications en approche à 16 h 32 min 46 s. Le P/O a annoncé les 4 premiers éléments et y a répondu. Il n'y a eu aucune mention du groupe auxiliaire de bord (APU). À 16 h 33 min 9 s, le commandant a demandé au P/O d'arrêter et d'exécuter les éléments restants de la liste de vérifications à un moment ultérieur pendant l'approche. Le P/O n'a pas annoncé « In-range checklist complete down to the line » [traduction : liste de vérifications en approche terminée jusqu'à la ligne].
À 16 h 36 min 23 s, le commandant de bord a demandé au P/O de reprendre la liste aux éléments sous la ligne pointillée. Les 2 pilotes ont répondu à l'appel des sélecteurs NAV (le P/O a appelé « NAV instruments » [traduction : instruments NAV]) par « VHF NAV », et à l'appel de calage altimétrique, d'instruments et de radios par « Two-niner-eight-one inches set, cross-checked » [traduction : deux–neuf–huit–un pouces calé, contre-vérifié]. Le P/O a ensuite mentionné la fréquence de RB NDB (350 kilohertz), nécessaire pour garder le DME, et a avisé le commandant de bord que l'avertisseur d'altitudeFootnote 55 pouvait être réglé à 2200 (altitude minimale de sécurité du secteur de 25 nm). Le commandant a répondu par l'affirmative. Les radios VHF NAV n'ont pas été mentionnées. À 16 h 37, le P/O a annoncé que la liste de vérifications en approche était terminée.
1.17.2.6 Transition à l'approche finale
Il est recommandé d'utiliser le directeur de vol dans le cas d'une approche ILS (système d'atterrissage aux instruments). Selon les procédures des listes de vérifications développées de First Air, lorsqu'on utilise le pilote automatique et le directeur de vol, ceux-ci doivent être réglés comme suit [en anglais seulement]Footnote 56 :
ILS: Arm AUTO APP and steer aircraft using HDG SEL and ALT HOLD as required. Monitor APD annunciator for appropriate Armed/Capture Indications.
CAUTION: IF ABOVE THE GLIDE SLOPE, DO NOT USE AP MAN GS. INSTEAD USE CWS TO CAPTURE.
Note: If Glide Slope signals are erratic, use LOC mode on the Autopilot only.
VOR/LOC (Front Course): Arm VOR/LOC and steer aircraft using HDG SEL and ALT HOLD as required. Monitor APD annunciator for appropriate Armed/Capture Indications.
La figure 6 présente une description graphique de profils de vol pour les approches ILS, qui représente des changements de configuration.
Figure 6. Représentation du circuit d'atterrissage aux instruments (ILS) [en anglais seulement] (image : First Air B737 Operations Manual, volume 1, modification no 23, 21 juin 2011, page 03.80.3)
Le volume 1 de l'AOM fournit des représentations graphiques de l'exploitation du pilote automatique dans différents modes et phases de vol. On y trouve des graphiques pour l'exploitation en mode VOR/LOC pour la navigation VOR et pour l'approche ILS en mode AUTO APP; cependant, il n'y a pas de graphique représentant une approche ILS en mode VOR/LOC. L'annexe R comprend une représentation graphique, produite par le BST, de l'exploitation du pilote automatique pour une approche ILS en mode VOR/LOC. L'annexe S comprend une représentation graphique, produite par le BST, de l'exploitation du directeur de vol pour une approche ILS en mode AUTO APP.
À 16 h 15 min 24 s, avant d'amorcer la descente, le commandant de bord a avisé le P/O qu'il prévoyait utiliser la RNAV pour se rendre au faisceau d'alignement de piste et ensuite passer de GPS à VHF NAVFootnote 57. Cependant, pendant l'exécution de la liste de vérifications en approche, les déclarations de l'équipage indiquent qu'ils avaient sélectionné VHF NAV en vue de l'interception du faisceau d'alignement ILS de la piste 35T. Aucune discussion n'a été enregistrée entre les pilotes relativement aux sélections et aux changements de mode du pilote automatique et du directeur de vol, et cela n'était pas exigé au moment de l'accident.
On a demandé à d'autres pilotes comment ils s'y prendraient pour effectuer cette transition du vol en route à l'approche finale. Les entrevues ont révélé 2 méthodes de transition.
La première méthode était conforme à celle décrite dans l'AOM et représentée aux annexes R et S. Les pilotes qui suivaient cette méthode gardaient initialement le GPS couplé au pilote automatique en mode MAN. Puis, ils passaient à VHF NAV, réglaient le pilote automatique en mode VOR/LOC et maintenaient le cap d'interception jusqu'à ce que le pilote automatique capture l'alignement de piste et fasse un virage en rapprochement en approche finale. La position où les pilotes passaient à VHF NAV variait de 1 à 10 milles avant l'arrivée à MUSAT.
La deuxième méthode consistait à garder le GPS couplé au pilote automatique en mode MAN avec l'approche de navigation de surface (RNAV) pertinente chargée, et de laisser le GPS/pilote automatique faire le virage pour se placer en approche finale. Une fois que le vol est établi en rapprochement en approche finale, les pilotes sélectionnent VHF NAV et mettent le pilote automatique en mode VOR/LOC, puis laissent le pilote automatique suivre l'alignement de piste en rapprochement. La direction de l'entreprise a déclaré aux enquêteurs que cette méthode était inacceptable, et certains pilotes ont indiqué qu'ils décourageaient le recours à cette méthode. Des entrevues avec des pilotes ont révélé que cette méthode faisait parfois en sorte que les vérifications avant l'atterrissage étaient amorcées avant que soient terminées les vérifications en approche, parce que celles-ci avaient été interrompues jusqu'à ce que les sélecteurs de NAV soient changés de GPS à VHF.
Même si l'entraînement sur simulateur de B737 de l'entreprise comprenait des procédures d'interception pour les approches ILS couplées, le simulateur n'était pas équipé de GPS ou de système de gestion de vol (FMS). Par conséquent, il est peu probable que les pilotes instructeurs mentionnent que cette pratique non standard soit couramment utilisée. De plus, les pilotes interviewés ont déclaré ne pas utiliser cette méthode dans le cadre de la formation ou des contrôles des compétences des pilotes.
Les pilotes ont indiqué qu'ils utiliseraient le directeur de vol en mode AUTO APP, mais qu'ils préféraient éviter d'utiliser le pilote automatique en mode AUTO APP, parce que le pilote automatique avait tendance à dépasser l'alignement de descente durant la capture. Ce dépassement causerait des oscillations décroissantes au-dessus et en dessous de l'alignement de descente pendant que le pilote automatique acquiert graduellement le centre du faisceau. Ils avaient pour pratique d'avoir recours au pilote automatique en mode VOR/LOC pour suivre l'alignement de piste et d'utiliser les commandes de tangage du CWS pour capter et maintenir l'alignement de descente.
1.17.2.7 Approche initiale
Le PF commande des changements de configuration. Le membre de l'équipage qui fait la sélection surveille les indications et avise le PF lorsque l'avion se trouve dans la configuration commandée ou lorsque le système ne fonctionne pas normalement.
À 16 h 37 min 25 s, le commandant de bord a demandé la mise des volets à la position 1. Le P/O a indiqué que la sélection avait été faite et, à 16 h 37 min 40 s, il a confirmé le réglage des volets à la position 1 et l'allumage du voyant vert du dispositif de bord d'attaque.
1.17.2.7.1 Liste de vérifications avant l'atterrissage (phase initiale)
Les procédures de la liste de vérifications développée font l'objet de l'annexe U. La liste de vérifications avant l'atterrissage est exécutée en 2 phases (initiale et finale). Les vérifications par balayage avant l'atterrissage (phase initiale) sont amorcées lors de la sélection des volets à la position 5 (ou encore, sont amorcées en virage sur l'étape de base ou lorsque établi à 15 milles en finale, le plus approprié de ces 2 cas). Le PNF et le commandant prennent les mesures suivantes [en anglais seulement]Footnote 58 :
PNF:
Status Change2 Chimes
Engine Start SwitchesON
Position the Engine Start Switches toLOW IGN
RecallCHECK
Press and release the annunciator panel. Verify no lights remain illuminated when the annunciator is released.
Captain:
SpeedbrakeARMED, GREEN LIGHT
À 16 h 37 min 42 s, le commandant a demandé le réglage des volets à la position 5 et l'exécution de la liste de vérifications avant l'atterrissage. Le P/O a déclaré que la position 5 des volets avait été sélectionnée et a amorcé les vérifications avant l'atterrissage. La phase initiale de vérifications par balayage avant l'atterrissage a été exécutée en même temps que la liste de vérifications. Deux coups de sonnerie dans la cabine ont été enregistrés à 16 h 37 min 53 s, et les 3 premiers éléments de la liste de vérifications avant l'atterrissage ont été appelés par le P/O et vérifiés par le commandant. À 16 h 38 min 5 s, le P/O a déclaré que la liste de vérifications était terminée jusqu'au train et aux volets. Le P/O n'a pas mentionné que les volets étaient à la position sélectionnée.
Comme il est mentionné à la rubrique 1.17.1.2, l'AOM donne des directives pour faire une pause dans la liste de vérifications à la demande du commandant de bord. La phraséologie précisée pour le commandant est « Hold the checklist at (the item) » [traduction : interrompre la liste de vérifications à (élément)] pour prendre la pause, et « Continue the checklist » [traduction : continuer la liste de vérifications] pour reprendre la liste de vérifications à l'élément où elle a été interrompue. La pause dans la liste de vérifications avant l'atterrissage du vol FAB6560 n'a pas été amorcée par le commandant de la façon indiquée dans l'AOM, et la phraséologie normalisée n'a pas été utilisée.
Des entrevues avec des pilotes ont révélé que les vérifications avant l'atterrissage étaient souvent interrompues entre l'élément des aérofreins et le train d'atterrissage jusqu'à ce que le PF demande la sortie du train, conformément aux directives sur les phases de vol. Cependant, parce qu'il n'y avait pas de ligne pointillée sur la liste de vérifications avant l'atterrissage, toute pause dans la liste de vérifications aurait été prise à la demande du commandant au moyen de la phraséologie normalisée décrite ci-dessus. Des entrevues avec des pilotes ont révélé que les pratiques se rapprochaient davantage de la procédure d'interruption de la liste de vérifications à la ligne pointillée (c.-à-d., liste de vérifications en approche) que de la procédure ad hoc de pause de la liste de vérifications. Cela indique une adaptation qui était devenue la norme.
1.17.2.7.2 Indications initiales d'alignement de piste et de descente
L'AOMFootnote 59 décrit les annonces normalisées pour indiquer les premiers mouvements des indicateurs d'alignement de piste et de descente du poste de pilotage. Au premier mouvement vers l'intérieur de l'indicateur d'alignement de piste ou au premier mouvement positif de l'indicateur d'alignement de descente, le PNF doit annoncer « Localizer alive » [traduction : alignement de piste capté] et « Glideslope alive » [traduction : alignement de descente capté], respectivement. Aucune réponse n'est requise de la part du PF. Le P/O a annoncé le signal d'alignement de piste capté à 16 h 38 min 20 s, et le signal d'alignement de descente capté à 16 h 38 min 25 s.
1.17.2.7.3 Liste de vérifications avant l'atterrissage (phase finale)
L'AOM décrit les vérifications par balayage avant atterrissage (phase finale), amorcées lorsque le train d'atterrissage est sorti. Le PNF prend les mesures comme suit [en anglais seulement]Footnote 60 :
GearDOWN, 3 GREEN
FLAPS15, GREEN LIGHT
Le commandant a demandé la sortie du train à 16 h 38 min 38 s et le réglage des volets à la position 15 à 16 h 38 min 42 s. Le P/O a annoncé que le train était sorti et que les 3 voyants étaient verts à 16 h 38 min 48 s. Le P/O a annoncé les volets à la position 15, voyant vert à 16 h 38 min 55 s. Le P/O n'a pas annoncé que la liste de vérifications avant l'atterrissage était terminée, vraisemblablement parce que la position finale des volets n'avait pas encore été sélectionnée.
1.17.2.8 Approche finale
1.17.2.8.1 Écart initial par rapport à l'alignement de piste
L'AOMFootnote 61 décrit les annonces normalisées et les tolérances des différentes phases de vol. En approche, le PNF doit annoncer « Localizer » [traduction : alignement de piste] chaque fois que l'écart par rapport à l'axe d'alignement de piste est plus de 1 point du centre. Le PF doit répondre par « Correcting » [traduction : correction].
À 16 h 39 min 13 s, le P/O a fait une déclaration quant à l'écart latéral de l'avion par rapport à la trajectoire voulue. Il n'a pas utilisé la phraséologie particulière susmentionnée. Le commandant a accusé réception, mais il a omis de mentionner « Correcting ». Les données du FDR indiquent l'absence de toute commande de pilotage à ce moment. L'avion se trouvait à environ 1 ½ point à droite de l'axe d'alignement de piste à ce momentFootnote 62.
De 16 h 39 min 16 s à 16 h 39 min 30 s, le P/O a fait 4 autres déclarations au sujet de l'écart par rapport à la trajectoire. Le mot « localizer » n'a été entendu dans aucune de ces déclarations. Les données radar et du FDR indiquent qu'à 16 h 39 min 23 s, l'avion se trouvait à 2 points à droite de l'alignement de piste et à 1 ½ point au-dessus de l'alignement de descenteFootnote 63. À 16 h 39 min 24,2 s, le P/O a déclaré « Now we're through it » [traduction : nous l'avons maintenant traversé].
À 16 h 39 min 33 s et à 16 h 39 min 36 s, le commandant de bord a fait 2 déclarations suggérant qu'il était d'avis que le pilote automatique suivait la trajectoire correctement, mais il n'a pas utilisé le mot « correcting » dans l'une ou l'autre de ces déclarations. En même temps que la deuxième déclaration, il y a eu une manœuvre du volant de commande vers la gauche. Celle-ci a culminé à 10° à gauche, puis la direction a changé vers la droite, en passant par la position neutre jusqu'à 6° à droite. Ces manœuvres correspondent aux commandes manuelles de roulis de pilotage transparent (CWS) effectuées par le PF.
Des entrevues ont révélé que les pilotes de B737 de First Air connaissaient les annonces normalisées pour les écarts par rapport à la trajectoire d'alignement de piste de plus de 1 point du centre.
1.17.2.8.2 Déviation complète de l'alignement de piste
Les lignes directrices générales de procédure en matière de vol aux instruments au CanadaFootnote 64 indiquent que, pendant les approches ILS, l'approche doit être interrompue en cas de déviation complète de la trajectoire d'alignement de piste, et ce, en tout temps en approche finale avant la hauteur de décision. On met l'accent sur cette ligne directrice dans le cadre de la formation de base de vol aux instruments. Aucune annonce pour une déviation complète de l'alignement de piste n'est précisée ni dans le FOM, ni dans l'AOM.
À 16 h 40 min 7 s, le P/O a fait une déclaration sous forme de question concernant une déviation complète de l'alignement de piste. Au cours des 26 secondes suivantes, les pilotes ont discuté de la position de l'avion par rapport à l'alignement de piste, mais n'ont pas amorcé une approche interrompue. À 16 h 40 min 30 s, le P/O a suggéré au commandant de bord d'abandonner l'approche, mais n'a pas utilisé les expressions « go-around » [traduction : remettez les gaz] ou « missed approach » [traduction : approche interrompue]. À 16 h 40 min 33 s, le commandant a déclaré avoir l'intention de continuer l'approche.
Lorsqu'on leur a demandé si une remise des gaz était nécessaire en cas de déviation complète de l'alignement de piste, tous les pilotes interrogés ont déclaré que cette condition exigeait une remise des gaz. Cependant, tous les pilotes interrogés étaient d'accord qu'un P/O ne peut pas commander une remise des gaz, et ne pouvaient pas imaginer un P/O prenant les commandes du commandant. Ils ont déclaré que le P/O ferait probablement une suggestion au commandant de bord ou négocierait avec lui de la nécessité de prendre des mesures.
1.17.2.8.3 Annonces de vitesse indiquée et de repère d'approche finale
L'AOMFootnote 65 précise des tolérances et indique une annonce normalisée pour les vitesses en approche avant le repère d'approche finale (FAF). Le PNF doit annoncer « Airspeed » [traduction : vitesse] si la vitesse varie de +10 ou de −5 nœuds de la vitesse minimale (VAPP), et le PF doit répondre « Correcting » [traduction : correction].
À partir du moment où le vol FAB6560 est sorti du virage pour se placer en approche finale (16 h 39 min 5 s) jusqu'à ce qu'il survole par le travers le FAF (16 h 40 min 20 s), la vitesse indiquée variait entre 168 et 173 nœuds (KIAS), soit 30 nœuds de plus que la VAPP. En aucun temps au cours de cette période, la vitesse n'a-t-elle été mentionnée par l'un ou l'autre des pilotes.
L'AOMFootnote 66 précise que le PNF doit faire une annonce normalisée en rapprochement, après avoir franchi le FAF. Le PNF doit annoncer « Final approach fix, _____ feet (altitude), altimeter and instruments cross-check no flags » [traduction : repère d'approche finale, _____ pieds (altitude), altimètre et instruments contre-vérifiés, aucun drapeau].
Le vol FAB6560 a survolé le FAF (POKAN) par le travers vers 16 h 40 min 20 s. Le P/O n'a pas fait référence au FAF ni à l'état requis de l'altimètre et des instruments à ce stade ou à tout autre moment.
Une fois à l'intérieur du FAF, le PNF doit annoncer « Bug ±____ (speed difference) » [traduction : curseur ±____ (différence de vitesse)] si la vitesse dépasse ± 5 nœuds de la vitesse minimale (VAPP), et le PF doit répondre « Correcting ».
À partir du moment où le vol FAB6560 a survolé le FAF par le travers (16 h 40 min 20 s) jusqu'au moment de l'impact, la vitesse a varié entre 178 et 136 KIAS (VAPP +41 nœuds à −1 nœud). En aucun temps au cours de cette période, la vitesse n'a-t-elle été mentionnée par l'un ou l'autre des pilotes.
1.17.2.8.4 Approche instable
En 2012, la flotte mondiale d'avions à réaction commerciaux construits en Occident, de masse totale maximale supérieure à 60 000 livres et exploités par l'aviation civile, a effectué 24,4 millions de départsFootnote 67. Un article publié dans AeroSafety WorldFootnote 68 mentionne que, tandis que seulement 3,5 à 4 % des approches sont instables, 97 % des approches instables continuent jusqu'au sol, et seulement 3 % donnent lieu à une remise des gaz.
Selon les recherches effectuées, les approches instables présentent un plus grand risque pour la sécurité aérienneFootnote 69. Par conséquent, de nombreux exploitants du transport aérien intègrent des politiques et des procédures liées aux approches stabilisées dans leurs activités. Ils le font afin d'établir un moyen de défense administratif contre plusieurs conséquences négatives, telles que les sorties en bout de piste et les impacts sans perte de contrôle (CFIT).
Comme le présent événement et d'autresFootnote 70,Footnote 71,Footnote 72,Footnote 73 le démontrent, certaines de ces approches instables donnent lieu à des atterrissages avant la piste, des sorties en bout de piste, des CFIT et des contacts queue-sol. Ces situations se terminent régulièrement en accidents catastrophiques entraînant de nombreux décès.
L'article 8.13 du FOM décrit la politique de l'entreprise à l'égard des critères d'approche stabilisée et stipule clairement qu'une remise des gaz est requise en cas d'approche instable. L'article 8.13 est ainsi libellé [en anglais seulement]Footnote 74 :
All approaches shall be stabilized by 1,000 feet AFEFootnote 75 in instrument meteorological conditions (IMC) and by 500 feet AFE in visual meteorological conditions (VMC).
An approach is considered stabilized when the following criteria are met and maintained:
The aircraft is on the correct flight path;
Only small changes in heading and pitch are required to maintain the correct flight path;
The airplane speed is not more than VREF + 20 knots indicated airspeed and not less than VREF;
The airplane is in the correct landing configuration;
Sink rate is no greater than 1,000 fpm; Footnote 76 if an approach requires a sink rate greater than 1,000 fpm, a special briefing shall be conducted. Steep Slope Approach go-around criteria will be specifically defined in the aircraft Standard Operating Procedures;
Thrust setting must be above flight idle and appropriate for the airplane configuration;
ILS approaches shall be flown within one dot of the glide slope and localizer, or within the expanded localizer scale;
During a circling approach, wings should be level on final when the aircraft reaches 300 feet above airport elevation; and
All briefings and checklists have been conducted.
Unique approach procedures or abnormal conditions requiring a deviation from the above elements of a stabilized approach require a special briefing.
An approach that becomes unstable below 1,000 feet AFE in IMC or below 500 feet AFE in VMC requires an immediate go-around.
At 100 feet HAT Footnote 77 for all visual approaches, the airplane must be positioned so the flight deck is within, and tracking to remain within, the lateral confines of the runway edges extended.
As the airplane crosses the runway threshold it shall be:
Stabilized on target airspeed to within +10 knots until arresting descent rate at flare;
On a stabilized flight path using normal maneuvering; and
Positioned to make a normal landing in the touchdown zone.
Initiate a go-around if any of the preceding criteria cannot be met.
L'entreprise savait que sa politique à l'égard des approches stabilisées n'avait toujours pas été mise en œuvre avec des procédures précises pour le type d'avion. Le 19 mai 2010, le comité des normes de l'entreprise a proposé des annonces normalisées à utiliser pour mettre en œuvre la politique. Cependant, au moment de l'accident, l'AOM ne contenait pas d'annonces normalisées pour une approche instable.
Le volume 1 de l'AOM, à la page 03.60.31, traite des procédures d'atterrissage comme [en anglais seulement]Footnote 78 :
For a normal approach, the landing configuration (gear down and landing flaps) is established early on final approach. Selection of landing flap must be made prior to 1000' AGL. Stabilize aircraft on speed and profile with airplane in trim by 1000' AGL.
À 16 h 40 min 41 s, le P/O a déclaré « We're 3 mile final; we're not configged » [traduction : à 3 milles en finale; nous ne sommes pas configurés]. À ce moment, l'avion volait à une hauteur de 900 pieds au‑dessus de l'altitude de la zone de toucher des roues (annexe C), et les paramètres suivants dépassaient les critères d'approche stabilisée :
écart de plus de 2 points par rapport à l'alignement de piste;
d'importantes rectifications au cap et au tangage sont requises pour maintenir la bonne trajectoire de vol;
vitesse de 176 KIAS, VREF + 44 nœuds;
avion non configuré pour l'atterrissage;
liste de vérifications avant l'atterrissage non terminée.
À 16 h 40 min 45 s, le commandant de bord a donné au P/O la première de plusieurs instructions d'effectuer les derniers réglages des volets en vue de l'atterrissage. Parmi les demandes de configuration des volets, il y a eu plusieurs autres échanges entre les pilotes au sujet de la position de l'avion. Ils n'ont pas remis les gaz, et ils ont continué l'approche.
Le volume 1 de l'AOM, à la page 03.20.1Footnote 79, précise que le commandant doit toujours confirmer la position finale du train d'atterrissage et des volets. Cette exigence est intégrée à la liste de vérifications avant l'atterrissage décrite à l'annexe U, selon laquelle le PF et le PNF doivent tous deux répondre aux demandes finales liées au train et aux volets. À 16 h 41 min 8 s, le commandant a demandé le réglage des volets à la position 40. La réponse du P/O a confirmé que le train était sorti, mais ne fait aucunement mention de la position des volets. Le P/O n'a fait ni l'une ni l'autre des demandes relatives au train d'atterrissage et aux volets de la phase finale de la liste de vérifications avant l'atterrissage, et la réponse du commandant ne mentionnait que les volets en position 40, sans confirmation du train d'atterrissage. Le P/O n'a pas annoncé que la liste de vérifications avant l'atterrissage était terminée.
Tous les pilotes interrogés connaissaient la politique de l'entreprise à l'égard des approches stables et savaient qu'il fallait remettre les gaz si l'approche était instable à une altitude de moins de 1000 pieds; cependant, ils n'étaient pas tous capables d'en énoncer les critères. Certains pilotes ne savaient pas exactement s'il existait une SOP décrivant les mesures à prendre en cas d'approche instable. Lorsqu'on leur a demandé comment, en qualité de PNF, ils amorceraient une remise des gaz en cas d'instabilité en dessous de 1000 pieds d'altitude, les réponses des pilotes variaient : certains pilotes prenaient jusqu'à 90 secondes pour répondre; d'autres ont déclaré qu'ils annonceraient « Unstable approach, go-around » [traduction : approche instable, remettez les gaz]. Un pilote a indiqué qu'en dernier recours, il prendrait les commandes et effectuerait lui-même la remise des gaz.
1.17.2.8.5 Annonces normalisées liées à l'état de l'avion à l'intérieur du repère d'approche finale
Le volume 1 de l'AOM, à la page 03.32.4, comporte des annonces normalisées que les pilotes doivent utiliser une fois à l'intérieur du FAF (tableau 9).
Tableau 9. Annonces et tolérances normalisées liées à l'état de l'avion à l'intérieur du repère d'approche finale [en anglais seulement]Footnote 80
TOLERANCES/SITUATION
PNF CALLOUT
PF/PNF RESPONSE
GLIDESLOPE IN EXCESS OF 1 DOT
“GLIDESLOPE”
“CORRECTING”
RATE OF DESCENT IN EXCESS OF 1200 FPM
“SINK RATE”
“CORRECTING”
PITCH ANGLE APPROACHING ± 5° OF STABILIZED PITCH ATTITUDE
“PITCH”
CAUTION: BE ALERT TO
WINDSHEAR INDICATIONS
“CORRECTING”
THRUST LESS THAN 1.1 EPR AT ALTITUDE LESS THAN 1000′ AGL
“THRUST”
“CORRECTING”
NOTE: When specific circumstances require aircraft operation outside of the above tolerances, the PF should advise the PNF of his or her intentions and the specific reason for doing so.
À partir de 16 h 40 min 50 s jusqu'au moment de l'impact, l'écart de l'avion par rapport à l'alignement de descente était supérieur à 1 point. Durant cette période, l'alignement de descente n'a été mentionné qu'une seule fois, à 16 h 41 min 26 s, lorsque le commandant a fait un commentaire sur la présence de l'indicateur d'alignement de descente. À 16 h 41 min 28 s, le P/O a répondu qu'il était au braquage maximal. Les annonces « Glideslope » et « Correcting » indiquées n'ont pas été utilisées.
TC fournit des lignes directrices de procédure générales pour le vol aux instruments. Les lignes directrices pour les approches ILS stipulent que si l'aéronef est en rapprochement sur l'alignement de piste au-dessus de la trajectoire de descente, le pilote doit prendre toutes les précautions nécessaires puisque dans ce cas, un taux de descente excessif est requis pour regagner la trajectoire de descenteFootnote 81.
Le taux de descente était relativement stable à environ 700 pieds par minute (pi/min) de 16 h 40 min 20 s jusqu'à 16 h 40 min 48 s. À ce moment, le taux de descente a diminué, se stabilisant à environ 200 pi/min jusqu'à 16 h 41 min 16 s. Le taux de descente a ensuite augmenté, dépassant 1200 pi/min à partir de 16 h 41 min 42 s jusqu'à 16 h 41 min 48 s. À partir de ce moment jusqu'au moment de l'impact à 16 h 41 min 51,8 s, le taux de descente a diminué. En aucun temps au cours de la période pendant laquelle le taux de descente a dépassé 1200 pi/min les pilotes ont-ils mentionné le taux de descente.
À 16 h 41 min 18 s, l'angle de tangage a commencé à diminuer, passant de +2° à -4,8° à 16 h 41 min 42 s. Ni l'un ni l'autre des pilotes n'a fait de commentaire sur ce changement d'angle de tangage.
À 16 h 40 min 49 s, l'avion volait en dessous de 1000 pieds agl, et la poussée des 2 moteurs avait été réduite à un rapport de pression moteur (EPR) sous 1,1. La poussée du moteur gauche a augmenté au-dessus de 1,1 EPR à 16 h 40 min 59 s, suivie de celle du moteur droit à 16 h 41 min 6 s. Ni l'un ni l'autre des pilotes n'a fait de commentaire sur le réglage de poussée qui était faible.
Le volume 1 de l'AOM, à la page 03.32.1Footnote 82, énonce la phraséologie normalisée que le PNF doit employer pour indiquer la proximité de la hauteur de décision pendant une approche ILS. À 100 pieds au-dessus de la hauteur de décision, le PNF doit annoncer « 100 feet to minimums » [traduction : 100 pieds aux minimums]. Le vol FAB6560 a atteint 100 pieds au-dessus de la hauteur de décision à 16 h 41 min 48 s. Le P/O n'a rien déclaré relativement à la hauteur au-dessus de la hauteur de décision.
1.17.2.9 Remise des gaz
1.17.2.9.1 Annonces normalisées et procédure de remise des gaz
Le volume 1 de l'AOM, page 03.32.1Footnote 83, précise que, pendant une approche ILS, le PNF doit faire une annonce à la hauteur de décision pour indiquer que l'avion a atteint l'altitude minimale et indiquer si la piste est en vue. Les annonces normalisées sont « Minimums, runway in sight » [traduction : minimums, piste en vue] ou « Minimums, no contact » [traduction : minimums, pas de contact]. La réponse normalisée du PF est « Landing » [traduction : atterrissage] ou, si un contact visuel n'est pas établi, « Go-around thrust, flap ____ » [traduction : poussée de remise des gaz, volets ____]Footnote 84.
L'annonce normalisée du PNF fournit de l'information au PF sur la position de l'avion et l'état des références visuelles. Après l'annonce du PNF, le PF prend la décision de continuer l'approche ou de remettre les gaz.
Le volume 1 de l'AOM décrit la procédure de remise des gaz pour un avion équipé du pilote automatique SP77 à la page 03.60.35, reproduite à la figure 7.
Figure 7. Procédure de remise des gaz du B737 de First Air [en anglais seulement] [tableau tiré de : First Air B737 Operations Manual, volume 1, modification no. 23, 21 juin 2011, GO-AROUND PROCEDURE (SP77), page 03.60.35.]
La procédure décrite à la figure 7 comporte une annonce que doit faire le PF pour amorcer une remise des gaz. Cette annonce, « Go-around, flaps 15 » [traduction : remise des gaz, volets 15], est différente de l'annonce normalisée figurant à la page 03.32.1.
Ni l'une ni l'autre de ces parties de l'AOM n'indique que le PNF doit faire une annonce de remise des gaz.
1.17.2.9.2 Politique de remise des gaz sans égard à la faute
L'article 8.12 du FOM décrit les orientations de la politique de l'entreprise à l'égard de la remise des gaz « sans égard à la faute » (ci-dessous) [en anglais seulement]Footnote 85. La politique a été mise en œuvre avant 2008.
In order to enhance safety and to reduce the risk of approach and landing accidents, First Air maintains a “No Fault” go-around policy.
In addition to the requirement to perform a go-around, in the event that an approach is not stabilized, a pilot may conduct a go-around for any reason (i.e. lack of adequate visual references, weather conditions not suitable, conflicting traffic, and loss of contact with ATC) without fear of disciplinary action from the Company.
1.17.2.9.3 Politique de First Air à l'égard du dispositif avertisseur de proximité du sol
L'article 2.22.5 du FOMFootnote 86 stipule que le manuel de vol pertinent contient des procédures particulières à suivre en cas d'une activation en vol du GPWS ou du TAWSFootnote 87 dans le cadre d'un vol selon les règles de vol aux instruments.
Le volume 1 de l'AOM, à la page 04.200.31, indique une procédure à utiliser pour éviter le relief. La procédure précise que l'activation de l'avertissement « pull up » [traduction : remonter] ou toute autre situation menant à un vol inacceptable en direction du relief sont considérées comme présentant des risques de contact avec le relief. La description de la procédure d'évitement du relief est reproduite à la figure 8.
Figure 8. Procédure d'évitement du relief [en anglais seulement] (tiré de : First Air B737 Operations Manual, volume 1, modification n0 23, 21 juin 2011, page 04.200.31).
*Maximum thrust is defined as maximum certified thrust.
1.17.2.9.4 Alertes du dispositif avertisseur de proximité du sol au cours du vol FAB6560 et amorce de la remise des gaz
L'équipage du vol FAB6560 n'a pas amorcé de remise des gaz, ni au point de déviation complète de l'alignement de piste, ni à 3 milles, lorsque le P/O a indiqué qu'ils n'étaient pas configurés (dans une approche instable). À 16 h 41 min 47,7 s, le GPWS a émis une alerte sonore, soit « sink rate » [traduction : vitesse verticale de descente]. À 16 h 41 min 49 s, le P/O a déclaré « Go for it » [traduction : allons-y].
À 16 h 41 min 49,2 s, le GPWS a commencé à émettre une alerte sonore « minimums…minimums ». Entre les 2 « minimums » (16 h 41 min 50,1 s), le P/O a déclaré « Go-around » [traduction : remise des gaz]. À 16 h 41 min 51,2 s, le commandant a déclaré « Go-around thrust » [traduction : poussée de remise des gaz]. Le commandant n'a pas mentionné la sélection des volets dans son annonce de remise des gaz. À 16 h 41 min 51,8 s, le vol FAB6560 est entré en collision avec le relief.
1.17.3 Processus de surveillance de la sécurité du système de gestion de la sécurité de First Air
1.17.3.1 Rapports de service de ligne
L'article 9.6 du FOM décrit les rapports de service de ligne. Le rapport de service de ligne est envoyé au commandant de bord au début de chaque période de service, en même temps que le plan de vol exploitation. Il s'agit du principal moyen d'obtenir de la rétroaction des opérations aériennes pour faire état de problèmes. Le rapport doit être rempli au terme de chaque vol. Le contenu du rapport de service de ligne est lu par l'administration des opérations aériennes et le pilote en chef. Tous les problèmes indiqués font l'objet d'un suivi, peu importe le service en cause. À la fin de toute période de service, il incombe au commandant de bord d'envoyer par télécopieur, dans les plus brefs délais, le rapport de service de ligne rempli au service de répartition des vols.
Parmi les éléments à inclure au rapport de service de ligne, il y a une description très détaillée de tout événement opérationnel anormal.
1.17.3.2 Rapports de sécurité aérienne
L'article 9.7 du FOM traite des rapports de sécurité aérienne. Un rapport de sécurité aérienne doit être rempli lorsque l'une des exigences au verso du formulaire est respectée. Il incombe au commandant de bord d'acheminer les rapports de sécurité aérienne au service de répartition des vols le plus rapidement possible.
1.17.3.3 Incidents non signalés
1.17.3.3.1 Généralités
L'enquête a cerné 2 incidents antérieurs, qui avaient des similitudes avec le cas présent, mettant en cause des équipages de B737 de First Air basés à CYZF. Se reporter plus bas pour obtenir de plus amples renseignements sur les 2 incidents. Ni l'un ni l'autre de ces incidents n'a été signalé à l'entreprise, et les gestionnaires de l'entreprise ne savaient pas que ces incidents s'étaient produits. L'enquête a examiné les processus du système de gestion de la sécurité (SGS) de First Air pour le signalement à l'interne de dangers, des incidents et des accidents afin de déterminer si les données recueillies faisaient l'objet d'un suivi et étaient utilisées pour promouvoir la sécurité de l'exploitation.
1.17.3.3.2 Incident 1
Dans les semaines qui ont précédé l'accident à CYRB, un équipage de conduite de B737 de First Air a eu des problèmes avec les instruments de navigation pendant une approche dans des conditions météorologiques de vol aux instruments (IMC) à un autre aéroport au Nunavut. Bien que ces événements se soient produits sur un aéronef différent de celui en cause dans l'accident à CYRB, le commandant du vol FAB6560 était également le commandant en cause dans cet incident.
L'équipage de conduite avait planifié une approche RNAV à l'aéroport. À ce moment, il ventait et pleuvait, et le ciel était couvert à environ 600 pieds agl. Le commandant de bord était le PF. Parce que l'aéroport est à l'intérieur du NDA, les opérations aériennes doivent être effectuées par rapport au nord vrai. Avant la descente, l'équipage a changé les compas du mode magnétique au mode DG en prévision de l'approche.
La déclinaison magnétique à l'aéroport était de 32° à l'est. Il n'a pas été possible de confirmer si, pendant le réglage des compas au mode DG, les compas ont été réglés au cap vrai. Le cap n'a pas été rajusté à 10 000 pieds.
Durant la phase finale de l'approche, le pilote automatique était couplé au FMS et suivait la trajectoire d'approche finale. La flèche de route de l'indicateur de situation horizontale (HSI), qui avait été réglée sur la trajectoire d'approche finale, n'était pas correctement alignée avec la direction du vol. Lorsque l'avion se trouvait en approche finale, le cap déviait d'approximativement 30° du cap de la piste, et la flèche de route pointait environ 30° vers la gauche. Pendant que l'avion descendait sous la couche de nuages, on a amorcé un virage dans le but d'aligner l'avion avec la flèche de route. À ce moment, l'avion étant à environ 1,5 nm du seuil de la piste, on a acquis le contact visuel avec la piste, et le virage a été interrompu.
L'approche s'est poursuivie, et l'appareil a atterri sans incident. Cet événement n'a pas été signalé à l'entreprise dans un rapport de service de ligne du commandant, un rapport de sécurité aérienne ou un rapport d'enquête de situation comportant des dangers.
1.17.3.3.3 Incident 2
Plus tôt au cours de l'été 2011, dans le cadre d'un vol nolisé au Nunavut, un autre équipage de B737 de First Air a également eu des problèmes avec les instruments de navigation pendant une approche dans des conditions IMC. Ces événements se sont produits avec C-GNWN, cependant ni l'un ni l'autre des pilotes du vol FAB6560 n'était en cause.
À l'arrivée à destination, il y avait une couche nuageuse dont la base se situait à environ 200-300 pieds agl, exigeant que l'équipage effectue une approche IFR. Parce que l'aéroport est situé dans l'espace aérien intérieur du Sud, les opérations aériennes dans cet espace doivent être effectuées par rapport au nord magnétique. À un certain point avant l'arrivée, les compas ont été changés du mode DG au mode magnétique.
Le vol a reçu du contrôle de la circulation aérienne (ATC) les vecteurs radar pour une approche ILS/DME. Le pilote automatique de l'avion était activé. Cependant, l'avion a dépassé le faisceau d'alignement de piste, et le pilote automatique ne l'a pas capté. L'équipage a piloté l'avion manuellement pour retrouver l'alignement de piste, mais a commencé à s'inquiéter quand les indications des instruments de navigation lui ont semblé insensées. Bien que l'avion fût établi sur l'alignement de piste, le relèvement du NDB semblait être erroné de 10° à 15°, donnant l'apparence qu'il y avait un fort vent de travers.
À part le pilote automatique ne capturant pas l'alignement de piste, l'équipage n'a pas remarqué d'autres indications d'anomalies, telles que des voyants de comparateur. Cependant, à environ 3 milles du seuil de la piste, l'approche a été interrompue en raison des indications des instruments de navigation. Une fois rendu à une altitude sécuritaire, l'équipage a vérifié les compas et a déterminé qu'ils étaient légèrement erronés. Ils ont pensé que cet écart avait pu jouer un rôle dans l'incapacité du pilote automatique d'intercepter le faisceau d'alignement de piste. L'équipage a réaligné les compas à l'aide d'un relèvement GPS sur un NDB, en plus de confirmer que les récepteurs de navigation étaient réglés correctement.
L'équipage a ensuite effectué une deuxième approche ILS/DME et a atterri sans incident. Même si l'équipage croyait que la synchronisation des compas était un peu lente après la sélection du mode magnétique, l'équipage ne croyait pas que les compas étaient inutilisables. Par conséquent, l'équipage n'a pas consigné de défectuosité de compas dans le carnet de bord. De plus, même si une remise des gaz est un événement dont le signalement est obligatoire, aucune mention de l'incident n'a été faite dans le rapport de service de ligne de la journée du commandant de bord, et aucun rapport de sécurité aérienne ou rapport d'enquête de situation comportant des dangers n'a été soumis. Une recherche du CADORS (Système de compte rendu quotidien des événements de l'aviation civile) de TC n'a pas permis de trouver l'événement.
Cependant, le vol en question a fait l'objet d'une discussion avec le commandant du vol FAB6560. L'incident 2 a été mentionné par le commandant du vol FAB6560 peu de temps avant l'impact.
1.17.3.3.4 Mise en œuvre et fonctionnement du système de gestion de la sécurité de First Air
First Air est exploitée sous le régime de la sous-partie 705Footnote 88 du RAC, et était tenue d'avoir un SGS depuis le 31 mai 2005, date d'entrée en vigueur du règlement pertinentFootnote 89. La mise en œuvre d'un SGS nécessite beaucoup de temps. Comme tous les exploitants régis par la sous-partie 705, First Air était exploitée en vertu d'une exemption à la réglementation permettant une mise en œuvre du SGS en 4 phases sur 3 ans.
À la fin de la phase 4 de la mise en œuvre du SGS de First Air, en septembre 2009, TC a effectué une évaluation du SGS. Cette évaluation avait pour but de vérifier si l'organisation avait effectivement mis en œuvre son SGS. La portée de l'évaluation comprenait tous les processus du SGS et les activités connexes menées aux termes du certificat d'exploitation aérienne et du certificat d'organisme de maintenance agréé de l'entreprise. L'évaluation portait sur la période allant de janvier 2008 à septembre 2009.
Le tableau 10 présente les 6 composantes du cadre de SGS et leurs éléments correspondants.
Tableau 10. Composantes et éléments d'un cadre de système de gestion de la sécurité (basé sur les modules de système de gestion de la sécurité de Transports Canada [TC])
Composante
Élément
1. Plan de gestion de la sécurité
1.1 Politique sur la sécurité
1.2 Politique non punitive de rapports sur la sécurité
1.3 Rôles, responsabilités et participation des employés
1.4 Communications
1.5 Planification de la sécurité, objectifs et buts
1.6 Performance measurement
1.7 Mesure du rendement
2. Documentation
2.1 Détermination et maintien des règlements pertinents
2.2 Documentation sur le SGS
2.3 Gestion des dossiers
3. Surveillance de la sécurité
3.1 Processus réactifs
3.2 Processus proactifs
3.3 Enquêtes et analyses
3.4 Gestion des risquest
4. Formation
4.1 Formation, sensibilisation et compétences
5. Assurance qualité
5.1 Assurance qualité opérationnelle
6. Préparatifs d'urgence
6.1 réparatifs et interventions d'urgence
Une politique non punitive de rapports sur la sécurité (élément 1.2) fait partie intégrale d'un SGS. L'évaluation a déterminé que la politique de First Air satisfaisait aux exigences réglementaires minimales, et que les employés interrogés dans l'ensemble de l'organisation comprenaient les mesures non punitives et se sentaient à l'aise à l'égard de ces politiques. De nombreux employés ont déclaré que la politique en matière de rapports était énoncée dans les procédures de l'entreprise et qu'elle était complètement intégrée à l'exploitation quotidienne.
Dans son rapport d'évaluation daté du 5 octobre 2009Footnote 90, TC a déclaré que durant les premières phases de la mise en œuvre du SGS, la conception d'un système de gestion qui convenait à l'organisation avait posé quelques difficultés à l'entreprise. Le rapport a conclu que l'entreprise respectait les principes d'un système de gestion de la sécurité dans le cadre duquel tous les employés sont habilités à participer activement au rendement proactif de l'entreprise en matière de sécurité.
Le SGS de First Air est consigné dans la section 13 du Corporate Quality Assurance Manual de l'entreprise, qui décrit son système de gestion de la qualité, fondé sur les principes suivants :
approche axée sur le client;
leadership;
participation des employés;
approche systémique en matière de gestion;
approche orientée sur les processus;
approche factuelle à la prise de décisions;
amélioration continue.
1.17.3.4 Processus de signalement des incidents et des dangers
Afin d'améliorer la sécurité, les employés de First Air sont tenus de signaler tous les incidents et tous les dangersFootnote 91. L'entreprise donne suite aux rapports de sécurité en mettant l'accent sur les améliorations et la mise en œuvre de mesures correctives plutôt que de mesures punitives.
Le service de gestion de la sécurité de l'entreprise compte 4 employés à temps plein. En outre, s'il y a lieu, un enquêteur technique est chargé de mener des enquêtes qui fournissent l'information nécessaire pour mettre en œuvre des mesures de sécurité.
Les renseignements sur les dangers peuvent être communiqués à l'entreprise sous de nombreuses formes, notamment :
un rapport de sécurité aérienne;
un rapport d'enquête de situation comportant des dangers;
un courriel.
La liste de tous les événements à signaler est inscrite, en 2 sections, au verso du formulaire de rapport de sécurité aérienne de l'entreprise. La première section est la liste des événements qui doivent être signalés au BST. La deuxième est la liste de tous les événements que les employés sont tenus de signaler à First Air. Il convient de noter qu'une remise des gaz fait partie de la liste des événements de la deuxième section, soit les événements qu'il faut obligatoirement signaler à l'entreprise. De plus, le dernier élément de la liste des événements à signalement obligatoire est formulé ainsi [en anglais seulement] : « Any other event where safety standards are significantly reduced, or any event which may provide useful information for the enhancement of flight safety ».
Tous les rapports de sécurité sont enregistrés dans un système de bases de données sur la qualité de l'aviation, qui a été acheté et installé au milieu de 2011. Par conséquent, la nouvelle base de données ne contient pas toutes les données recueillies depuis le début du SGS à First Air.
Dès la réception d'un rapport de sécurité, une évaluation a lieu, et une décision est prise quant au bien-fondé de mener une enquête. La personne qui a présenté le rapport est informée de la décision.
1.17.4 Méthodes de surveillance des opérations aériennes de First Air
First Air utilise plusieurs méthodes pour surveiller le rendement des équipages de conduite ainsi que le respect des politiques et des procédures de l'entreprise, notamment :
formation technique initiale au sol, qui donne une occasion de familiariser les pilotes avec la philosophie d'exploitation, les politiques (manuel d'exploitation [FOM]) et les procédures (manuel de vol [AOM]) de l'entreprise;
formation initiale sur simulateur, au cours de laquelle les pilotes reçoivent une formation qui renforce la philosophie d'exploitation, les politiques et les procédures de l'entreprise;
contrôles des compétences des pilotes, qui sont des contrôles de rendement effectués dans un simulateur dans le but de vérifier si les pilotes satisfont à la norme requise et de valider le processus de formation;
formation préparatoire au vol, dispensée par des pilotes instructeurs dans le but d'exposer les pilotes à l'environnement opérationnel de l'entreprise et de renforcer davantage la philosophie d'exploitation, les politiques et les procédures de l'entreprise;
vérifications des compétences en route, qui ont lieu après la formation préparatoire au vol, dans le but de vérifier si le rendement des pilotes satisfait à la norme requise;
formation périodique, comprenant une formation périodique au sol et sur simulateur offerte annuellement, qui permet de renforcer la philosophie d'exploitation, les politiques et les procédures de l'entreprise;
contrôles périodiques des compétences des pilotes et vérifications périodiques des compétences en route, procurant chaque année à l'entreprise une autre occasion de vérifier si les pilotes satisfont à la norme requise et de vérifier la conformité aux politiques et aux procédures de l'entreprise;
rapports de service de ligne (rubrique 1.17.3.1), procurant à la direction de l'entreprise une occasion limitée de surveiller les opérations aériennes selon ce qui est signalé par les commandants de bord;
vols avec la direction, où les gestionnaires des opérations aériennes de l'entreprise volent périodiquement avec des pilotes de ligne, procurant ainsi une occasion à la direction d'observer directement le rendement des pilotes.
1.17.5 Autres méthodes de surveillance des opérations aériennes
1.17.5.1 Suivi des données de vol
Le suivi des données de vol (FDM) est un programme destiné à améliorer la sécurité aérienne en fournissant plus d'information et une meilleure vue d'ensemble des opérations aériennes grâce à un enregistrement sélectif automatisé et à l'analyse de données objectives générées en cours de vol. Le FDM est aussi connu sous le nom d'assurance de la qualité des opérations aériennes ou d'analyse des données de vol.
Un programme de FDM a pour but de permettre à un exploitant de déterminer, de quantifier, d'évaluer et de gérer les risques opérationnels par la collecte discrète et anonyme de données de vol électroniques tirées d'activités opérationnelles courantes. L'analyse proactive et non punitive de ces données dépersonnalisées améliore la sécurité aérienne par l'élaboration et la mise à jour de programmes de formation, de politiques et de procédures visant à gérer les risques décelés et à mesurer les résultats de ces initiatives.
Le FDM a été mis en œuvre dans de nombreux pays, et il est largement reconnu comme un outil rentable d'amélioration de la sécurité. Aux États-Unis et en Europe, grâce à l'OACI, de nombreux transporteurs ont un tel programme depuis des années. Certains exploitants d'hélicoptères effectuent déjà la surveillance des données de vol, et la FAA a formulé une recommandation à cet égard.
Au Canada, les transporteurs ne sont pas tenus d'avoir un programme de FDM. Malgré cela, de nombreux exploitants téléchargent régulièrement leurs données de vol pour effectuer le FDM en exploitation normale. Les transporteurs aériens qui se sont dotés de programmes de FDM ont eu recours aux données de vol pour déceler des problèmes comme les approches non stabilisées et les approches précipitées, le dépassement des vitesses maximales volets sortis, les angles d'inclinaison excessifs après le décollage, les événements d'échauffement excessif du moteur, le dépassement des seuils de vitesse recommandés, les avertissements du GPWS ou du TAWS, l'amorce d'un décrochage, les cadences de rotation excessives, les sorties de trajectoire de descente et l'accélération verticaleFootnote 92.
À la suite de l'enquête aéronautique A11W0048 du BST, le Bureau a recommandé au ministère des Transports de veiller, en collaboration avec l'industrie, à éliminer les obstacles et à élaborer des pratiques recommandées en ce qui a trait à la mise en œuvre du suivi des données de vol (recommandation A13-01)Footnote 93.
First Air a un programme de FDM depuis 2010. Cependant, l'entreprise a connu des problèmes avec la qualité des données et l'obtention de rapports du fournisseur de services sous contrat, et elle a mis fin à son contrat en 2011. Au moment de l'accident, le programme de FDM de l'entreprise passait à un nouveau fournisseur de services, et l'analyse des données n'était pas effectuée. Durant la transition, le téléchargement de données s'est poursuivi afin d'avoir accès à des données qu'on pourrait utiliser lorsque le nouveau système serait en place.
1.17.5.2 Audit de sécurité en service de ligne
Un audit de sécurité en service de ligne (LOSA) est une méthode qui permet aux exploitants aériens de mieux comprendre les risques présents dans leurs opérations aériennes. On décrit le programme LOSA de la façon suivante [en anglais seulement]Footnote 94 :
… a critical organizational strategy aimed at developing countermeasures to operational errors. The objective of this monitoring programme, built around Threat and Error Management (TEM) framework, is to identify threats to aviation safety, minimize the risks such threats may generate and implement measures to manage human error in operational contexts. LOSA enables operators to assess their level of resilience to systemic threats, operational risks and front-line personnel errors, thus providing a principled, data-driven approach to prioritise and implement actions to enhance safety.
LOSA uses highly trained observers to collect data about flight crew behaviour and situational factors on “normal” flights. By monitoring the flight from the cockpit, the observer can learn much about flight crew behaviour and crews' strategies for managing threats, errors and undesirable states.
LOSA is closely linked with Crew Resource Management (CRM) training. A particular strength of LOSA is that it identifies examples of superior performance that can be reinforced and used as models for training.
Le programme LOSA est un programme volontaire, et First Air n'y a pas participé.
1.17.6 Services de la circulation aérienne
1.17.6.1 Espace aérien du Canada
L'espace aérien intérieur canadien se divise en un espace aérien inférieur, qui comprend tout l'espace aérien situé en dessous de 18 000 pieds au-dessus du niveau de la mer (asl), et en un espace aérien supérieur, qui comprend tout l'espace aérien à partir de 18 000 pieds asl et au-dessus. L'espace aérien contrôlé dans l'espace aérien supérieur se divise en 3 régions distinctes : les régions de contrôle du Sud, du Nord et de l'Arctique. Les dimensions latérales et verticales sont illustrées à la figure 9 et à la figure 10. L'espace aérien intérieur canadien se divise aussi géographiquement en espace aérien intérieur du Sud (SDA) et en espace aérien intérieur du Nord (NDA). Les frontières latérales du NDA englobent les régions de contrôle du Nord et de l'Arctique, illustrées à la figure 9. L'alinéa 602.34(1)b) du RAC exige l'établissement des altitudes de croisière en fonction de la route vraie dans le NDA. En outre, dans les publications d'information de vol IFR, les routes sont illustrées par rapport au nord vrai.
Figure 9. Frontières latérales de l'espace aérien supérieur (image : Transports Canada [TC], TP 14371 - Manuel d'information aéronautique de Transports Canada [AIM de TC], RAC – Règles de l'air et services de la circulation aérienne, 17 octobre 2013, section 2.6, figure 2.3)
L'alinéa 602.32(1)a) du RAC précise qu'il est interdit à quiconque d'utiliser un aéronef à une vitesse supérieure à 250 KIAS à une altitude inférieure à 10 000 pieds asl. À 16 h 32 min 35 s, le vol FAB6560 a traversé 10 000 pieds en descente à 310 KIAS, et a décéléré graduellement durant la descente, atteignant 250 KIAS au moment de franchir 5430 pieds asl. Des entrevues avec des pilotes ont révélé que la limite de vitesse de 250 KIAS en dessous de 10 000 pieds était occasionnellement dépassée pour ajuster le profil de descente.
Figure 10. Frontières verticales de l'espace aérien supérieur (image : Transports Canada [TC], TP 14371 - Manuel d'information aéronautique de Transports Canada [AIM de TC], RAC – Règles de l'air et services de la circulation aérienne, 17 octobre 2013, section 2.6, figure 2.4)
1.17.6.2 Procédures dans l'espace aérien non contrôlé
Le vol FAB6560 a quitté CYZF, situé dans la région de contrôle du Sud, a poursuivi sa route à travers la région de contrôle du Nord et a finalement pénétré dans la région de contrôle de l'Arctique au moment d'approcher de CYRB. Pendant la phase de montée et de croisière (FL310) du vol, l'avion est demeuré dans l'espace aérien contrôlé. Pendant la descente vers CYRB, l'avion est entré dans un espace aérien non contrôlé au moment où il descendait sous le FL270. Dans des circonstances normales, à ce stade, le centre de contrôle régional (ACC) d'Edmonton de NAV CANADA autoriserait l'avion à quitter l'espace aérien contrôlé. L'équipage continuerait ensuite la descente et communiquerait avec la station radio d'aérodrome communautaire (CARS)Footnote 95 de CYRB sur la fréquence obligatoire (MF) en s'approchant de l'aéroport. Dans le cas de CYRB, cette communication doit avoir lieu avant d'arriver à 25 nm de l'aéroport et à 5300 pieds asl ou moinsFootnote 96. L'observateur/communicateur de la CARS ne fournit pas de services d'espacement de la circulation. À l'intérieur de la zone MF d'un aérodrome non contrôlé, les pilotes doivent communiquer avec les autres pilotes sur la MF afin de s'assurer qu'il n'y a aucun conflit avec d'autres aéronefs.
Le pilote d'un aéronef exploité selon les procédures IFR qui prévoit effectuer une approche et un atterrissage à un aérodrome non contrôlé doit diffuser, sur la MF, les intentions du commandant de bord concernant l'exploitation de l'aéronef. L'heure d'atterrissage prévue doit être communiquée 5 minutes avant d'amorcer la procédure d'approche. De plus, des rapports de position sont requis aux points suivants :
au passage du repère en éloignement, lorsque le commandant de bord a l'intention d'effectuer un virage conventionnel ou, si ce n'est pas son intention, à la première interception de la trajectoire d'approche finale;
au passage du repère d'approche finale, ou 3 minutes avant l'heure d'atterrissage prévue s'il n'existe aucun repère d'approche finale;
en approche finale.
1.17.6.3 Format des NOTAM
Les avis aux aviateurs (NOTAM) sont des outils de transmission de renseignements aéronautiques destinés aux usagers. NAV CANADA est l'organisme qui publie les NOTAM, et a pour seule responsabilité de s'assurer du respect des procédures appropriées pour la transmission des renseignements. L'auteur des renseignements est responsable de l'exactitude des renseignements fournis en vue de leur publication. Dans ce cas-ci, les forces armées étaient l'auteur du contenu des NOTAM.
La lettre N suivant le mot NOTAM dans la ligne indiquant le numéro de NOTAM et la zone touchée signifie qu'il s'agit d'un nouveau NOTAM. Le premier NOTAM publié concernant la région de contrôle terminal militaire (MTCA) le 2 août contenait la ligne « 111404 NOTAMN CZEG Edmonton FIR ». La dernière ligne du NOTAM indiquait la période pendant laquelle le NOTAM serait en vigueur : « 1108061300 TIL 1108280100 »Footnote 97.
La première révision du NOTAM était désignée comme suit : « 111424 NOTAMR 111404 CZEG Edmonton FIR ». Dans ce NOTAM, la dernière ligne était : « 1108101300 TIL 1108280100 ». Ici, la lettre R suivant le mot NOTAM indique qu'il s'agit du remplacement d'un NOTAM antérieur, mais il n'y a rien pour indiquer quel élément d'information a été révisé parmi les nombreux éléments du NOTAM. Les remplacements subséquents sont indiqués par la même lettre R, suivie du numéro du NOTAM précédent qui est remplacé. Rien d'autre n'indique ce qui a été modifié.
La lettre C suivant le mot NOTAM indique l'annulation d'un NOTAM.
Au cours de l'événement en cause, aucun des pilotes en rapprochement de CYRB ne savait que la MTCA n'était pas en vigueur. En outre, le contrôleur de l'ACC d'Edmonton de NAV CANADA responsable du vol FAB6560 pensait que la MTCA était en vigueur parce qu'il a avisé les pilotes du vol FAB6560 qu'ils entreraient à nouveau dans l'espace aérien contrôlé au FL200, et leur a demandé de contacter la fréquence terminale de la MTCA.
Les NOTAM figurant sur le site Web de la météorologie à l'aviation (AWWS) de NAV CANADA ne contiennent pas la désignation N ou R pour aider les équipages à déterminer s'il s'agit de nouveaux NOTAM ou de NOTAM de remplacement. L'enquête a déterminé que plusieurs vols ont interprété l'information dans les NOTAM comme quoi la MTCA était en vigueur.
Le système de génération des NOTAM a un code d'arrière-plan lié à la lettre R, C ou N qui déclenche une activité automatisée concernant la façon dont le logiciel traite un NOTAM. Les équipages qui reçoivent leurs NOTAM par cette source de distribution peuvent voir les codes et se rendre compte qu'il y a eu des modifications, mais ils doivent les parcourir pour voir ce qui a été modifié. Il peut être difficile de déceler une modification qui ne porte que sur 1 seul chiffre dans la ligne de la date d'entrée en vigueur. L'AWWS n'a pas besoin de ces codes, et par conséquent n'utilise pas les lettres. Les équipages de conduite doivent donc traiter chaque NOTAM sur l'AWWS comme s'il s'agissait d'un nouveau NOTAM.
1.17.6.4 Contrôle de la circulation aérienne militaire de Resolute Bay
L'organisme militaire responsable de fournir l'équipement de l'ATC et de gérer l'ATC à CYRB dans le cadre de l'opération NANOOK était le 8e Escadron de transmission et de contrôle (AIR) (8 ECCA), basé à Trenton (Ontario). L'escadron a de l'expérience sur le plan des opérations de déploiement et constitue fréquemment des unités radar d'approche de précision (PAR) pour appuyer l'opération BOXTOP, soit l'opération de réapprovisionnement dans le Grand Nord de la station de recherche Alert. De plus, tous les ans, l'escadron organise une opération complète d'aérodrome à la base militaire de Wainwright (Alberta). Cette opération à CYRB devait être la première du genre en milieu civil.
8 ECCA n'a pas d'autres ressources spécialisées de contrôle que les contrôleurs PAR. Pour combler le besoin de contrôleurs tour et terminal, 8 ECCA communique ses exigences à la 1re Division aérienne du Canada à Winnipeg, qui parcourt ensuite les bases des Forces canadiennes à la recherche de candidats. Les contrôleurs sont sélectionnés et envoyés au 8 ECCA à Trenton avant le déploiement pour se familiariser, acquérir de l'information et être testés relativement aux procédures d'exploitation et locales en vigueur sur les lieux. Les contrôleurs doivent s'assurer qu'ils connaissent toujours parfaitement le contenu du MANOPS ATC de NAV CANADA et du supplément des Forces canadiennes.
Comme il a été mentionné précédemment, le radar militaire installé pour l'opération NANOOK n'avait pas fait l'objet d'une vérification en vol et ne pouvait donc pas être utilisé; par conséquent, l'établissement de la MTCA a été retardé à plusieurs reprises. En raison de ce retard, l'espace aérien sous le FL270 est demeuré non contrôlé, et il n'a pas été possible ou nécessaire de fournir d'espacement IFR de quelque sorte que ce soit à l'intérieur de l'espace aérien prévu pour la MTCA.
Le MANOPS ATC de NAV CANADA permet la prestation de services d'espacement IFR aux aéronefs qui se trouvent dans un espace aérien non couvert par le radarFootnote 98. Cela peut se faire par exemple en gardant les aéronefs qui arrivent par la suite à l'extérieur de la zone ou à une altitude plus élevée jusqu'à l'atterrissage de l'aéronef en approche. Pendant que la zone de contrôle de classe D était en vigueur, il n'y avait pas de procédure en place permettant d'aider les contrôleurs à appliquer des normes d'espacement IFR non radar dans la zone de contrôle de classe D, même si de tels services étaient requis. On n'a pas établi de normes d'espacement IFR entre les avions effectuant les vols FAB6560 et KBA909 à l'entrée dans la zone de contrôle.
Les contrôleurs tour et terminal avaient accès aux renseignements météorologiques à jour pour CYRB à partir de terminaux réservés pour surveiller le site Web de la météorologie à l'aviation de NAV CANADA. Aucun service automatique d'information de région terminale (ATIS) n'était établi dans l'unité ATC de CYRB.
Le MANOPS ATC de NAV CANADA indique que les contrôleurs terminal doivent fournir aux aéronefs à l'arrivée les renseignements d'atterrissage suivantsFootnote 99 :
461.2
Incluez les éléments suivants, au besoin, dans les renseignements d'atterrissage :
Vent.
Visibilité.
Plafond.
Calage altimétrique.
Remarques appropriées du bulletin météorologique en vigueur.
Approche conventionnelle ou RNAV STAR, incluant une transition.
Piste en service.
Aide d'approche en service.
Conditions d'aéroport appropriées.
461.4
À l'exception du cas où il existe une évolution rapide des conditions météorologiques, il n'est pas nécessaire de donner des renseignements compris dans le message ATIS en vigueur si l'aéronef accuse réception du message.
À 16 h 29, durant la communication initiale avec le vol FAB6560, les seuls renseignements fournis par le contrôleur terminal de CYRB étaient l'élément D et les renseignements sur la circulation.
L'article 342.1 du MANOPS ATC s'applique à l'exploitation aéroportuaire et au contrôle VFR (règles de vol à vue). Il stipule que les contrôleurs tour doivent transmettre une autorisation initiale de la façon suivanteFootnote 100 :
(Indicatif de l'aéronef).
(Identification de l'unité, si nécessaire).
PISTE (numéro).
VENT (direction et vitesse).
ALTIMÈTRE (calage).
AUTORISÉ À JOINDRE LE CIRCUIT (autre point spécifique).
identification radar (si nécessaire).
(demande de comptes rendus de position, si requis).
(autres renseignements, par exemple conditions de circulation, exploitation simultanée de pistes qui se croisent, état de l'aéroport).
Le contrôleur tour de CYRB a fourni les renseignements requis, sauf ceux de l'élément F, qui n'étaient pas pertinents en raison des conditions météorologiques de vol aux instruments qui prévalaient, et ceux de l'élément G, qui n'étaient pas pertinents parce que le radar n'était pas opérationnel.
1.17.6.5 Espace aérien temporaire pour l'opération NANOOK
La planification initiale pour l'opération NANOOK par les forces armées, TC et NAV CANADA s'articulait autour des dimensions de l'espace aérien et du type d'espace aérien requis par les forces armées, ainsi que des moyens d'alerter le milieu de l'aviation au sujet de l'opération. L'espace aérien a été établi par TC au moyen de modifications apportées au Manuel des espaces aériens désignés pour répondre aux besoins des forces armées. On a opté pour un espace aérien de classe D afin que l'organisme de contrôle soit en mesure de fournir un service de contrôle positif aux exploitants pendant la durée de l'opération NANOOK.
Une zone de contrôle est établie afin de s'assurer que les aéronefs en IFR peuvent demeurer à l'intérieur d'un espace aérien contrôlé durant les approches et pour faciliter le contrôle de la circulation en VFR et en IFR. Les prolongements de région de contrôle sont établis autour des aérodromes où l'espace aérien contrôlé est insuffisant pour assurer l'espacement requis entre les arrivées et les départs en régime IFR, et pour que les aéronefs en IFR demeurent dans un espace aérien contrôlé. Une région de contrôle terminal (TCA) est similaire à un prolongement de région de contrôle, sauf que la TCA peut s'étendre à la verticale jusqu'à l'intérieur de l'espace aérien supérieurFootnote 101.
Les vols IFR doivent obtenir une autorisation de l'ATC avant d'entrer dans un espace aérien contrôlé. L'espace aérien de classe D est un espace aérien contrôlé à l'intérieur duquel sont autorisés les vols IFR et VFR. L'ATC assure l'espacement des vols IFR seulement. Les aéronefs reçoivent les renseignements sur la circulation.
Le milieu de l'aviation a été alerté par l'entremise de NOTAM publiés par NAV CANADA le 2 août 2011. Le NOTAMN 111404 établissait une région de contrôle terminal militaire, ou MTCA, de classe D dans un rayon de 80 nm de CYRB, de 700 pieds agl au FL200, en vigueur du 6 au 28 août 2011 (annexe W). Le NOTAMN 111405 établissait une zone de contrôle (CZ) de classe D dans un rayon de 10 nm de CYRB de la surface à 6000 pieds asl, en vigueur du 6 au 28 août 2011.
1.17.6.6 Installations radar temporaires
Le radar procure un moyen positif de déterminer le trafic aérien et d'assurer l'espacement. On avait prévu des installations radar temporaires à CYRB pour l'espace aérien de classe D de l'opération militaire. Ce plan comprenait à la fois le radar de surveillance de zone (ASR) et le PAR.
La livraison de l'équipement de contrôle de la circulation aérienne a été retardée, et la mise en œuvre de la CZ et de la MTCA a été reportée en conséquence. Les retards ont été promulgués par le NOTAMR 111424 et le NOTAMR 111425, publiés le 4 août 2011, qui remplaçaient les NOTAM précédents et reportaient les dates d'entrée en vigueur de la MTCA et de la CZ au 10 août 2011. Les NOTAM sont présentés à l'annexe W.
Après l'arrivée et l'installation de l'équipement, le NOTAMN 110102 a été publié le 12 août, établissant la zone de contrôle de classe D, en vigueur du 10 août 2011 au 28 août 2011 (annexe W)Footnote 102.
De mauvaises conditions météorologiques ont empêché la vérification en vol du radar de CYRB, ce qui a retardé la mise en œuvre de la MTCA. Une série de NOTAM, énumérés ci-après, a été publiée les jours suivants pour reporter l'établissement de la MTCA :
un NOTAM publié le 12 août reportait l'établissement de la MTCA au 14 août;
un NOTAM publié le 14 août reportait l'établissement de la MTCA au 15 août;
un NOTAM publié le 15 août reportait l'établissement de la MTCA au 16 août;
un NOTAM publié le 17 août reportait l'établissement de la MTCA au 19 août;
un NOTAM publié le 19 août reportait l'établissement de la MTCA au 21 août.
Tous les reports avaient été effectués selon la présomption que le radar militaire aurait fait l'objet d'une vérification en vol avant la nouvelle date; cependant, rien ne garantissait qu'une vérification en vol aurait lieu avant la nouvelle date et la nouvelle heure. Parce que ni l'ASR ni le PAR n'avaient fait l'objet d'une vérification en vol, ils ne pouvaient pas être utilisés pour assurer des services de contrôleFootnote 103.
Les postes de travail des contrôleurs tour et terminal à CYRB se trouvaient dans des remorques (photo 5). Les 2 postes de travail étaient dotés d'équipement de communication et de nombreux moniteurs affichant de l'information. L'un des moniteurs dans la tour affichait l'information radar. Le poste de travail du contrôle terminal était équipé de nombreux écrans pour l'ASR et le PAR.
Photo 5. Installation de services de circulation aérienne (ATS) militaire temporaire à Resolute Bay (CYRB). La remorque abritant le terminal est située derrière les tentes.
Même si le radar n'avait pas fait l'objet d'une vérification en vol, il était opérationnel. Les données radar étaient enregistrées et transmises aux 2 remorques. Le contrôleur terminal était au poste de travail de contrôle pour surveiller les arrivées et accorder des autorisations de départ aux vols. Les données radar étaient affichées, mais n'étaient pas utilisées aux fins de contrôle.
À environ 10 nm de CYRB, le vol FAB6560 a effectué un virage pour se placer en approche finale; le contrôleur terminal a parlé brièvement avec le contrôleur tour, et on l'a avisé que l'affichage radar de la tour ne fonctionnait pas. Le technicien dans la remorque abritant le terminal n'était pas disponible. La MTCA n'était pas en vigueur, et le contrôleur terminal n'assurait pas de services de contrôle. Le contrôleur terminal avait eu des problèmes plus tôt dans la journée avec l'affichage radar terminal, qu'il avait rectifiés tout simplement en réinitialisant l'affichage. Le contrôleur terminal a offert de l'aide en réinitialisant l'affichage radar de la tour et a quitté la remorque abritant le terminal pour se rendre à celle de la tour. Le contrôleur terminal n'a pas été capable de réinitialiser l'affichage radar de la tour et est retourné à la remorque abritant le terminal.
À son retour à la remorque abritant le terminal, le contrôleur terminal a jeté un bref coup d'œil aux affichages radar, mais ne leur a pas prêté beaucoup d'attention, parce que le radar ne pouvait pas servir aux fins de contrôle.
Le contrôleur tour n'avait pas d'affichage radar fonctionnel pour maintenir une bonne connaissance de la situation, et les conditions météorologiques empêchaient de faire l'acquisition visuelle de la circulation aérienne.
1.17.6.7 Procédures d'approche aux instruments : région de contrôle terminal militaire en vigueur
Si le radar de surveillance militaire avait été opérationnel et si la MTCA avait été en vigueur, les aéronefs pénétrant dans l'espace aérien auraient communiqué avec le contrôleur terminal de CYRB sur la fréquence désignée et auraient reçu des instructions pour la descente et l'approche vers CYRB. On aurait utilisé le radar pour identifier les aéronefs et maintenir l'espacement. L'équipage d'un aéronef aurait fait part de ses intentions relatives à l'approche et à l'atterrissage au contrôleur terminal et aurait reçu des instructions relatives au cap et aux altitudes à maintenir ou à suivre, de même qu'aux écarts de route observables par le contrôleur terminal.
À mesure que l'aéronef se serait approché de l'aéroport, le contrôleur terminal aurait donné une autorisation d'effectuer une approche aux instruments. L'aéronef serait resté sur la fréquence terminale sous contrôle terminal jusqu'en courte finale de la piste. En courte finale, l'aéronef aurait été transféré à la fréquence de la tour pour obtenir une autorisation d'atterrissage. L'équipage aurait alors continué l'approche aux instruments à l'aide de l'équipement de navigation de l'aéronef jusqu'à l'acquisition de références visuelles nécessaires à l'atterrissage.
1.17.6.8 Procédures d'approche aux instruments : région de contrôle terminal militaire non opérationnelle
Parce que la MTCA n'était pas opérationnelle, les aéronefs IFR en rapprochement de CYRB de l'espace aérien supérieur non contrôlé (sous le FL270) devaient établir la communication avec la tour de contrôle militaire avant de pénétrer dans la zone. Les aéronefs devaient donner leur heure d'arrivée prévue (ETA), indiquer leurs intentions relatives à l'approche et rester sur la fréquence de la tour pour recevoir les renseignements sur la circulation ainsi que l'autorisation de pénétrer dans la zone. Lors de la transmission de l'ETA, le pilote devait préciser le point, le repère ou l'installation de référence de l'ETA. L'équipage devait ensuite effectuer une approche aux instruments et, après la réception de l'autorisation d'atterrir de la tour, atterrir ou amorcer une approche interrompue s'il ne se trouvait pas dans une position pour atterrir.
Une fois à l'intérieur de la zone de contrôle de classe D, les normes d'espacement IFR s'appliquaient. Pour prévenir les conflits de trafic, les aéronefs IFR devaient recevoir des services de contrôle IFR (c.-à-d., espacement et autorisations d'approche) d'un contrôleur possédant les certifications IFR, peu importe la disponibilité du radar.
1.17.7 Gestion des ressources en équipe
1.17.7.1 Objectif de la gestion des ressources en équipe
Dans un avion à équipage multiple comme le B737, les pilotes doivent être capables de bien interagir les uns avec les autres, leur avion et leur environnement, en utilisant les listes de vérifications et les SOP connexes de l'entreprise pour assurer une gestion efficace des menaces, des erreurs ou des situations indésirables qui peuvent survenir. Par conséquent, toute enquête mettant en cause un poste de pilotage à équipage multiple doit examiner les facteurs de gestion des ressources en équipe (CRM) afin de déterminer les défaillances qui peuvent s'être produites. Les rubriques qui suivent examinent la réglementation actuelle telle qu'elle s'applique à la CRM, à l'accréditation des instructeurs de CRM et à la formation en CRM à First Air.
La CRM vise à réduire l'erreur humaine en aviation. Selon la définition couramment acceptée, la CRM désigne l'utilisation de toutes les ressources humaines et matérielles, ainsi que des sources d'information mises à la disposition de l'équipage de conduite pour assurer la sécurité et l'efficacité des opérations aériennes.
Pour atteindre cet objectif, on forme les équipages de conduite à utiliser diverses stratégies pour aider à améliorer l'efficacité. Contrairement aux compétences en matière de pilotage, la formation en CRM met l'accent sur des habiletés cognitives et interpersonnelles importantes. La formation initiale en CRM que reçoivent les équipages de conduite établit le fondement pour ces compétences essentielles en CRM. Après l'établissement d'un fondement de compétences essentielles en CRM, des séances de formation périodique aident à renforcer ces compétences essentielles et à fournir aux équipages de conduite des occasions de développer les compétences qu'on leur a enseignées dans le cadre de la formation initiale en CRM. Des études ont montré que les pilotes qui ont récemment suivi une formation en CRM sont mieux préparés à gérer de nouvelles situations que les équipages de conduite qui n'ont pas récemment suivi une telle formationFootnote 104.
1.17.7.2 Évolution de la réglementation en matière de formation en gestion des ressources en équipe
En 1995, le BST a formulé la recommandation A95-11Footnote 105 à l'intention de TC, demandant que la formation en CRM et en prise de décisions soit rendue obligatoire pour tous les exploitants et équipages œuvrant dans l'aviation commerciale. Cependant, dans sa réponse à la recommandation A95-11, TC a indiqué qu'il adopterait seulement des règlements exigeant la formation en CRM pour les exploitants qui relèvent de la sous-partie 705 du RAC. Par conséquent, le BST a jugé que la réponse de TC dénotait une attention en partie satisfaisanteFootnote 106.
Le 10 octobre 1996, TC a imposé des exigences de formation en CRM aux exploitations d‘entreprises de transport aérien qui relèvent de la sous-partie 705 du RAC. Les exigences sont entrées en vigueur dans la Norme de service aérien commercial (NSAC) 725.124(39) : Formation en gestion des ressources du poste de pilotage. En 2004, le titre a été modifié à « NSAC 725.124(39) : Formation en gestion des ressources du poste de pilotage (CRM) pour les membres d'équipage » afin d'en élargir la portée au-delà des pilotes. Hormis cette modification, cette norme est demeurée inchangée depuis sa création, en 1996.
Le texte qui suit est tiré directement de la NSAC 725.124(39)Footnote 107 :
L'exploitant aérien doit offrir une formation en gestion des ressources du poste de pilotage qui porte sur les éléments suivants :
La formation initiale est obligatoire pour tous les membres d'équipage et doit traiter de tous les points des alinéas a) et b) :
(i) attitudes et comportements;
(ii) aptitude à communiquer;
(iii) résolution de problèmes;
(iv) facteurs humains;
(v) résolution de conflits;
(vi) prise de décisions;
(vii) constitution et entretien d'une équipe;
(viii) gestion de la charge de travail.
La formation annuelle porte sur les procédures de sécurité et d'urgence. Elle doit comprendre, le cas échéant, la participation conjointe des pilotes et des agents de bord et traiter des points suivants :
(i) relations entre les membres d'équipage;
(ii) étude des accidents ou incidents d'exploitants aériens;
(iii) présentation de procédures d'urgence coordonnées choisies et discussion (mise en pratique de l'aptitude à gérer les ressources du poste de pilotage); et
(iv) exercices d'évacuation des membres d'équipage suivis d'un compte rendu.
La circulaire d'information aux transporteurs aériens no 0117 de TC (datée du 15 avril 1997)Footnote 108, précise l'interprétation de la NSAC 725.124(39).
Bien que les sujets obligatoires soient indiqués dans la NSAC 725.124(39), il n'existe aucune norme définissant le contenu requis ou la durée minimale des cours, ou aucune exigence visant à faire approuver par TC le matériel de formation utilisé. Afin de démontrer le respect de la NSAC 725.124(39), les exploitants régis par la sous-partie 705 du RAC doivent tout simplement soumettre leurs plans de formation initiale et périodique en CRM au bureau régional de TC aux fins d'approbation.
Normalement, le plan de formation en CRM est soumis sous forme de partie intégrante du manuel d'exploitation de la compagnie (COM) ou d'un autre manuel l'entreprise. Lorsque TC reçoit le plan de formation en CRM, il compare le contenu proposé pour la séance de formation en CRM à la liste des éléments requis aux termes de la NSAC 725.124(39). Une fois le plan approuvé, les séances de formation en CRM font l'objet de très peu de surveillance de la part de TC, et rien n'oblige TC à assister aux cours en CRM d'une entreprise dans le cadre du processus d'approbation.
De plus, l'alinéa NSAC 725.124(39)b) offre peu d'indications aux exploitants sur les exigences minimales de formation périodique en CRM, et ne mentionne aucun des principaux sujets désignés à l'alinéa a) de la NSAC 725.124(39). Rien n'oblige à revoir les sujets traités dans le cadre de la formation initiale en CRM. Par conséquent, les exploitants disposent de beaucoup de latitude quant à la matière enseignée dans le cadre des séances de formation périodique en CRM, à la façon dont cette matière est enseignée et au temps alloué à la formation.
Avant 2003, TC participait activement aux activités de formation en CRM aux différentes organisations et aux équipages de conduite partout au pays. Cette formation était donnée dans le but d'aider les exploitants à satisfaire aux exigences de la NSAC 725.124(39). Pour aider à la prestation de la formation, TC a élaboré un cours initial en CRM de 2 jours (TP 13689 - Gestion des ressources de l'équipage) dans le milieu des années 1990 et l'a mis en vente. La trousse de formation est constituée de 9 présentations différentes, totalisant 187 diapositives. Le cours en CRM de TC avait pour principal but de sensibiliser les participants aux concepts de la CRM, plutôt que de leur fournir des outils pratiques (c.-à-d., des modèles ou des stratégies) de prise de décisions et de communication qui seraient facilement transposables dans un environnement multipilote régi par des procédures. Selon le guide de l'instructeur en CRM de TC, les présentations dans la trousse de formation satisfont aux exigences de la NSAC 725.124(39). Cependant, il n'y a pas de cadre obligatoire qui établit l'ordre dans lequel doit être présenté le matériel de formation en CRM de TC. Les présentations de TC sur la CRM peuvent avoir lieu dans n'importe quel ordre, selon ce que préfère la personne responsable de la formationFootnote 109. Selon la publication TP 13689, il y a beaucoup de sujets à aborder en 2 jours de formation.
Le cours en CRM de TC a souvent servi de modèle pour la formation initiale en CRM. Cependant, la matière dans le guide porte seulement sur les éléments de la liste de la NSAC 725.124(39)a). Elle ne donne aucune indication quant aux exigences précisées dans la NSAC 725.124(39)b), et elle passe sous silence un grand nombre des difficultés particulières avec lesquelles un pilote peut devoir composer dans le cadre d'une opération spécifique.
Le 1er avril 2003, TC a mis fin à la prestation de ces ateliers, annonçant dans le numéro 1/2003 de Sécurité aérienne - Nouvelles que TC réorientait ses « ressources sur les activités les plus avantageuses du point de vue de la sécurité ». Le bulletin poursuit en expliquant que le Programme de la Sécurité du système réorientait « les énergies et les ressources afin de traiter de nouvelles priorités ainsi que de l'évolution de certaines questions et orientations, telles que les systèmes de gestion de la sécurité et les initiatives visant à réduire les incursions sur piste »Footnote 110.
En janvier 2007, un appareil A100 de King Air s'est écrasé à Sandy Bay (Saskatchewan). L'enquête a révélé plusieurs problèmes de sécurité liés à la CRM. Le Bureau a publié le rapport d'enquête A07C0001 le 14 octobre 2009, et dans la recommandation A09-02, il recommande queFootnote 111 :
[l]e ministère des Transports oblige les exploitants aériens commerciaux à dispenser une formation contemporaine en gestion des ressources de l'équipage (CRM) aux pilotes d'un taxi aérien relevant de la sous-partie 703 du Règlement de l'aviation canadien (RAC) et aux pilotes d'un service aérien de navette relevant de la sous-partie 704 du RAC.
Le rapport d'enquête aéronautique A09A0016 du BST souligne les risques liés au règlement et à la norme en matière de CRM en vigueur au Canada. À la suite de l'enquête, le BST a publié un fait établi quant aux risques lié au règlement et aux normes en matière de CRM en vigueur pour les exploitants d'une entreprise de transport aérien régis par la sous-partie 705 du RAC, précisant que « les équipages de conduite formés selon ces normes risquent de ne pas connaître les dernières techniques de gestion des menaces et des erreurs ».
Les mesures subséquentes de TC comprenaient la formation d'un groupe de discussion constitué de représentants de TC et de l'industrie, qui s'est réuni en janvier 2012. Dans le cadre de son mandat, le groupe de discussion devait déterminer la durée acceptable d'une formation en CRM. On a également demandé au groupe de déterminer les qualifications requises des instructeurs pour donner la formation en CRM et la meilleure façon de mettre en œuvre un programme d'accréditation.
Le rapport final du groupe de discussion sur la formation en CRM, daté du 29 février 2012, proposait des éléments d'une norme de formation contemporaine en matière de CRM. Le groupe de discussion a présenté des recommandations au Comité de réglementation de l'Aviation civile (CRAC)Footnote 112, notamment l'adoption du modèle de gestion des menaces et des erreurs (TEM) approuvé par l'OACI et la mise en œuvre d'une formation fondée sur des scénarios. Cependant, le rapport du groupe de discussion indique que TC ne devrait pas exiger de qualifications particulières pour les instructeurs de CRM et, de plus, TC ne devrait pas entreprendre un programme d'accréditation des instructeurs de CRM. De plus, le groupe de discussion a recommandé de ne pas fixer de durées obligatoires pour les cours de CRM.
Le CRAC a accepté les recommandations du groupe de discussion de TC et, le 24 avril 2012, a demandé l'élaboration d'un règlement et d'une norme de formation contemporaine en matière de CRM pour les sous-parties 702, 703, 704 et 705 du RAC. La norme doit inclure le modèle de TEM afin de permettre aux équipages de conduite d'être mieux préparés à communiquer efficacement, à évaluer les conditions et à prendre les décisions appropriées lorsqu'ils se trouvent en situation critique. TC a affecté un chef d'équipe à la tâche d'élaborer un plan de projet. Ce projet n'a toujours pas été réalisé.
Des appels semblables en vue d'élargir la formation en CRM ont été lancés aux États-Unis. En 2009, le National Transportation Safety Board (NTSB) a souligné que la nécessité d'améliorer la formation en CRM était l'une de ses plus importantes préoccupations liées à la sécurité aérienneFootnote 113. Le 1er mai 2009, la FAA a répondu en publiant un avis de projet de réglementation qui exigerait que les exploitants relevant de la Partie 135Footnote 114 dispensent une formation en CRM à tous les membres d'équipage, pilotes et agents de bord inclusFootnote 115.
Même si, au Canada, la réglementation concernant la CRM n'a pas été mise à jour pour tenir compte des notions modernes de CRM, d'autres programmes dirigés par TC intègrent déjà certaines de ces notions. Par exemple, le Programme avancé de qualificationFootnote 116, le programme de pilote vérificateur agrééFootnote 117 et la licence de pilote en équipage multipleFootnote 118 attachent une importance considérable aux concepts et aux stratégies de gestion des menaces et des erreurs. En outre, chacun de ces programmes souligne aussi l'importance d'être en mesure d'évaluer ces compétences dans le cadre d'un programme de formation axé sur les compétences.
1.17.7.3 Phases de la formation en gestion des ressources en équipe reconnues par l'industrie
Il existe une variété de normes et de règlements en matière de CRM partout dans le monde. Malgré ces différences, dans le milieu de l'aviation, on s'entend pour dire que les programmes de CRM doivent comprendre 3 phases de formation distinctesFootnote 119.
La première phase est la formation de familiarisation et de sensibilisation. Dans le cadre de cette phase, les candidats se familiarisent avec les concepts et les stratégies de base en matière de CRM. Des études ont révélé que la formation de familiarisation à la CRM peut entraîner une amélioration marquée de l'attitude en ce qui concerne la coordination de l'équipage et la gestion du poste de pilotageFootnote 120.
La deuxième phase est la pratique, la rétroaction et la formation périodique. Dans les premières années de la CRM, les compétences étaient enseignées séparément des connaissances et des compétences d'ordre technique. Au cours des dernières années, on reconnaissait davantage que la formation en CRM serait plus efficace si elle était intégrée à la formation technique dès le début du programme de formation des équipages de conduiteFootnote 121. Il a été constaté que les programmes de formation en CRM qui comprennent la formation périodique et la mise en pratique de stratégies de CRM entraînent des changements importants dans le rendement des équipages de conduite durant les séances d'entraînement en route et en cours de volFootnote 122.
La troisième phase est le renforcement continu. Cette phase signifie que l'on doit faire de la CRM plus qu'un simple aspect de la formation des équipages de conduite; elle débute par l'adoption des concepts de CRM au niveau de la direction. Une façon efficace d'assurer le renforcement continu est d'intégrer des compétences et des comportements essentiels de CRM aux SOP de l'entreprise pour que la CRM fasse partie intégrante de l'ensemble de la formation et des opérationsFootnote 123.
1.17.7.4 Avancées récentes dans le domaine de la gestion des ressources en équipe
Les générations antérieures de formation en CRM étaient très modulaires et n'étaient pas intégrées en un thème global ou un cadre obligatoire. Par conséquent, les anciens programmes de CRM étaient habituellement constitués de présentations sur des sujets liés à la CRM axées davantage sur la sensibilisation, et ne fournissaient pas aux équipages de conduite des stratégies concrètes de CRM qu'ils pourraient employer en cours de formation et pendant les opérations. On a continuellement amélioré la formation en CRM de façon à en optimiser l'efficacité et la pertinence. Le rapport d'enquête aéronautique A09A0016 du BST explique l'évolution de la CRM et ses différentes générations.
Les avancées les plus récentes en CRM sont fondées sur la TEM. La TEM recommande d'analyser avec circonspection les dangers potentiels et de prendre les mesures qui s'imposent pour éviter, piéger ou atténuer les menaces et les erreurs avant qu'elles n'aboutissent à un état indésirable de l'aéronef. Autrement dit, la TEM fait de l'anticipation, de la reconnaissance et de la correction ses principes clésFootnote 124. En utilisant les données de sécurité réelles d'un exploitant, les programmes de formation actuels en CRM peuvent cibler les aspects précis d'une opération qui posent les plus grands risques. La TEM souligne aussi l'importance de la gestion des états indésirables de l'aéronef, car elle constitue la dernière chance dont disposent les équipages pour prévenir des conséquences négativesFootnote 125.
L'élément qui est peut-être le plus important de la formation actuelle en CRM est la possibilité de transposer la CRM directement dans les aéronefs. On enseigne aux équipages de conduite des compétences et des stratégies particulières qui peuvent être utilisées et évaluées en cours de formation et pendant les opérations. Cet aspect facilite la tâche de fournir et de recevoir de la rétroaction au sujet de la CRM d'un équipage de conduite durant un vol.
Il n'existe aucune exigence réglementaire au Canada relativement à l'enseignement de la plus récente génération de formation en CRM. À l'heure actuelle, les seules exigences sont celles établies dans la NSAC 725.124(39).
1.17.8 Pratiques exemplaires en matière de gestion des ressources en équipe
1.17.8.1 Généralités
Il y a de nombreuses pratiques exemplaires en matière de CRM, et celles-ci sont abordées dans le rapport d'enquête aéronautique A09A0016 du BST. La présente rubrique porte sur l'application de certaines de ces pratiques exemplaires aux SOP et aux listes de vérifications, à la résolution de problèmes et à la prise de décisions, à la communication entre les membres de l'équipage et à la gestion de la charge de travail.
1.17.8.2 Conscience de la situation
La conscience de la situation désigne l'extraction continue des renseignements de l'environnement, leur intégration aux connaissances existantes afin de former un modèle mental cohérent, et l'utilisation de cette image mentale pour diriger la perception et anticiper les évènements futursFootnote 126.
Les actions d'un équipage de conduite doivent reposer sur une même compréhension de l'état actuel de l'aéronef, du plan de vol prévu et des menaces à ces activités pour que cet équipage soit en mesure de travailler de façon coordonnée, efficace et sécuritaire. Cette compréhension commune à tous les membres de l'équipage est appelée la conscience commune de la situation ou la conscience d'équipe de la situationFootnote 127,Footnote 128.
La conscience individuelle de la situation s'entend de la façon dont un membre de l'équipage interprète et extrapole les changements ponctuels dans l'état de l'aéronef et prend des mesures appropriées. Il y a conscience commune de la situation lorsque la conscience individuelle de la situation des 2 pilotes se chevauche lorsqu'ils accomplissent les mêmes tâches. Lorsque cette compréhension est cohérente, les équipages peuvent prévoir et coordonner de façon efficace leurs actions dans le but d'atteindre leur objectif commun.
Un certain nombre de comportements discrets et continus permet d'établir et de maintenir la conscience commune de la situation d'un équipage.
Les comportements discrets comprennent la planification de vol, les exposés en vol et la détermination de points clés durant le vol, comme l'atteinte d'altitudes minimales. Ces activités sont des points de contrôle prévus pour décrire la situation actuelle et les plans futurs, de même que pour offrir une occasion d'établir et de vérifier que tous les membres de l'équipage ont la même compréhension.
Les comportements continus comprennent la gestion des menaces et des erreurs, les annonces de changements d'état de l'aéronef ainsi que du réglage et du mode des instruments, et la communication des modifications apportées aux plans. Ces comportements assurent la communication de l'information et des changements d'état entre les membres de l'équipage afin de mettre à jour de façon continue la conscience commune de la situation. Tous ces comportements sont des aspects de la CRM qui permettent aux membres d'un équipage d'interagir de façon efficace. De tels comportements continus dépendent de la formation et de l'approche opérationnelle adoptée par les exploitants.
En plus des comportements décrits plus haut, il existe 2 autres aspects clés du maintien de la conscience commune de la situation :
l'observation des réactions et de l'humeur des autres membres de l'équipage afin de détecter tout signe de confusion, d'inconfort ou de désengagement, qui peut indiquer que la conscience commune de la situation se détériore;
la prise des mesures correctives nécessaires pour raviver l'engagement de l'autre membre de l'équipage et mettre fin à sa confusion ou à son inconfort.
1.17.8.3 Résolution de problèmes et prise de décisions
Les SOP constituent pour les pilotes une source d'information importante qui les aide à résoudre des problèmes et à prendre des décisions. Les SOP sont conçues pour aider les pilotes à travailler à l'intérieur de limites de gestion des risques opérationnels et à maintenir la conscience de la situation au moyen de procédures préétablies et d'une phraséologie normalisée.
La résolution de problèmes par les équipages de conduite peut être décrite comme un processus à étapes multiples dont la prise de décisions fait partie intégrante. L'équipage doit d'abord reconnaître l'existence d'un problème, recueillir de l'information sur celui-ci, puis utiliser cette information pour définir le problème. Les membres de l'équipage doivent ensuite proposer des solutions envisageables, décider laquelle est la meilleure et mettre en œuvre cette solution. Enfin, ils doivent évaluer les résultats de la solution utilisée pour déterminer si on a réglé le problème. Si le problème n'a pas été réglé, l'équipage peut devoir répéter le processusFootnote 129. L'explication suivante a été fournie dans un rapport d'enquête aéronautique antérieur du BST :
Une prise de décision efficace suppose que l'on cerne avec précision la situation dans laquelle on se trouve, que l'on évalue les implications de cette situation, que l'on élabore un ou des plans d'action, ainsi que des solutions de rechange, et que l'on mette en œuvre une ligne de conduite optimale. Il est tout aussi important que l'équipage de conduite soit capable d'identifier les changements éventuels dans la situation, et de renouveler le processus de prise de décision pour s'assurer que les changements en question ont été pris en compte et que les plans sont modifiés en conséquence. Le fait de ne pas tenir compte adéquatement des implications possibles d'une situation augmente les risques qu'une décision entraîne des conséquences défavorables aboutissant à un état d'aéronef indésirable.Footnote 130
Des niveaux supérieurs de stress peuvent avoir une incidence négative sur la capacité du pilote à percevoir et à évaluer des indices dans l'environnement et peuvent entraîner un rétrécissement attentionnelFootnote 131. Bien souvent, ce rétrécissement attentionnel peut se traduire par un préjugé de confirmation : un phénomène poussant le pilote à trouver des indices qui confirment le plan d'action choisi au point d'exclure, éventuellement, des indices critiques qui appuient une autre hypothèse moins désirableFootnote 132. Ainsi, des conséquences potentiellement graves pourraient ne pas bénéficier de toute l'attention nécessaire au moment de définir un plan d'action optimale. Il est donc impératif que les pilotes réévaluent continuellement leur situation afin de déterminer s'ils l'ont correctement perçue et si le plan donne les résultats escomptés ou s'il faut le modifier.
Un autre aspect important du processus de la prise de décisions est le concept de modèles mentaux partagésFootnote 133. Le modèle mental d'une personne dépend en grande partie de sa compréhension des circonstances d'une situation, de ses attentes concernant l'avenir et de son expérience passée. L'expérience ou les connaissances d'une personne jouent un rôle important dans son processus décisionnel.
Dans le cas d'un équipage, tous les membres doivent s'efforcer de faire coïncider leur modèle mental. Si l'équipage ne parvient pas à atteindre cet objectif en raison des différences de personnalité ou du style de communication, il se peut qu'il néglige des renseignements importants au moment où il faudra étudier les conséquences possibles d'une situation de même qu'élaborer des plans et des solutions de rechange. En ce qui concerne la CRM, une communication efficace joue un rôle majeur dans la mise en conformité des modèles mentaux de l'équipage. Par contre, il est impératif que les pilotes s'entraînent et se perfectionnent pour que leurs aptitudes à communiquer soient efficaces, plus spécialement lorsque la charge de travail est lourde, comme pendant une approche aux instruments ou une situation anormale.
1.17.8.4 Communications entre les membres d'équipage
Pour faire concorder des modèles mentaux, améliorer la conscience de la situation de l'équipage et optimiser le processus de prise de décisions, les membres d'équipage doivent posséder d'excellentes aptitudes à la communication. Il peut s'avérer difficile de satisfaire à cette condition dans un poste de pilotage lorsque les pilotes sont soumis à des contraintes de temps, à des situations anormales et à des priorités concurrentes. Afin que les pilotes puissent communiquer efficacement dans des situations de lourde charge de travail, les SOP fournissent une phraséologie normalisée, qui leur permet de communiquer et de comprendre rapidement.
Les programmes modernes de formation en CRM mettent en lumière les obstacles à une communication efficace. Ces programmes proposent plusieurs stratégies de communication qui aident les personnes à choisir la stratégie la plus appropriée en fonction de la gravité de la situation, du temps disponible et des autres personnes engagées dans le processus de communication.
Les membres d'équipage ne doivent éprouver aucune gêne à formuler des avis au commandant de bord pour faciliter la prise de décisions de ce dernier. De nos jours, la formation en CRM encourage les P/O à s'affirmer. Cependant, cela peut se révéler très difficile pour certains, et un manque d'assertivité a été un facteur dans d'autres accidentsFootnote 134. Les communications inefficaces résultent souvent d'un manque d'assertivité. La formation moderne en CRM traite spécifiquement de ces questions.
On encourage généralement les membres d'équipage à s'affirmer lorsqu'ils ne sont pas certains de quelque chose ou lorsqu'ils ont des raisons de douter du bien-fondé du plan d'action suivi. Idéalement, il faut commencer par formuler un commentaire ou une question neutre. Si cette approche ne suffit à pas à régler le problème, il faut entreprendre une démarche plus affirmative. Dans Drift into Failure, S. Dekker explique ce qui suit [en anglais seulement]Footnote 135 :
… the collaborative operation of machinery in time critical situations assumes the use of unmitigated language―language that doesn't hedge, qualify, weaken or soften, but that delivers unvarnished and unambiguous messages. People generally have a really hard time doing that, because they are not the machine they are operating. They are people, with feelings and social expectations about relationships. Only constant training and indoctrination, as well as positive reinforcement, can help build confidence and acceptance for the use of unmitigated language.
Les stratégies de communication progressive peuvent être difficiles à adopter. Si on demande aux P/O de s'affirmer, on doit les former adéquatement sur les stratégies de communication progressive et leur donner la possibilité de mettre en pratique la théorie reçue.
1.17.8.5 Assertivité progressive des premiers officiers
Un de ces outils de communication de CRM est le modèle PACE (probing, alerting, challenging et emergency warning)Footnote 136. Le modèle PACE fournit aux pilotes, plus particulièrement aux P/O, de nombreuses stratégies de communication visant à développer une assertivité progressive naturelle, selon les circonstances qui prévalent à ce moment. L'assertivité peut être progressive ou immédiate selon le niveau de gravité de la menace.
Le modèle PACE commence par des questions exploratoires précises lorsque la sécurité n'est pas compromise et qu'il y a assez de temps pour poser des questions. Cette étape vise à aider l'équipage à mieux comprendre la situation et à faire coïncider les modèles mentaux d'une façon non menaçante.
La prochaine étape du processus consiste à avertir l'autre pilote de la préoccupation. À ce stade, la personne exprime sa préoccupation particulière de façon à s'assurer que l'autre comprend bien ce qui la préoccupe. Cette étape peut être effectuée après avoir posé des questions exploratoires ou immédiatement, si le pilote qui exprime sa préoccupation est d'avis que le plan d'action suivi n'est pas adéquat. Il est essentiel d'utiliser un langage direct sans équivoque pour s'assurer que l'avertissement est bien compris.
La troisième étape du processus de progression est une déclaration de contestation. La déclaration de contestation fournit sans équivoque à l'autre personne une description claire des conséquences liées à la poursuite d'un plan d'action particulier et propose un autre plan d'action à adopter.
La dernière étape est une intervention d'urgence, le PNF prenant les commandes de l'aéronef dans des situations dangereuses ou lorsque le temps est d'importance critique. Le tableau 11 présente un exemple de l'application du modèle PACE jusqu'au point où le PNF prend les commandes.
Tableau 11. Exemple de l'application du modèle PACE qui progresse jusqu'à une prise des commandes
P - probing
« Commandant, sommes-nous sous l'alignement de descente? »
A - alerting
« Commandant, je constate que nous sommes 1 point sous l'alignement de descente. »
C - challenging
« Commandant, nous continuons de descendre sous l'alignement de descente. Nous risquons de nous écraser. Nous devons remettre les gaz. »
E - emergency
« Commandant, j'ai les commandes. Remise des gaz, puissance maximale, volets à la position 10. »
Même si le modèle PACE fournit de nombreuses stratégies de communication allant de neutres à très impératives, rien n'oblige à commencer au début du modèle si la situation dicte une autre mesure. S'il y a lieu, on peut passer directement des questions exploratoires à l'urgence, ou dans certaines situations critiques, directement à la déclaration d'urgence. Le principe sous-jacent de ce modèle est de s'assurer que toutes les parties comprennent la situation et que tout le monde est sur la même longueur d'onde en ce qui concerne le plan d'action proposé.
En fait, le modèle permet à l'organisation de donner au P/O la responsabilité non seulement de prendre la situation en main, mais aussi de prendre les commandes de l'aéronef à la place du commandant si cela s'avère nécessaire. Autre fait important : le modèle confère au P/O le pouvoir de le faire.
Idéalement, le modèle doit être encadré par la philosophie de l'entreprise, faire l'objet d'une politique de l'organisation et être mis en œuvre au moyen de procédures adaptées aux besoins de l'exploitant. Des séances de formation pratique sont nécessaires pour renforcer les concepts philosophiques, procéduraux et liés aux politiques, de même que la phraséologie, en les appliquant à des scénarios opérationnels réalistes.
Des enquêtes menées par le BST et d'autres organismes internationaux ont consigné des incidents et des accidents où le P/O aurait pu prendre les commandes du commandant de bord.
Le 23 juillet 2011, un hélicoptère Sikorsky S-92A a décollé d'un navire de haute mer. Les commandes de pilotage du commandant de bord ont entraîné une assiette en tangage de 23° en cabré avec décélération. Le commandant, frappé d'incapacité subtile, possiblement en raison d'une désorientation spatiale, n'a pas appliqué les commandes appropriées pour sortir de l'assiette anormale. Cette inaction a contribué à une perte excessive d'altitude durant la descente inopinée. Contrairement à ce que prévoit la règle des deux appels des SOP de l'exploitant, le premier officier n'a pas pris les commandes de l'hélicoptère lorsque les mesures appropriées n'ont pas été prises pour sortir de la descente inopinée. La descente s'est arrêtée à 38 pieds au-dessus de la surface de l'eau. L'hélicoptère n'a pas été endommagé et il n'y a eu aucun blesséFootnote 137.
Le 22 mai 2010, un B737-800 est sorti en bout de piste durant l'atterrissage à Mangalore (Inde). L'avion a été détruit; il y a eu 158 décès et 8 survivants. Le premier officier avait déterminé que l'approche était instable et a demandé au commandant de remettre les gaz à 3 reprises, mais le commandant a poursuivi l'approche jusqu'à l'atterrissage. Le premier officier n'a pas pris les commandes de l'avion malgré la situation qui s'aggravait. L'enquête a mentionné l'ambiguïté dans différentes instructions habilitant le premier officier à amorcer une remise des gaz comme facteur ayant contribué à l'accidentFootnote 138.
Le 7 mars 2007, un avion B737-400 est sorti en bout de piste durant l'atterrissage à Yogyakarta (Indonésie). L'avion a été détruit; il y a eu 21 décès et 119 survivants. Le commandant était le pilote aux commandes, et il a continué une approche instable jusqu'à l'atterrissage, malgré le fait que les procédures de l'entreprise exigeaient une remise des gaz. Contrairement aux instructions de l'entreprise, le premier officier n'a pas pris les commandes de l'avion à la place du commandant lorsque celui-ci a ignoré, à plusieurs reprises, des avertissements qu'il fallait amorcer une remise des gazFootnote 139.
1.17.8.6 Gestion de la charge de travail
La charge de travail dépend du nombre de tâches à accomplir dans une certaine période de temps. Si le nombre de tâches à accomplir augmente, ou si le temps disponible diminue, la charge de travail augmente. Par conséquent, pour réduire la charge de travail, il faut soit diminuer le nombre de tâches à accomplir, soit augmenter le temps disponible pour les accomplir. La saturation des tâches est une condition où le nombre de tâches à accomplir dans une période de temps donnée excède les capacités des pilotes à les accomplir, et certaines tâches sont alors omises ou reportées.
Au sein de l'industrie, la norme pour les aéronefs à équipage multiple consiste à désigner un membre de l'équipage comme PF et l'autre pilote comme PNF ou pilote surveillant (PM). Cette répartition des tâches aide à optimiser l'efficacité de l'équipage, à prévenir la saturation des tâches et à assurer que les erreurs sont repérées avant qu'elles n'entraînent un état indésirable de l'aéronef ou une conséquence négative.
Le PF est responsable de la maîtrise de l'aéronef, et le PNF ou PM est responsable des autres tâches de l'équipage liées aux communications radio, à la gestion des listes de vérifications, à la surveillance des actions du PF et à la surveillance de la progression du vol. Au cours des dernières décennies, on est passé de la désignation de PNF à celle de PM, et ce, dans le but de souligner la nécessité de surveiller l'état de l'aéronef et les actions du PFFootnote 140.
Le partage approprié des responsabilités dans un poste de pilotage permet de libérer la capacité mentale critique, de sorte que les membres de l'équipage puissent mieux prendre en compte les indices extérieurs, facilitant ainsi la tâche de détection des écarts par rapport au plan d'action prévu. Si un équipage de conduite commence à prendre du retard, il peut rapidement se trouver plus pressé par le temps. La charge de travail peut alors atteindre un niveau critique. Lorsque cela se produit, la capacité mentale supplémentaire requise pour rattraper le retard peut empêcher la prise en compte d'indices extérieurs.
Par exemple, si un équipage de conduite est pressé en approche finale, il peut avoir plus de difficulté à détecter et à corriger les écarts par rapport à la trajectoire de vol. Si un équipage de conduite se trouve en situation de charge de travail excessive, il doit prendre des mesures pour la réduire, plus particulièrement pendant une phase critique du vol, comme l'approche et l'atterrissage. Une des techniques dont disposent les équipages de conduite qui se trouvent presque saturés par les tâches ou dans une position dangereuse en approche finale consiste à remettre les gaz. Du point de vue de la gestion de la charge de travail, une remise des gaz procure à l'équipage de conduite plus de temps pour se rattraper, et ainsi ramener la charge de travail à un niveau acceptable avant d'amorcer une autre approche. Une autre façon de gérer la charge de travail consiste à augmenter le temps disponible en modifiant le profil d'approche (c.-à-d., réduire la vitesse, effectuer un virage de 360° et intercepter l'approche finale à une plus grande distance de la piste).
Le volume 1 de l'AOM, à la page 03.15.1, renvoie les utilisateurs au FOM de l'entreprise pour obtenir une description complète des tâches et des responsabilités des membres de l'équipage de conduite. Les sections 1.5.7 et 1.5.8 du FOM décrivent les tâches et les responsabilités du commandant et du P/O, respectivement. Les membres des équipages de First Air sont désignés PF et PNF. Les tâches et les responsabilités du PF et du PNF sont décrites en détail dans le volume 1 de l'AOM.
1.17.9 Formation en gestion des ressources en équipe à First Air
1.17.9.1 Généralités
Conformément à la réglementation, First Air dispense une formation initiale et périodique en CRM à tous les équipages de conduite. Le cours initial de CRM de First Air est donné dans le cadre de la formation au sol des nouveaux employés, tandis que la formation périodique en CRM est dispensée aux différentes bases de First Air.
Les exigences de formation en CRM de First Air sont décrites dans le First Air Flight Operations Training Manual (FOTM), qui a été approuvé par TC. Ces exigences sont semblables à celles décrites dans la NSAC 725.124(39), à l'exception du fait que First Air inclut aussi la formation conjointe des membres d'équipage en gestion des menaces à la sécurité à bord.
Le FOTM précise que la formation en CRM de First Air vise l'objectif suivant [en anglais seulement] : « … ensure that safe, efficient and proactive thinking, communications and actions among crew members are understood and practised »Footnote 141. Même si des inspecteurs de TC ont assisté à des cours de formation au sol de First Air par le passé, il n'existe aucun dossier indiquant que des inspecteurs de TC ont déjà assisté à un cours de formation initiale en CRM de First Air donné dans le cadre de cette formation au sol. Par conséquent, il n'existe aucun dossier indiquant que TC a vérifié si le programme de formation en CRM de First Air satisfaisait à la NSAC pertinente.
Un examen du dossier de formation du commandant de bord a révélé que ce dernier avait reçu sa formation initiale en CRM le 14 février 1997. Le commandant avait complété sa dernière formation périodique en CRM à First Air le 19 novembre 2010, et la date d'expiration de celle-ci était le 1er décembre 2011.
Un examen du dossier de formation du P/O a révélé que ce dernier avait reçu sa formation initiale en CRM le 28 septembre 2007 dans le cadre de sa formation initiale au sol à First Air. Le même jour, le P/O avait aussi complété une séance d'introduction au SGS, une formation en matière de sécurité commune et une formation sur les exigences de sécurité pour voyager aux États-Unis. Le P/O avait complété sa dernière formation périodique en CRM à First Air le 9 mars 2011, et la date d'expiration de celle-ci était le 1er avril 2012.
1.17.9.2 Cours initial de gestion des ressources en équipe de First Air
Dans le cadre de l'enquête, des enquêteurs du BST ont examiné le cours initial de CRM de First Air et y ont assisté en tant qu'observateurs. Le cours a été donné à un groupe de 4 pilotes nouvellement engagés qui participaient à la formation au sol ATR-42. La formation devait durer 1 journée, et les sujets suivants y étaient notamment abordés : gestion des ressources de l'équipage, écarts de conduite envers les membres d'équipage et sécurité commune.
Le cours initial de CRM a duré 4,5 heures. Le cours était constitué de présentations sur des sujets particuliers liés à la CRM, de vidéos, de 2 études de cas, de 2 pauses de 15 minutes et d'une pause-repas de 50 minutes. La première étude de cas portait sur un événement mettant en cause l'entreprise et l'autre, sur un événement qui a eu lieu en 1995. De plus, 2 vidéos ont été présentées pendant le cours. La première vidéo (d'environ 18 minutes) était liée à la fatigue, et la deuxième vidéo (47 minutes) établissait le contexte de l'étude de cas finale. Consulter le tableau 12 pour obtenir une comparaison des exigences réglementaires de la NSAC 725.124(39) et du cours initial de CRM de First Air auquel ont assisté les enquêteurs du BST.
L'enquête a déterminé que la matière présentée dans le cadre du cours initial de CRM de First Air, à l'exception des 2 études de cas, provient de la trousse de formation TP13689 – Gestion des ressources de l'équipage de TC. First Air a acheté le matériel de formation en CRM de TC au début des années 2000 et l'utilise depuis ce temps pour le cours initial de CRM.
Cependant, First Air ne consacre pas 2 jours à la formation initiale en CRM, contrairement à ce que prévoyait TC. Afin de satisfaire à d'autres exigences de formation, le cours initial de CRM de First Air a été réduit à une partie de 1 journée. Cette pratique est en place depuis plusieurs années, et correspond au dossier de formation du P/O en cause, qui indique qu'il avait reçu une formation portant sur 3 autres sujets le même jour que son cours initial de CRM. Pour respecter le temps attribué à la formation initiale en CRM pendant le cours destiné aux nouveaux employés, 5 des sujets exigés par la NSAC 725.124(39) ne sont pas abordés dans le cadre du cours initial de CRM de First Air (tableau 12).
Tableau 12. Comparaison des exigences de formation initiale en CRM de la NSAC 725.124(39) et du cours initial de CRM de First Air
Exigence réglementaire [NSAC 725.124(39)a)]
Cours initial de CRM de First Air (3 avril 2012)
Attitudes et comportements
Matière non présentée
Aptitude à communiquer
Communication
Résolution de problèmes
Matière non présentée
Facteurs humains
Facteurs humains – Fatigue et stress
Résolution de conflits
Matière non présentée
Prise de décisions
Matière non présentée
Constitution et entretien d'une équipe
Leadership et esprit d'équipe
Conscience de la situation (absence d'exigence réglementaire à cet égard)
Gestion de la charge de travail
Matière non présentée
Même si le matériel de formation en CRM de TC n'est plus à jour, plusieurs compétences fondamentales en CRM y sont abordées, mais n'ont pas été présentées pendant le cours initial de CRM de First Air. Plus particulièrement, la présentation sur les attitudes et comportements traite du comportement assertif et propose un format que les pilotes peuvent utiliser pour créer une déclaration assertive. Ce module comprend aussi 1 diapositive qui donne une brève description du modèle PACE. Le module de TC sur la résolution de problèmes et la prise de décisions comprend un modèle de prise de décisions et traite des contraintes de temps et de leur incidence sur la charge de travail. La présentation de TC sur la résolution de conflits indique que la conformité aux SOP est une façon de prévenir les conflits et préconise le recours aux SOP pour résoudre les divergences dans le poste de pilotage. La présentation sur la gestion de la charge de travail traite de l'incidence de la charge de travail sur la capacité d'un équipage de conduite de prêter attention aux indices extérieurs. De plus, cette présentation fait valoir que le fait de ne pas partager l'information ou de ne pas répondre aux demandes de renseignements et les écarts par rapport aux procédures établies sont des signes avant-coureurs que quelqu'un est sur le point d'atteindre un niveau de saturation des tâches.
Le cours initial de CRM de First Air est donné par 1 de 2 instructeurs de formation au sol. Un d'eux agit à titre d'instructeur principal en CRM; l'autre donne la formation initiale en CRM seulement lorsque l'instructeur principal n'est pas disponible. Les 2 instructeurs de formation au sol à First Air ont une longue expérience d'enseignement de cours techniques aux équipages de conduite et au personnel de maintenance. Ni l'un ni l'autre des instructeurs de CRM n'a reçu de formation officielle d'animateur ou d'instructeur en CRM, ni n'a été accrédité pour donner la formation en CRM, ce qui n'était pas exigé par la réglementation en vigueur. Les 2 instructeurs ont démontré qu'ils croyaient fermement en la valeur de la formation en CRM comme moyen d'améliorer l'exploitation à First Air.
Pendant le cours initial de CRM auquel ont assisté les enquêteurs du BST, la participation était très faible. L'instructeur a fait plusieurs tentatives d'animation de faible niveauFootnote 142 pour susciter différentes discussions, souvent en posant des questions fermées. Malgré ses efforts, l'instructeur a eu de la difficulté à engager les participants dans le cours, et il a souvent relancé la discussion pour éviter de prendre du retard dans le cours.
1.17.9.3 Formation périodique en gestion des ressources en équipe de First Air
Comme il est mentionné précédemment dans le rapport, les exigences réglementaires en matière de formation périodique en CRM ne désignent pas de sujets précis liés à la CRM qui doivent être enseignés, et rien n'exige qu'on procède à la révision des sujets abordés dans le cadre de la formation initiale en CRM.
La formation périodique conjointe en CRM pour B737 de First Air est décrite à la page 25.30.6 de son FOTM (modification no 37, daté du 1er avril 2006). Le temps de formation accordé à la CRM est de 2,25 heures et de 1,75 heure pour les exercices d'évacuation. Les sujets décrits sont semblables aux éléments figurant dans la NSAC 725.124(39)b).
La formation périodique en CRM à First Air est habituellement donnée dans les différentes bases de l'entreprise. Dans la mesure du possible, le cours est donné par l'instructeur principal en CRM. Cependant, d'autres pilotes instructeurs peuvent donner les séances de formation périodique en CRM dans les bases éloignées si l'instructeur principal n'est pas disponible.
Le BST a aussi assisté à une séance de formation périodique en CRM de First Air à la base principale d'exploitation de l'entreprise à Ottawa. Cette séance a été donnée par l'instructeur principal en CRM de l'entreprise, et elle faisait partie d'une journée complète de formation périodique conjointe sur l'évacuation de la cabine, la lutte contre les incendies, la CRM, les écarts de conduite envers les membres d'équipage et la sécurité commune. Cinq pilotes d'ATR-42 et 3 agents de bord ont participé à la formation.
La formation en CRM a duré 2 heures 7 minutes, incluant une pause de 15 minutes. Parmi les sujets abordés, notons le leadership, l'esprit d'équipe, les attitudes, la communication, la prise de décisions, la culture de groupe, les SOP et une étude de cas d'un événement mettant en cause un ATR-42 de First Air. Le temps accordé à chaque sujet variait de 5 à 15 minutes. Les SOP étaient décrites comme moyen de désigner les rôles, de cerner les erreurs et de guider le rendement d'un groupe. Elles peuvent également être employées comme source de phraséologie normalisée afin d'éliminer la mauvaise communication et de réduire les malentendus.
Contrairement au contenu du cours initial de CRM, qui date du milieu des années 1990, une partie de la matière abordée dans le cadre du cours périodique de CRM comportait des éléments tirés des plus récentes générations de la formation en CRM, dont les concepts de gestion des menaces et des erreurs.
1.17.10 Animation de séances de formation en gestion des ressources en équipe
Il est généralement reconnu que l'efficacité de la formation en CRM dépend grandement de la qualité de la prestation, et qu'un haut niveau d'animation est un des éléments clés du succès de la formation en CRMFootnote 143. L'animation est différente de l'« enseignement » traditionnel du fait qu'elle est une technique destinée à aider les personnes en formation à découvrir par elles-mêmes ce qui est approprié et efficace, en fonction de leur propre expérience et des circonstancesFootnote 144.
L'animation est souvent qualifiée selon 3 niveaux : faible, moyen et élevé. Lorsqu'on parle d'un degré élevé d'animation, l'instructeur ne fait que guider les participants tout au long du processus d'apprentissage. En ce sens, il pose des questions ouvertes, encourage la discussion et évite de répondre à ses propres questions ou de passer trop rapidement à autre chose. Aux degrés plus faibles d'animation, l'instructeur a recours à des questions précises pour essayer d'engager les participants. L'animation de niveau faible se caractérise par des questions fermées, qui n'encouragent pas naturellement la discussion ou l'expression d'opinions.
Il peut être nécessaire d'avoir périodiquement recours à une animation de niveau faible pendant un cours de CRM afin de soutenir le rythme. Cependant, il faut tout faire pour revenir à un degré d'animation le plus élevé possible à la première occasion afin que les étudiants puissent continuer d'apprendre par leur propre analyse et leur propre discussion. Les compétences en animation ne sont pas faciles à maîtriser, et comme de nombreuses autres compétences, elles ont besoin de pratique et de rétroaction.
1.17.11 Accréditation des instructeurs de gestion des ressources en équipe
Au Canada, les instructeurs de CRM ne sont pas tenus de suivre un processus d'accréditation, mais sont assujettis à la NSAC 725.124(4), qui établit les normes générales relatives au personnel de formation. L'enquête A09A0016 du BST a révélé qu'en l'absence d'un processus d'accréditation des instructeurs de CRM, les équipages de conduite risquent de ne pas connaître les dernières techniques de CRM.
Afin d'assurer une qualité d'instruction et d'évaluation en CRM, la Civil Aviation Authority (CAA) du Royaume-Uni a mis au point une série de conditions d'accréditation rigoureuses pour les instructeurs de CRM (CRMI) et les examinateurs d'instructeurs de CRM (CRMIE)Footnote 145. Le processus d'accréditation comprend des exigences minimales en matière d'expérience, la réussite d'un cours de CRMI approuvé et une évaluation pratique des connaissances et des compétences des candidats relatives à l'instruction ou à l'évaluation de la CRM avant qu'on leur permette d'occuper ces fonctions. Dans le cadre du processus d'accréditation, les CRMI et les CRMIE qualifiés doivent renouveler leur qualification tous les 3 ans pour continuer d'assumer ces rôles. Ce renouvellement est nécessaire afin de s'assurer que les CRMI et les CRMIE continuent de se conformer à la norme requise au fur et à mesure que la formation en CRM évolue.
Au Canada, il n'existe aucune exigence en matière d'expérience, de formation ou de qualifications pour enseigner la CRM. Le groupe de discussion sur la CRM, qui a présenté des recommandations au CRAC en 2012 (rubrique 1.17.7.2), s'est penché sur la question des qualifications et de l'accréditation des instructeurs de CRM. Le groupe en est venu à la conclusion qu'il serait extrêmement complexe de définir et de mettre en œuvre des qualifications et des critères d'accréditation pour les instructeurs de CRM au Canada, parce que chaque secteur de l'industrie comporte ses propres exigences et dangers. On a déterminé que l'élaboration et la mise en œuvre d'un processus d'accréditation efficace et acceptable pour les exploitants et les équipages de conduite relevant des sous-parties 702, 703, 704 et 705 du RAC dépassaient les attributions de TC. Le CRAC a accepté la recommandation du groupe de discussion de ne pas aller de l'avant avec l'accréditation des instructeurs de CRM.
1.18 Renseignements supplémentaires
1.18.1 Biais comportementaux
Dans leur article intitulé « Pressing the Approach », Berman et Dismukes soulignent que les humains sont sujets à des partis pris qui peuvent influencer le jugement et la prise de décisions des équipages de conduiteFootnote 146. L'article traite des effets de la tendance à s'en tenir à un plan établi et de la tendance à l'anticipation.
La tendance à s'en tenir au plan est décrite comme une tendance profondément enracinée des gens à poursuivre leur plan d'action initial même quand un changement de situation justifie l'adoption d'un nouveau plan. Selon l'analyse effectuée par les auteurs, cette tendance découlerait de l'interaction de 3 éléments importants, soit l'influence exercée par la société ou l'organisation, les caractéristiques et les limites inhérentes à l'intellectualisation chez l'être humain et les renseignements incomplets ou ambigus.
La tendance à l'anticipation est décrite par les auteurs comme suitFootnote 147 :
[traduction]…une personne qui s'attend à ce qu'une situation se produise remarquerait moins les détails indiquant que la situation n'est pas ce qu'elle semble être… Cette tendance s'aggraverait lorsque les équipages doivent assimiler de nouveaux renseignements qui leur sont fournis de façon sporadique et par fragments incomplets et parfois ambigus.
1.18.2 Dispositifs d'avertissement d'impact
1.18.2.1 Dispositif avertisseur de proximité du sol
Un dispositif avertisseur de proximité du sol (GPWS) avertit l'équipage de conduite lorsque l'aéronef est à une distance dangereuse du sol. On a introduit le GPWS au cours des années 1970 pour réduire le grand nombre d'accidents ou de quasi-accidents d'impacts sans perte de contrôle (CFIT).
Les premiers GPWS utilisaient la hauteur au-dessus du sol (mesurée par radioaltimètre) et la vitesse de rapprochement pour déterminer si l'aéronef était dans une situation potentiellement dangereuse. Les améliorations apportées par la suite incorporaient la configuration de l'aéronef (p. ex., la position du train d'atterrissage) et l'écart par rapport à l'alignement de descente du système d'atterrissage aux instruments (ILS). En raison du fait que le radioaltimètre ne peut pas prendre un compte le relief devant l'aéronef, ces GPWS des premières générations étaient incapables de prédire un changement soudain de relief (par exemple, l'approche d'un relief ascendant abrupt).
Le paragraphe 605.37(1) du Règlement de l'aviation canadien (RAC) exige que tous les avions à turboréacteurs dont la masse est supérieure à 15 000 kg (33 069 livres) et pour lesquels un certificat de type délivré autorise le transport de 10 passagers ou plus soient munis d'un GPWS.
Conformément à l'exigence réglementaire, C-GNWN était muni d'un GPWS, comme il est décrit à la rubrique 1.6.3.
1.18.2.2 Introduction du système d'avertissement de proximité du sol amélioré
En 1991, Honeywell a lancé son système d'avertissement de proximité du sol amélioré (EGPWS), mis au point pour surmonter la contrainte susmentionnée. Ce dispositif combine des données sur la position exacte (normalement déterminée par GPS) avec une carte tridimensionnelle précise du relief, pour voir devant et sous l'aéronef. Cette configuration génère des avertissements au pilote si certains paramètres sont enfreints. Les systèmes avertisseurs de proximité du sol de cette génération fournissent un avertissement sonore aussi bien que visuel par rapport au relief devant l'aéronef. Une carte montrant le relief qui approche change de vert à jaune à rouge à mesure que l'aéronef approche des obstacles (figure 11).
Figure 11. Exemple de changement de l'affichage du système d'avertissement de proximité du sol amélioré (EGPWS) à l'approche d'un obstacle
Non seulement la carte présente-t-elle à l'équipage de l'information concernant l'altitude du sol le long de la trajectoire de vol, mais elle lui fournit aussi une meilleure conscience de la situation quant à la position de l'aéronef par rapport aux obstacles et à la trajectoire de vol prévue. Des améliorations apportées aux sources d'information utilisées pour calculer et prédire la proximité du sol ont donné lieu à une signalisation plus rapide des dangers, et donc à une augmentation du temps disponible pour que l'équipage puisse réagir. Plusieurs paramètres différents peuvent déclencher un avertissement.
Par la suite, d'autres fabricants ont produit des systèmes semblables, qui sont collectivement appelés systèmes d'avertissement et d'alarme d'impact (TAWS).
Le TAWSFootnote 148 incorpore les éléments suivants :
GPWS (rubrique 1.6.3);
évitement d'obstacle à balayage frontal;
algorithme de descente prématurée;
descente à 500 pieds au-dessus du sol ou de l'élévation de la piste la plus proche au cours d'un appel de demande d'intervention vocal en vue d'une approche de non-précision;
système de visualisation du sol.
1.18.2.3 Recommandation du Bureau de la sécurité des transports sur les dispositifs avertisseurs de proximité du sol
À la suite de l'accident de type CFIT, le 10 novembre 1993, mettant en cause un avion Hawker Siddeley HS748 au nord–ouest de Sandy Lake (Ontario)Footnote 149, le BST a émis la recommandation A95-10. La plupart des aéronefs à turbopropulseur, certains transportant des dizaines de passagers, continuent de voler sans la protection supplémentaire qu'offre un GPWS. Par conséquent, le Bureau a recommandé dans A95-10 queFootnote 150 :
le ministère des Transports exige que tous les aéronefs de ligne et de transport régional propulsés par turbine à gaz et approuvés pour le vol IFR, et pouvant transporter au moins 10 passagers, soient équipés d'un GPWS.
Depuis l'émission de la recommandation A95-10 du BST, des mesures successives prises par Transports Canada (TC) ont donné lieu à des modifications réglementaires, qui sont entrées en vigueur le 4 juillet 2012, lorsqu'elles ont été publiées dans la Gazette du Canada, Partie II, volume 146, no 14Footnote 151 :
Ces modifications réglementaires rendent obligatoire l'installation d'un système d'avertissement et d'alarme d'impact (TAWS) équipé d'une fonction de précision d'altitude améliorée (EAA) à bord des avions à turbomoteur privés dont la configuration prévoit six sièges ou plus, excluant les sièges des pilotes et des avions commerciaux dont la configuration prévoit six sièges ou plus, excluant les sièges des pilotes. Les exploitants disposeront d'un délai de deux ans après la date d'entrée en vigueur du Règlement pour équiper leurs avions d'un TAWS et de cinq ans pour les doter de l'EAA.
Le BST a déterminé que la modification réglementaire proposée par TC dépasse les critères de cette recommandation, et qu'elle corrigera dans une grande mesure la lacune de sécurité relevée par la recommandation A95-10. Le 5 septembre 2012, le BST a estimé qu'on avait accordé à cette recommandation une « attention entièrement satisfaisante ».
1.18.3 Liste de surveillance du Bureau de la sécurité des transports
Le présent rapport porte sur un accident CFIT, un des éléments de la Liste de surveillance du BST. La Liste de surveillance dresse le bilan des problèmes de sécurité dans les transports qui présentent les plus grands risques pour les Canadiens et les Canadiennes. Dans chaque cas, les mesures prises jusqu'à maintenant sont insuffisantes; l'industrie et l'organisme de réglementation doivent prendre des mesures concrètes afin d'éliminer ces risques.
Le BST a enquêté sur de nombreuses collisions avec le sol et l'eau et a cerné des lacunes, dressé des faits établis et formulé des recommandations pour réduire encore plus la fréquence des accidents CFIT. Les collisions avec le sol et l'eau représentent 5 % des accidents, mais sont la cause de près de 25 % de toutes les pertes de vie. De 2000 à 2009, 129 accidents de ce type sont survenus au Canada et ont fait 128 morts. Depuis que le BST a inscrit ce problème à sa Liste de surveillance, le nombre d'accidents de ce type n'a pas diminué. En 2010, il en est survenu 13, et 14 en 2011.
1.18.4. Systèmes de gestion de la sécurité
Mis en œuvre correctement, les systèmes de gestion de la sécurité (SGS) permettent aux sociétés aériennes de déterminer les dangers et de gérer les risques, ainsi que d'élaborer des processus de sécurité efficaces et d'y adhérer. Les grands transporteurs commerciaux canadiens sont tenus d'avoir un SGS depuis 2005.
La transition vers les SGS n'a pas été aisée. Des enquêtes récentes menées par le BST ont fait état de difficultés avec lesquelles les exploitants ont été aux prises dans leur transition de la gestion traditionnelle de la sécurité aux SGSFootnote 152.
2.0 Analyse
2.1 Introduction
Les dossiers indiquent que les 2 pilotes possédaient les licences et les qualifications nécessaires pour effectuer le vol, conformément à la réglementation en vigueur. L'enquête a révélé que rien n'indiquait que la fatigue ou des facteurs physiologiques auraient compromis le rendement du commandant de bord ou du premier officier (P/O).
Durant ce vol, l'alignement de piste n'a pas été capté, et le vol a continué sur un cap qui s'écartait progressivement vers la droite du faisceau d'alignement de piste. L'avion a continué de s'écarter du faisceau vers la droite, mais le commandant de bord a poursuivi l'approche, et ce, malgré les indications des instruments que la trajectoire du vol s'écartait de façon importante de l'axe d'alignement de piste et un certain nombre de tentatives du P/O de signaler le danger. En outre, l'approche était non stabilisée selon plusieurs paramètres, et le vol s'est poursuivi au-delà du point où les pilotes auraient dû faire une remise des gaz, conformément aux politiques de l'entreprise. Un avertissement du dispositif avertisseur de proximité du sol (GPWS) a incité l'équipage à amorcer une remise des gaz, mais cette mesure a été prise trop tard pour éviter l'impact avec le relief.
La présente analyse porte essentiellement sur ce qui suit :
la raison pour laquelle l'avion n'a pas capté l'alignement de piste et l'alignement de descente;
l'effet des erreurs de compas;
l'équipement de navigation de l'avion;
la raison pour laquelle le commandant croyait que l'avion avait capté l'alignement de piste;
la raison pour laquelle l'équipage n'a pas été en mesure de concilier les divergences dans leur conscience de la situation;
la raison pour laquelle le commandant a continué l'approche;
les adaptations apportées aux SOP.
2.2 Planification de l'approche du vol FAB6560
Après le départ de Yellowknife (CYZF) du vol 6560 (FAB6560) de First Air, le plafond et la visibilité à Resolute Bay (CYRB) ont diminué pour atteindre aussi peu que 200 pieds et ½ mille terrestre (sm), tandis que l'observation météorologique de 16 h indiquait une visibilité de 10 milles sous un ciel couvert, avec un plafond de 700 pieds. Le vent soufflait du sud, favorisant la piste 17T (degrés vrais). Les conditions météorologiques à CYRB au moment de l'arrivée du vol FAB6560 faisaient en sorte qu'il était impossible d'effectuer une approche visuelle, et qu'une approche aux instruments était requise.
Une approche de la piste 17T aurait nécessité plus de temps et de carburant, et aurait obligé l'équipage à effectuer une approche de non-précision plutôt qu'une approche avec le système d'atterrissage aux instruments (ILS). Le vent arrière était à l'intérieur des limites de l'avion, et une approche ILS de la piste 35T (degrés vrais) permettrait de gagner du temps et d'économiser du carburant en effectuant une approche directe. De plus, l'ILS permet une approche de précision, qui comporte moins de risque et une charge de travail moins lourde qu'une approche de non-précision. L'approche directe ILS de la piste 35T offrait de nombreux avantages, le seul facteur négatif étant le vent arrière à l'intérieur des limites.
Avant d'amorcer la descente, le commandant de bord a avisé le P/O qu'il prévoyait utiliser la navigation de surface (RNAV)Footnote 153 pour se rendre jusqu'au radiophare d'alignement de piste et ensuite passer du système de positionnement mondial (GPS) à la VHF NAV (navigation à très haute fréquence). L'enquête a déterminé que l'on pouvait interpréter ce plan de transition de la navigation en route à l'approche de 2 façons différentes.
D'une part, le commandant peut avoir eu l'intention d'utiliser le GPS d'une façon non standardisée pour aligner l'avion sur l'alignement de piste en approche finale, et ensuite passer à la VHF NAV. D'autre part, le commandant peut avoir eu l'intention d'utiliser le GPS pour se rendre à un point juste avant le point de cheminement MUSAT, où il passerait à la VHF NAV.
Même si l'exposé d'approche du commandant fournissait des renseignements sur les vitesses d'approche et certaines altitudes minimales, il n'abordait aucunement la configuration voulue des aides à la navigation durant l'approche ou des altitudes sécuritaires minimales durant la phase d'arrivée. L'exposé d'approche du commandant était non standard et incomplet.
Lorsque l'exposé d'approche est abrégé, l'équipage risque d'être mal préparé pour l'approche. De plus, une des principales raisons d'être des exposés est de faire en sorte que les 2 pilotes partagent les mêmes attentes et les mêmes éléments de base pour l'établissement d'une conscience commune de la situation.
2.3 Amorce et gestion de la descente
À environ 150 milles de CYRB, avant d'amorcer la descente, le P/O a fait remarquer au commandant que leur vitesse sol était élevée. Cette vitesse élevée était due à la composante vent arrière à l'altitude de croisière.
Le commandant a indiqué qu'il allait amorcer la descente à 105 milles marins (nm) de CYRB. Cette communication indique que le commandant était conscient de l'effet du vent arrière et qu'il en avait tenu compte dans son plan de descente (100 nm par vent nul au début de la descente, plus une correction pour le vent). Cependant, la correction de 5 nm apportée par le commandant était en deçà des 17 nm réellement requis pour compenser l'effet du vent arrière de 63 nœuds.
À 16 h 22 min 16 s, le P/O a demandé l'autorisation de descente. L'avion était alors à environ 112 nm du point de toucher des roues à CYRB. L'autorisation de descente a été transmise à 16 h 23 min 29 s, et l'avion se trouvait alors à environ 103 nm du point de toucher des roues. La descente a commencé à 16 h 23 min 40 s, à une distance de 101 nm du point de toucher des roues, plus près de CYRB que ce que le commandant avait prévu, et 16 nm de moins que la distance requise en raison du vent.
Jusqu'à l'amorce de la descente, le sélecteur de mode de tangage du pilote automatique était vraisemblablement à la position ALT HOLD (maintien d'altitude) pour maintenir l'altitude de croisière. Pour amorcer la descente, le commandant aurait réglé le sélecteur de mode de tangage du pilote automatique à la position OFF. La chaîne de tangage du pilote automatique aurait alors fonctionné en mode CWS (pilotage transparent) de tangage manuel avec une faible force de surpassement (5 livres). Dans ce mode, le pilote automatique maintient l'assiette en tangage réglée par le pilote au moyen du manche.
En raison de l'amorce tardive de la descente, l'avion était haut par rapport au profil de descente. La hauteur excessive aurait pu être corrigée de plusieurs façons :
en augmentant le taux de descente et la vitesse;
en effectuant un virage de 360°;
en réglant le point d'interception du faisceau d'alignement de piste de MUSAT à un point plus éloigné de la piste;
en déployant les aérofreins.
Le commandant a maintenu la trajectoire en direction de MUSAT et a augmenté la vitesse et le taux de descente. Par conséquent, le vol a franchi une altitude de 10 000 pieds à une vitesse indiquée de 310 nœuds (KIAS), bien au-delà de la limite de vitesse de 250 KIAS. Selon le modèle de gestion des menaces et des erreurs, la vitesse excessive constituait un état indésirable de l'avion.
Le commandant avait réduit la vitesse à 184 KIAS au moment de virer pour se placer en approche finale. Cette vitesse était conforme aux paramètres d'exploitation normale pour cette phase du vol, et n'a pas empêché l'équipage de configurer l'avion. L'avion était environ 600 pieds au-dessus du profil de descente nominal.
En raison de l'amorce tardive et de la gestion de la descente, le virage pour placer l'avion en approche finale a été effectué à une altitude plus élevée que prévu. Ces facteurs ont augmenté la charge de travail de l'équipage et ont réduit leur capacité d'évaluer et de résoudre des problèmes de navigation durant le reste de l'approche.
2.4 Fonctionnement des compas
2.4.1 Comparateur de cap
Lorsque le comparateur de cap s'allume, les pilotes en discuteront presque certainement. À l'exception du moment (16 h 25 min 7 s) où ils ont terminé la partie relative au compas des vérifications en approche, les pilotes n'ont pas parlé des compas, du cap ou du comparateur de cap pendant la partie enregistrée du vol. Par conséquent, il est presque certain que les 2 systèmes de compas fonctionnaient conformément aux paramètres précisés du comparateur de cap.
Quand les ailes de l'avion sont à l'horizontale, le comparateur de cap devrait s'allumer lorsque les caps diffèrent de 6° ±2°. La tolérance de ±2° signifie que le paramètre de différence de cap de 6° peut être aussi bas que 4° ou aussi élevé que 8°. Lorsque le comparateur de cap ne s'allume pas, il est vraisemblable que les pilotes considèrent que toute différence de cap est insignifiante, et il est possible qu'elle passe inaperçue. L'absence de toute discussion au sujet d'un écart de cap indique que, s'il y en avait eu un, il se situait à l'intérieur des paramètres du comparateur, et les pilotes considéraient qu'il était négligeable ou n'en étaient pas conscients. La différence de cap maximale entre les systèmes de compas no 1 et no 2 durant le vol FAB6560 n'a vraisemblablement pas dépassé 8° avec les ailes à l'horizontale.
2.4.2 Sélection du mode magnétique ou du mode conservateur de cap des commandes compas
Un examen physique des commandes compas n'a pas été concluant.
Les enquêteurs se sont demandé si les commandes compas étaient réglées au mode magnétique (MAG); le fonctionnement en mode MAG aurait engendré un changement de cap important puisque la trajectoire du vol FAB6560 était à proximité du pôle magnétique nord. Les données radar indiquent qu'à 16 h 25 min 7 s, lorsque l'équipage a réasservi les compas, le vol FAB6560 suivait une trajectoire de 037 °V. Des calculs ont été faits à partir du cap enregistré du compas, des données radar et de la dérive due au vent afin de déterminer le réglage vraisemblable des commandes compas. Le cap enregistré ne concorde pas avec un réglage des commandes compas à MAG.
Les données de l'enregistreur de données de vol (FDR) n'indiquent qu'un seul réglage de compas, soit à 16 h 25 min 7 s. Environ au même moment, durant la vérification avant descente, les 2 pilotes ont répondu « DG » (c.-à-d., conservateur de cap) à l'interrogation relative au compas. Les pilotes ont vraisemblablement placé les 2 commandes compas à la position DG lorsque les compas ont été initialement changés de MAG à DG à un certain moment avant le début de l'enregistrement de données valides du FDR, à 14 h 58 min 57,5 s.
2.4.3 Sélection relative à l'hémisphère des commandes compas
En mode DG, la sélection inopinée de la position N sur le commutateur d'hémisphère d'une des commandes compas et de la position S sur l'autre ferait en sorte qu'une différence de cap considérable se présenterait assez rapidement entre les 2 compas. Une telle différence de cap entraînerait aussi le déclenchement rapide du comparateur de cap. Puisqu'il n'y a eu aucune discussion entre les pilotes au sujet du comparateur, les 2 commutateurs d'hémisphère étaient vraisemblablement réglés à la même position.
Les aéronefs de First Air sont exploités dans l'hémisphère nord; il est donc extrêmement improbable que l'on ait délibérément réglé le commutateur d'hémisphère à S. Par conséquent, il est fort probable que les 2 commutateurs d'hémisphère étaient réglés à N.
2.4.4 Compensateurs de latitude des commandes compas
Les compas devaient être réglés à DG lorsque le vol FAB6560 est entré dans l'espace aérien intérieur du Nord au point de cheminement RIBUN. Même si l'enquête n'a pas permis de déterminer à quel moment les compas ont été réglés à DG, le raisonnement qui suit repose sur l'hypothèse selon laquelle le réglage a eu lieu à RIBUN.
Le vol FAB6560 a traversé les latitudes 66 °N et 68 °N avant d'arriver à Cambridge Bay (CB). On a trouvé les compensateurs de latitude des commandes compas réglés à 68° (no 1) et 66° (no 2). Même si un examen physique n'a pas permis de déterminer la position des compensateurs de latitude au moment de l'impact, la position dans laquelle ils sont demeurés à la suite de l'impact semble raisonnable, étant donné la trajectoire du vol FAB6560 ainsi que les procédures et les pratiques d'exploitation de l'entreprise. Ces réglages ont vraisemblablement été effectués par l'équipage du vol FAB6560.
2.4.5 Précession vraie
Étant donné les taux de changement de cap enregistrés avec les ailes à l'horizontale, le comparateur de cap se serait vraisemblablement allumé s'il y avait eu une précession vraie excessive d'un DG. Cependant, les pilotes n'ont pas mentionné l'illumination du comparateur de cap ou fait de commentaires à cet égard. Il est très peu probable que l'amplitude et la direction de précession vraie des 2 DG soient simultanément les mêmes, empêchant ainsi le dépassement du seuil du comparateur. Par conséquent, on a conclu qu'il était peu probable que la précession vraie ait été la seule cause de la dérive de cap indiquée dans les données du FDR du vol FAB6560. Il est impossible d'isoler la précession vraie de la précession apparente dans les données enregistrées relatives au cap; par conséquent, l'analyse qui suit reposera sur la prémisse que la précession vraie ne dépassait pas la tolérance de ±1° par heure.
2.4.6 Précession de rotation terrestre
La commande du compas no 2 étant réglée à DG et à 66 °N de latitude, le couple aurait été appliqué au DG no 2 pour apporter une correction en fonction du taux de rotation terrestre à 66 °N. Cependant, il y aurait un certain taux de rotation terrestre résiduel (c.-à-d., la différence entre le taux de rotation terrestre à la latitude actuelle et celui à la latitude sélectionnée). On a examiné l'effet du taux de rotation terrestre au cours de 2 périodes : de 14 h 58 min 57,5 s à 15 h 48 min 25 s (du début des données valides jusqu'au virage à CB) et de 15 h 49 min 13 s à 16 h 12 (du virage à CB jusqu'au virage à 72° N, 100°45′ W).
Au cours des 2 périodes examinées, la dérive de cap enregistrée était de 25° par heure, et le taux de rotation terrestre résiduel variait entre −0,54° et 0,22° par heure. Il est fort peu probable que l'absence d'une correction de précession de rotation terrestre ait été la seule cause de la dérive de cap enregistrée.
2.4.7 Précession de transport terrestre
Le système de compas C-11B ne comporte aucun moyen d'apporter des corrections en fonction du taux de transport terrestre. On a examiné l'effet du taux de transport terrestre au cours de 2 périodes : de 14 h 58 min 57,5 s à 15 h 48 min 25 s, et de 15 h 49 min 13 s à 16 h 12.
Au cours des 2 périodes examinées, la dérive de cap enregistrée était de 25° par heure, et le taux de transport terrestre résiduel variait entre −8,51° et −9,34° par heure. Il est fort peu probable que l'absence d'une correction de précession de transport terrestre ait été la seule cause de la dérive de cap enregistrée.
2.4.8 Résumé de la précession
La somme des valeurs maximales précitées de précession vraie (1° par heure), de taux de rotation terrestre résiduel (0,54° par heure) et de taux de transport terrestre non corrigé (9,34° par heure) est de 10,88° par heure. Cependant, au cours des 2 périodes mentionnées, la dérive de cap enregistrée au compas no 2 était de 25° par heure. Par conséquent, il existe une différence importante entre la dérive enregistrée au compas no 2 et la précession totale calculée. Compte tenu de la différence de direction et d'amplitude de la dérive de cap observée et du nombre de virages effectués par l'avion, il est impossible de tirer des conclusions à l'égard de l'effet de la précession vraie et apparente sur les systèmes de compas au cours de 17 dernières minutes du vol.
2.4.9 Comportement des systèmes de compas no 1 et no 2
En raison du fait qu'il n'y a eu aucune discussion entre les pilotes sur le comparateur de cap, il a été précédemment conclu que la différence de cap maximale entre les systèmes de compas durant le vol n'a vraisemblablement pas dépassé 8° avec les ailes à l'horizontale. Ainsi, les 2 systèmes de compas concordaient, sans dépasser les tolérances du comparateur, et cette concordance aurait existé même durant la période où le cap enregistré au compas no 2 dérivait considérablement. Il est par conséquent vraisemblable que le système de compas no 1 dérivait aussi, mais en deçà du seuil de différence de cap du comparateur.
La dérive de cap enregistrée par le FDR ne correspond pas au fonctionnement normal des compas. Malgré la tenue de consultations exhaustives avec Boeing, Honeywell, Western Avionics, First Air et l'école de navigation aérienne de l'Aviation royale canadienne (ARC), l'enquête n'a pas été en mesure de déterminer pourquoi les compas se sont comportés de cette façon.
2.4.10 Erreur de compas
La présente rubrique traite de caps, de relèvements et de trajectoires par rapport au nord vrai (V), ainsi que du cap erroné enregistré et des indications des instruments auxquelles on devait s'attendre. Les valeurs qui ne sont pas désignées spécifiquement comme se rapportant au nord vrai sont plutôt des indications erronées fournies par le système de compas.
L'équipage a presque certainement utilisé la méthode GPS/radiophare non directionnel (NDB) pour régler les compas. Le radiophare non directionnel de Resolute Bay (RB NDB) était le seul radiophare utilisable à sa portée. L'entrée de l'indicatif du RB NDB dans le GPS aurait dû donner un relèvement de 029 °V pour se rendre au RB NDB à partir de la position actuelle de l'avion.
Les données radar et sur le vent indiquent que l'avion suivait une trajectoire de 037 °V en direction de MUSAT sans dérive due au vent. Après la procédure, les bonnes indications de l'indicateur radiomagnétique (RMI), en supposant l'absence d'incidence d'une erreur de NDB/ADF (radiogoniomètre automatique), auraient dû être ce qui suit : l'aiguille de relèvement de l'ADF pointant à 029 °V et, sous la ligne de foi, le cap vrai résultant de 037° (figure 12).
Cependant, une fois la procédure terminée, le cap enregistré au compas n0 2 était de 029°, ce qui indique que le cap de la ligne de foi du RMI aurait dû être lui aussi de 029°. Par conséquent, le relèvement au radiophare de RB indiqué à l'équipage au RMI du P/O aurait dû être de 021° (figure 13).
Figure 12. 16 h 25 min 7 s : Exemple d'indicateur radiomagnétique (RMI) (compas no 2) du premier officier (P/O) affichant les indications vraies prévues, sans erreur de cap
Une fois la procédure de réglage du cap terminée, le cap aurait dû être de 037 °V. Le cap enregistré était de 029°, ce qui représente une erreur de −8°. Il existe au moins 2 raisons possibles pour cette erreur : premièrement, il se peut que les pilotes aient effectué la dernière étape de la procédure incorrectement, c'est-à-dire qu'ils ont réglé le relèvement au RB NDB (029°) sous la ligne de foi plutôt que là où pointe l'aiguille de l'ADF; deuxièmement, il se peut que des inexactitudes inhérentes au système ADF/NDB aient eu une incidence sur le réglage du cap. Ces 2 scénarios sont jugés tout aussi probables l'un que l'autre.
L'erreur de réglage du cap a fait en sorte que, immédiatement après l'exécution de la procédure, l'indication de cap sur le compas no 2 était erronée : celui-ci affichait 029° au lieu de 037 °V.
Selon les calculs du triangle des vitesses pour 16 h 38, pour que l'avion suive une trajectoire de 038 °VFootnote 154, le cap devait être de 039 °V, tandis que le cap enregistré était de 024°. Cette différence signifie que l'erreur de cap avait augmenté à environ −15°.
Selon les calculs du triangle des vitesses pour 16 h 40 min 35 s, pour que l'avion suive une trajectoire de 351 °VFootnote 155, le cap devait être de 348 °V, tandis que le cap enregistré était de 331°. Cette différence signifie que l'erreur de cap avait encore augmenté, à environ −17°.
Une erreur introduite au moment du réglage initial des compas, en plus d'une dérive subséquente des compas, ont entraîné une erreur de compas de −17° durant l'approche finale. À 16 h 40 min 35 s, le cap réel calculé de l'avion était de 348 °V, tandis que le cap enregistré au compas no 2 était de 331°.
2.5 Vérifications en approche
Jusqu'à ce stade du vol, le commandant avait vraisemblablement configuré l'avion pour la navigation au GPS. Cette configuration exigeait les sélections suivantesFootnote 156 :
MD-41 du commandant de bord et du P/O − GPS;
voyant/bouton A/P SELECT − GPS sélectionné;
pilote automatique en mode MAN;
commutateur de cap sur HDG SEL;
directeurs de vol en mode HDG;
route du HSI réglée à la trajectoire GPS suivie.
À 16 h 36 min 23 s, le commandant a demandé l'exécution de la partie sous la ligne pointillée de la liste de vérifications en approche. Lorsque le P/O a demandé la position des sélecteurs NAV (navigation), les 2 pilotes ont répondu « VHF NAV ». Par conséquent, les 2 pilotes ont vraisemblablement réglé leur MD-41 à NAV à ce moment-là. Ainsi, l'affichage du HSI serait passé de GPS à NAV, et les signaux du GPS auraient été retirés du pilote automatique. À ce stade, l'équipage aurait fait les autres sélections suivantesFootnote 157 :
pilote automatique en mode VOR/LOC;
sélecteur de mode de tangage du pilote automatique toujours à OFF;
voyant/bouton A/P SELECT − GPS désélectionné;
commutateur de cap sur HDG SEL;
directeurs de vol en mode AUTO APP;
sélecteur de route du HSI tourné à 347 (trajectoire de rapprochement du radiophare d'alignement de piste).
Les pilotes de l'entreprise utilisaient rarement les modes de pilote automatique AUTO APP ou MAN G/S (alignement de descente manuel) pour les approches ILS, préférant plutôt utiliser le mode VOR/LOC pour suivre l'alignement de piste et les commandes de tangage du CWS pour suivre l'alignement de descente. Par conséquent, il est presque certain que les modes AUTO APP ou MAN G/S n'étaient pas sélectionnés à ce moment.
2.6 Modes de navigation durant le virage pour se placer en approche finale
2.6.1 Généralités
La vitesse sol au radar sur la trajectoire de rapprochement de MUSAT immédiatement avant le virage était de 229 nœuds. Même s'il est peu probable que cette vitesse ait empêché le pilote automatique de capter l'alignement de piste, elle a vraisemblablement causé le dépassement de l'axe d'alignement de piste pendant le virage en finale. L'angle d'interception du faisceau d'alignement de piste de 51° se situe dans la plage recommandée indiquée dans le manuel de vol (AOM). Par conséquent, il est peu probable que l'angle d'interception du faisceau d'alignement de piste ait empêché l'avion de le capter.
L'enquête n'a pas permis de déterminer les moyens exacts utilisés pour effectuer le virage à MUSAT. Par conséquent, 2 scénarios plausibles sont examinés aux rubriques 2.6.2 et 2.6.3.
À l'approche de MUSAT, l'équipage du vol FAB6560 est passé du GPS à la VHF NAV. À ce stade, les conditions suivantes sont communes aux 2 scénarios présentés ci-dessous :
VHF NAV no 1 − IRB ILS/DME 110,30;
VHF NAV no 2 − IRB ILS/DME 110,30;
GPS no 1 − approche RNAV 35T;
GPS no 2 − approche RNAV 35T.
Dans les 2 scénarios, après l'exécution des vérifications en approche, les conditions étaient vraisemblablement les suivantes :
commutateur de cap du pilote automatique − HDG SEL;
MD-41 du commandant de bord et du P/O − NAV;
pilote automatique sur GPS − désélectionné;
HSI du commandant et du P/O;
sélecteur de route 347°;
curseur de cap ∼024°;
directeur de vol du commandant et du P/O − AUTO APP;
voyant APD du directeur de vol du commandant et du P/O − jaune (VOR/LOC);
ADF no 1 − RB NDB 350;
ADF no 2 − RB NDB 350.
2.6.2 Sélection du mode VOR/LOC après le virage (scénario 1)
Dans ce scénario, les conditions supplémentaires suivantes étaient probables après l'exécution des vérifications en approche :
pilote automatique − mode MAN;
voyants APD du pilote automatique du commandant et du P/O − non allumés.
Compte tenu de ces conditions, la séquence d'événements suivante aurait dû se produire. À mesure que l'avion approche du radiophare d'alignement de piste, la barre de route du HSI se déplace du côté droit de l'instrument vers le centre. Le pilote doit tourner le bouton de sélection de cap du HSI pour faire tourner le curseur de cap au nouveau cap voulu (347°). Le pilote automatique fait ensuite virer l'avion en fonction du cap sélectionné. Une fois que l'avion est établi en rapprochement en approche finale, le pilote sélectionne VOR/LOC au panneau de commande de mode du pilote automatique. Le voyant VOR/LOC de pilote automatique de l'indicateur de progression d'approche (APD) devient vert dès la capture de l'alignement de piste. L'écran du directeur de vol affiche initialement une indication de virage à gauche requis, puis une indication d'ailes à l'horizontale une fois sorti du virage sur l'alignement de piste. Le voyant APD VOR/LOC du directeur de vol devient vert au moment de la capture de l'alignement de piste à environ 2,5° de l'alignement de piste, et le voyant d'alignement de descente demeure jaune.
Des essais sur simulateur ont indiqué que l'utilisation du mode VOR/LOC entraînait le suivi de l'alignement de piste ou la convergence avec cet alignement. Cependant, les données radar montrent que l'avion dérivait de façon constante de l'alignement de piste, indiquant que le mode VOR/LOC n'a pas été sélectionné après le virage. Par conséquent, cette méthode n'a pas été utilisée.
2.6.3 Sélection du mode VOR/LOC avant le virage (scénario 2)
Dans ce scénario, les conditions supplémentaires suivantes étaient probables après l'exécution des vérifications en approche :
pilote automatique – mode VOR/LOC;
voyant APD VOR/LOC du pilote automatique du commandant et du P/O − jaune.
Compte tenu de ces conditions, la séquence d'événements suivante aurait dû se produire. À mesure que l'avion approche de l'alignement de piste, la barre de route du HSI se déplace du côté droit de l'instrument vers le centre. Le sous-mode du pilote automatique passe à capture de VOR/LOC, et le virage pour intercepter le faisceau d'alignement de piste est amorcé (peu importe le réglage du curseur de cap au HSI) lorsque la barre d'écart de route indique un écart d'environ 2 points par rapport à l'axe d'alignement de piste. Les voyants APD VOR/LOC du pilote automatique deviennent verts. Le commutateur de cap retourne à HDG HOLD. En mode AUTO APP, les 2 directeurs de vol sollicitent initialement la mise à l'horizontale des ailes pour suivre le cap sélectionné au HSI. À environ 2,5° de l'alignement de piste, les directeurs de vol passent au mode capture, les barres directrices commandent un virage à gauche et les voyants APD VOR/LOC du directeur de vol deviennent verts, tandis que le voyant d'alignement de descente s'allume en jaune.
Entre 2 points et 1 point d'écart par rapport à l'axe d'alignement de piste, lorsque l'intensité du faisceau de croisement baisse sous 2 millivolts (mV) par seconde et que l'angle d'inclinaison est inférieur à 6°, le sous-mode du pilote automatique passe au mode sur l'axe VOR/LOC, et les voyants APD VOR/LOC du pilote automatique demeurent allumés en vert. Les barres directrices du directeur de vol cessent de solliciter un virage à gauche pour solliciter un retour des ailes à l'horizontale une fois sorti du virage sur l'alignement de piste. Le pilote tourne le curseur de cap afin de l'aligner suivant le cap prévu pour sortir du virage et le rajuste une fois que l'avion a les ailes à l'horizontale. Lorsqu'on l'a trouvé, le curseur de cap du HSI du commandant était réglé à 330°.
Le pilote automatique devrait maintenant suivre l'alignement de piste en direction de la piste. Lorsque le pilote automatique et les directeurs de vol captent l'alignement de descente, les voyants APD VOR/LOC du pilote automatique et du directeur de vol demeurent allumés en vert, et le voyant APD d'alignement de descente du directeur de vol devient vert. Le pilote a ensuite recours au CWS pour apporter des corrections en tangage au pilote automatique afin de maintenir l'alignement de descente. En supposant que l'avion suit la trajectoire d'alignement de piste et de descente, il devrait atteindre la hauteur de décision à 200 pieds au-dessus de la zone de toucher des roues, approximativement à ½ mille du seuil de la piste.
Lorsque le pilote automatique fonctionne en mode VOR/LOC, la chaîne de roulis fonctionne avec une faible force de surpassement avant le sous-mode sur l'axe d'alignement de piste, et avec une grande force de surpassement après le sous-mode sur l'axe d'alignement de piste. Une force supérieure à celle de la grande force de surpassement en roulis ramène le pilote automatique au mode MAN. Des essais sur simulateur ont indiqué qu'il était possible de faire passer le pilote automatique du mode VOR/LOC à MAN en exerçant sur le volant de commande une force manuelle supérieure à la force de surpassement pertinente, sans causer de roulis.
En mode MAN, le pilote automatique répond aux commandes de roulis de CWS du pilote. Le commutateur de cap permet d'activer les sous-modes de roulis suivants : HDG HOLD, HDG SEL et HDG OFF. Si le commutateur de cap est en position HDG SEL, le pilote automatique utilise les données de cap du curseur de cap sur le HSI du commandant de bord. En sous-mode HDG SEL, la chaîne de roulis du pilote automatique fonctionne avec une grande force de surpassement, et le commutateur passe à la position centrale (HDG HOLD) si la force en roulis exercée est supérieure à la grande force de surpassement.
La régularité de la courbe du tracé de l'angle de roulis entre les points A et E dans la Figure 14 est caractéristique d'un virage amorcé et exécuté par le pilote automatique. Si le pilote avait effectué les manœuvres avec le volant de commande, la courbe du tracé de l'angle de roulis aurait été irrégulière.
Figure 14. Tracé de l'enregistreur de données de vol (FDR) donnant un aperçu du virage à MUSAT [en anglais seulement]
Cependant, si le mode VOR/LOC avait été activé avant le virage et était demeuré activé tout au long du virage, le pilote automatique aurait dû capter et suivre l'alignement de piste. Des essais sur simulateur ont indiqué que l'utilisation du mode VOR/LOC du pilote automatique donnait toujours lieu à l'interception et au suivi de l'alignement de piste ou à la convergence avec cet alignement.
Par conséquent, dans ce scénario, il est vraisemblable que le pilote automatique soit passé du mode VOR/LOC au mode MAN à un certain moment durant le virage. Ce retour au mode MAN est possible seulement si on a exercé sur le volant de commande une force supérieure à la force de surpassement pertinente.
Le scénario est examiné en relation avec 2 phases du vol :
de la fin des vérifications en approche jusqu'à ce que le vol atteigne l'axe d'alignement de piste;
après avoir traversé l'axe d'alignement de piste.
2.6.3.1 Des vérifications en approche jusqu'à l'axe d'alignement de piste
Pendant que l'avion se trouvait à plus de 2 points d'écart de l'alignement de piste (VOR/LOC armé, mais pas encore capté), la chaîne de roulis du pilote automatique aurait fonctionné à grande force de surpassement parce que le commutateur de cap était réglé à HDG SEL.
Une fois que l'avion serait arrivé à environ 2 points de l'alignement de piste, le pilote automatique serait passé au sous-mode de capture de VOR/LOC, et le commutateur de cap serait passé de HDG SEL à HDG HOLD. La chaîne de roulis du pilote automatique serait passée à la faible force de surpassement en raison du mode HDG HOLD. Si la force appliquée était supérieure à la faible force de surpassement, le sélecteur de mode du pilote automatique serait passé de VOR/LOC à MAN.
L'avion a amorcé le virage à partir d'un cap vrai de 039° (figure 14, point A) et a croisé l'axe d'alignement de piste à 16 h 38 min 32 s (point C), selon un mouvement de roulis vers la gauche pour franchir un cap vrai de 015°. Si une force supérieure à la faible force de surpassement avait été appliquée avant d'avoir traversé l'axe d'alignement de piste et si l'angle d'inclinaison de l'avion avait été inférieur à 5°, le pilote automatique aurait remis les ailes de l'avion à l'horizontale et maintenu un cap stable entre 015 °V et 039 °V, ce qui aurait amené l'avion à faire route vers le nord-est. Si l'angle d'inclinaison de l'avion avait été supérieur à 5°, le pilote automatique aurait maintenu cet angle jusqu'à la réception d'autres commandes. Cependant, les données radar et du FDR indiquent que l'avion n'a fait ni l'une, ni l'autre. En outre, les données du FDR indiquent qu'il n'y a eu aucune manœuvre du volant de commande avant que le vol traverse l'axe d'alignement de piste et que l'avion revienne les ailes presque à l'horizontale.
Par conséquent, il est peu probable qu'une force supérieure à la force de surpassement ait été appliquée ou que le pilote automatique soit passé du mode VOR/LOC à MAN durant le virage avant de traverser l'axe d'alignement de piste.
2.6.3.2 De l'axe d'alignement de piste au redressement en finale
Le pilote automatique est demeuré activé tout au long de l'approche. Pendant que l'avion faisait route vers MUSAT, avant le virage pour se placer en approche finale, le pilote automatique aurait initialement été en mode VOR/LOC armé, et le commutateur de cap réglé à HDG SEL.
Les données du FDR relatives aux manœuvres du volant de commande et à l'assiette en roulis indiquent que le virage à gauche a été amorcé au point A (figure 14). La présente rubrique porte sur les données du FDR durant le virage (du point A au point G). La rubrique 2.8 fait état des données du FDR pour la période suivant le virage (du point G au point H).
Le tracé de la position du volant de commande du point A au point B est caractéristique d'une amorce du virage par le pilote automatique lorsque l'avion a atteint 2 points d'écart à gauche de l'alignement de piste au point A, et que le pilote automatique est passé de VOR/LOC armé à capté. À ce moment, le commutateur de cap serait passé de HDG SEL à HDG HOLD, et les voyants APD VOR/LOC du pilote automatique se seraient allumés en vert. Le virage commence par une montée prononcée en douceur à mesure que le pilote automatique amorce le virage avec un mouvement de roulis vers la gauche. Le taux de roulis augmente de 0 à un maximum de 5° par seconde, coïncidant avec la manœuvre maximale du volant de commande au point B.
Le tracé de la position du volant de commande du point B au point C correspond aussi à l'exploitation du pilote automatique. Le tracé commence avec une descente prononcée dès que le pilote automatique a senti le besoin de réduire le taux de roulis, à mesure qu'approchait la limite maximale d'angle d'inclinaison de 25°. Au point C, l'angle d'inclinaison a culminé à 24° vers la gauche, et le volant de commande est retourné à la position neutre. Ce point est arrivé environ 2 secondes après que l'avion a traversé l'axe d'alignement de piste.
Le tracé de la position du volant de commande du point C au point D correspond aussi à l'exploitation du pilote automatique. Lorsque le pilote automatique a senti le besoin de commencer à sortir du virage à gauche au point C, le volant de commande a continué de se déplacer de la position neutre vers la droite. Le déplacement du volant de commande vers la droite a culminé au point D; à ce stade, l'avion était environ 1 point d'écart à droite de l'alignement de piste.
Le tracé de la position du volant de commande du point D au point E correspond aussi à l'exploitation du pilote automatique. Au point D, le pilote automatique a senti le besoin de commencer à réduire le taux de roulis vers la droite, et le volant de commande a commencé à revenir à la position neutre.
Le pilote automatique était vraisemblablement toujours en sous-mode de capture de VOR/LOC et n'était pas encore passé au sous-mode sur l'axe VOR/LOC, parce qu'entre les points D et E :
l'angle d'inclinaison était supérieur à 6° jusqu'à 16 h 38 min 47 s, environ 2 secondes avant le point E;
le taux de variation du faisceau de croisement aurait été supérieur à 2 mV par seconde, parce que l'avion était environ 1 point à droite de l'alignement de piste et dérivait.
Parce que le pilote automatique était toujours en sous-mode de capture de VOR/LOC, la chaîne de roulis du pilote automatique devait toujours fonctionner avec une faible force de surpassement (4 livres).
Du point A au point E, les barres directrices du directeur de vol auraient sollicité des virages pour coïncider avec les virages effectués par le pilote automatique.
Le tracé de la position du volant de commande du point E au point F ne correspond pas à l'exploitation du pilote automatique. Contrairement au déplacement régulier du volant de commande du point A au point E, les tracés de données indiquent plusieurs manœuvres brusques du volant de commande commençant au point E et se terminant au point F. Ces manœuvres résultaient vraisemblablement de commandes manuelles de CWS effectuées par le commandant. La manœuvre du volant de commande au point E était probablement supérieure à la faible force de surpassement de la chaîne de roulis du pilote automatique, ce qui a fait passer le mode du pilote automatique de VOR/LOC à MAN.
Au point E, les directeurs de vol auraient dû toujours être en mode AUTO APP, et les voyants APD VOR/LOC verts et d'alignement de descente jaune allumés. Le retour de mode du pilote automatique n'aurait pas eu d'incidence sur les directeurs de vol. Pendant que le pilote automatique (mode MAN et HDG HOLD) ramenait l'avion à l'horizontale, les 2 directeurs de vol auraient dû solliciter un virage à gauche parce que l'angle d'interception pour rejoindre l'alignement de piste était insuffisant.
La manœuvre du volant de commande au point E a eu lieu pendant que l'avion faisait un virage à gauche jusqu'à un cap enregistré de 334° avec une inclinaison de 5° par la gauche (16 h 38 min 49 s). À la fin de la manœuvre du volant de commande, l'angle d'inclinaison était de 2°. En mode MAN et HDG HOLD, avec une inclinaison inférieure à 5°, le pilote automatique aurait dû ramener les ailes à l'horizontale et maintenir un cap stable une fois à l'horizontale. Les données relatives au roulis et au cap entre le point F et le point G indiquent qu'en général les ailes de l'avion sont demeurées à l'horizontale.
Au point F, l'avion était approximativement 1,5 point à droite de l'alignement de piste. Si le pilote automatique était demeuré en sous-mode de capture de VOR/LOC, l'avion aurait dû continuer son roulis vers la gauche, jusqu'à un cap qui donnerait un angle d'interception approprié pour rejoindre l'alignement de piste de la droite. Une fois que l'avion eut rejoint l'alignement de piste, il aurait dû faire un léger virage à droite, jusqu'à un cap qui aurait permis de maintenir l'axe d'alignement de piste (figure 15).
Figure 15. Exemple de capture d'alignement de piste VOR/LOC (l'échelle représente les milles du seuil)
Les données du FDR indiquent que les commandes de roulis de CWS ont pris fin à 16 h 38 min 53 s. À ce moment, l'assiette en roulis présentait une inclinaison de 1° à la gauche, et le cap enregistré était de 332°. L'avion a continué son roulis et s'est stabilisé à une inclinaison de 1° à la droite à 16 h 39 min 5 s, avec un cap enregistré de 330°. L'erreur de compas était de −16°; par conséquent, le cap vrai était de 346°. Durant l'approche finale, le vent aurait entraîné une dérive de 3° vers la droite. Avec l'effet de la dérive due au vent, la trajectoire radar du vol FAB6560 s'est éloignée progressivement vers la droite de l'alignement de piste, comme indiqué à la figure 15.
Parce que l'avion n'a pas fait de virage à gauche pour rejoindre le faisceau d'alignement de piste, le pilote automatique ne pouvait pas être en mode VOR/LOC.
La position du volant de commande est demeurée inchangée du point F jusqu'à une autre commande vers la droite au point G. Les renseignements sur le cap et le roulis entre les points F et G sont caractéristiques de l'exploitation du pilote automatique en mode MAN et HDG HOLD.
2.6.3.3 Conscience du changement involontaire de mode du pilote automatique
Les indications visuelles dans le poste de pilotage du retour de mode seraient la rotation du sélecteur de mode du panneau de commande de mode du pilote automatique de VOR/LOC à MAN, et l'extinction des voyants verts APD VOR/LOC de la colonne relative au pilote automatique du commandant de bord et du P/O.
Le sélecteur de mode émet un clic en se déplaçant de VOR/LOC à MAN. Cependant, compte tenu du bruit ambiant dans le poste de pilotage en vol et du fait qu'une transmission de la tour de CYRB a eu lieu à ce moment (16 h 38 min 49 s), il est peu probable que les pilotes aient entendu ce clic.
Il y aurait eu une rotation du sélecteur de mode dans le sens antihoraire de 12 heures à approximativement 11 heures durant le changement de mode. Il est peu probable que les pilotes se soient rendu compte de ce changement.
En sous-mode de capture de VOR/LOC, le voyant APD VOR/LOC du pilote automatique devrait être allumé en vert. Lors du changement de mode, le voyant vert aurait dû s'éteindre. Cependant, le voyant APD VOR/LOC vert et d'alignement de descente jaune du directeur de vol devaient rester allumés. Il est peu probable que les pilotes se soient rendu compte de l'absence de ce voyant, plus particulièrement en présence d'autres voyants allumés sur l'APD. Aucune discussion n'a été enregistrée entre les pilotes au sujet de ces indications. Il est par conséquent vraisemblable que l'équipage ne se soit pas rendu compte du changement de mode du pilote automatique.
2.6.4 Sommaire de l'analyse du virage
À 16 h 38 min 50 s, au moment où le vol FAB6560 sortait du virage pour se placer en approche finale à droite de l'alignement de piste, le commandant de bord a vraisemblablement effectué une manœuvre de roulis au volant de commande, forçant le retour du pilote automatique du sous-mode de capture de VOR/LOC aux modes MAN et HDG HOLD.
Une fois en mode HDG HOLD, le pilote automatique aurait ramené et maintenu les ailes de l'avion à l'horizontale, sauf si le pilote aux commandes (PF) avait exécuté d'autres commandes de CWS. Les données du FDR indiquent que l'avion est revenu presque à l'horizontale à 16 h 39 min 5 s, avec un cap enregistré de 330°. Ce cap aurait aussi été affiché au HSI du commandant.
Figure 16. 16 h 39 min 10 s : Indicateur de situation horizontale (HSI) du commandant, indiquant un angle d'interception de 17° (compas no 2 avec erreur de cap de −16°)
Comme l'indique la figure 16, le cap indiqué de 330° aurait donné au commandant l'impression que l'angle d'interception était de 17° pour retourner à la trajectoire de l'axe d'alignement de piste de 347°.
Le cap du compas no 1 est affiché au HSI du P/O. Puisqu'aucune discussion au sujet du voyant du comparateur de cap n'a été enregistrée, le compas no 1 aurait dû être à ±8° du compas no 2. Par conséquent, le cap affiché au HSI du P/O aurait dû être de ±8° par rapport au cap du commandant. Ainsi, l'angle d'interception au HSI du P/O aurait été au moins de 9° et au plus de 25°.
Le HSI est le principal instrument de navigation des 2 pilotes. La relation angulaire entre le cap et l'alignement de piste (figure 16) aurait représenté une importante confirmation visuelle pour les 2 pilotes que l'angle d'interception était satisfaisant et que cet angle permettrait à l'avion de retourner sur l'axe d'alignement de piste. Cependant, en raison d'une erreur de compas de −16° à ce stade du vol, le cap vrai de l'avion était de 346°, comme indiqué la figure 17. Avec une dérive due au vent de 3° vers la droite, la trajectoire résultante de l'avion (349 °V) s'est éloignée davantage vers la droite de l'alignement de piste.
Avec un angle d'interception de 17°, l'avion aurait dû reprendre l'axe d'alignement de piste. Les 2 HSI auraient indiqué cette correction par le déplacement vers l'intérieur de la barre d'écart de route. Cependant, en raison de l'erreur de compas, du mode du pilote automatique et de la dérive due au vent, la trajectoire de l'avion s'est décalée davantage vers la droite par rapport à l'alignement de piste. Les 2 HSI auraient indiqué cette divergence par le déplacement continu vers l'extérieur de la barre d'écart de route.
La divergence de trajectoire ne correspondait pas à l'angle d'interception perçu et aux attentes des pilotes relativement à la reprise de la trajectoire. Cette divergence aurait eu une incidence négative sur la conscience de la situation des pilotes et aurait augmenté leur charge de travail alors qu'ils essayaient de comprendre cette ambiguïté et de la résoudre.
2.7 Charge de travail et interaction de l'équipage durant le virage pour se placer en approche finale
Les rubriques précédentes portaient surtout sur le fonctionnement des systèmes de navigation. Au cours de la même période, l'équipage a aussi entrepris des tâches en vue de configurer l'avion pour l'atterrissage.
Lorsque le commandant a demandé de régler les volets à la position 1 à 16 h 37 min 25 s, l'avion franchissait une altitude de 4500 pieds en descente à 225 KIAS, en direction de MUSAT (annexe D). Le commandant de bord était vraisemblablement conscient du fait que l'avion était trop haut et que sa vitesse était légèrement trop élevée, et n'a pas tardé à agir pour le préparer en vue de l'approche finale.
À 16 h 37 min 42 s, le commandant a demandé le réglage des volets à la position 5 et a demandé d'effectuer la liste de vérifications avant l'atterrissage. La première partie de la liste de vérifications avant l'atterrissage a été terminée avec célérité, mais sans presse; à 16 h 38 min 5 s, le P/O a indiqué que la liste de vérifications avait été interrompue au train d'atterrissage et aux volets. À 16 h 38 min 20 s, le P/O a annoncé que l'alignement de piste fonctionnait et, à 16 h 38 min 22 s, l'avion a amorcé le virage pour se placer en approche finale.
Au cours de la période de 16 h 38 min 19 s à 16 h 38 min 56 s, l'activité normale pour le commandant aurait été de surveiller le pilote automatique pendant le virage pour se placer en approche finale et de dire au P/O de commencer à configurer l'avion en vue de l'atterrissage. Le P/O a réalisé plusieurs tâches au cours de cette même période. Il surveillait la position de l'avion, comme en témoignent ses déclarations concernant le fonctionnement de l'alignement de piste et de descente; il était en communication avec la tour, et il reconfigurait l'avion en réponse aux demandes du commandant de sortir le train d'atterrissage et de régler les volets à la position 15.
La demande du commandant concernant le train d'atterrissage est venue juste après l'appel à la tour du P/O pour se rapporter à 10 milles. Le P/O était occupé avec le déploiement du train d'atterrissage et a manqué l'instruction de la tour de se rapporter à 3 milles en finale. Le commandant a ensuite demandé de régler les volets à la position 15, et le P/O aurait eu à déplacer le levier de commande des volets avant de demander à la tour de répéter la transmission. Le P/O a ensuite confirmé que le train d'atterrissage était sorti, a reçu et confirmé la retransmission de l'instruction de la tour de se rapporter à 3 milles en finale et a confirmé que les volets étaient réglés à la position 15.
La séquence des événements indique que le commandant croyait vraisemblablement que la poursuite de la configuration de l'avion avait une priorité plus élevée que la communication du P/O avec la tour. Cette perception est conforme aux principes généralement acceptés de la discipline aéronautique (hiérarchie des tâches : piloter, naviguer, communiquer).
Cependant, cette séquence a eu pour effet d'augmenter la charge de travail du P/O durant cette période de 37 secondes : l'exécution de ces tâches a nécessité 7 déclarations verbales, en plus de la surveillance des instruments et du déplacement des leviers de commande du train d'atterrissage et des volets. Outre les interventions verbales et physiques, les tâches ont aussi demandé un effort cognitif pour assimiler et traiter l'information. Le P/O avait donc une charge de travail intense durant cette période.
Afin d'éviter que l'avion atteigne l'état indésirable de déviation complète par rapport à l'alignement de piste, la SOP exigeait que le pilote qui n'était pas aux commandes (PNF) annonce « Localizer » [traduction : alignement de piste] pour un écart de 1 point ou plus. La réponse requise du PF était « Correcting » [traduction : correction]. Cependant, au moment où vol FAB6560 franchissait 1 point d'écart vers la droite, à 16 h 38 min 43 s, le commandant venait juste de demander les volets à la position 15, et le P/O aurait été en train de se pencher vers le levier de commande des volets pour le déplacer. Il n'y a pas eu d'annonce « localizer » lorsque l'écart était de 1 point, soit parce que le P/O n'a pas remarqué l'écart d'alignement de piste, soit parce qu'il a jugé que cet écart était de priorité moindre que les changements de configuration et les communications radio.
2.8 Sortie du virage et poursuite de l'approche
2.8.1 État de l'avion à la sortie du virage
À 16 h 39 min 5 s, l'avion est sorti du virage à 1 ½ point à droite de l'alignement de piste et à 1 ½ point au-dessus de l'alignement de descente à 3100 pieds au-dessus du niveau de la mer (asl). La configuration était alors la suivante : le train d'atterrissage était sorti, les volets étaient réglés en position 15 et l'avion se déplaçait à une vitesse de 168 KIAS. Le pilote automatique était vraisemblablement en mode MAN avec HDG HOLD.
2.8.2 Divergence initiale par rapport à l'alignement de piste
2.8.2.1 Données de l'enregistreur de données de vol
À 16 h 39 min 18 s (ligne G de la figure 14), il y a eu une manœuvre du volant de commande vers la droite. Ce mouvement correspondait davantage à une commande manuelle de roulis de CWS effectuée par le PF qu'à une commande de roulis du pilote automatique.
Lorsque la commande de CWS a pris fin, le volant de commande est retourné à la position neutre, et les ailes de l'avion sont revenues à l'horizontale. L'intervalle qui reste entre le point G et le point H indique que le volant se déplaçait graduellement de la position neutre à 4° vers la droite, puis est revenu à 2° à droite au point H. L'angle de roulis, le taux de roulis et le cap au cours de cette période indiquent que les ailes de l'avion étaient à l'horizontale, malgré l'angle du volant de commande. Une fois de plus, cette information est conforme au fonctionnement du pilote automatique en mode MAN et HDG HOLD.
Au point H, il y a eu une autre manœuvre du volant de commande, cette fois-ci vers la gauche, initialement. Elle a culminé à 10° à gauche, puis la direction a changé vers la droite, en passant par la position neutre jusqu'à 6° à droite. Ces manœuvres correspondent aux commandes manuelles de roulis de CWS effectuées par le PF.
Lorsque la pression sur le volant a été relâchée à 16 h 39 min 39 s, le pilote automatique est presque certainement retourné au mode HDG HOLD. Les données du FDR indiquent que le volant de commande s'est lentement déplacé de 6° à droite jusqu'à la position neutre à 16 h 39 min 50 s. Les données relatives au roulis sont légèrement décalées par rapport aux données sur la position du volant de commande, les ailes de l'avion retournant à l'horizontale à 16 h 40 min 7 s. Les données sur le cap correspondent à celles sur le roulis, le cap enregistré se stabilisant à environ 330°.
2.8.2.2 Modèles mentaux de l'équipage après le virage pour se placer en approche finale
De 16 h 39 min 13 s à 16 h 39 min 30 s (annexe A), le P/O a fait 5 déclarations au sujet de la divergence progressive de l'avion vers la droite de la trajectoire voulue, indiquant qu'il surveillait de près la position de l'avion. Le commandant a accusé réception de la déclaration initiale du P/O. Au cours de cette période, à 16 h 39 min 23 s, le vol FAB6560 a atteint une position de 2 points à la droite de l'alignement de piste et toujours 1 ½ point au-dessus de l'alignement de descente. À 16 h 39 min 24,2 s, le P/O a fait une déclaration relative à une déviation complète par rapport à l'alignement de piste.
À 16 h 39 min 33 s et à 16 h 39 min 36 s, le commandant a fait 2 déclarations qui portent à croire qu'il était d'avis que le pilote automatique suivait correctement la trajectoire. Ces déclarations coïncident avec la manœuvre du volant de commande au point H dont il est question à la rubrique précédente.
Le commandant croyait probablement que le pilote automatique était toujours en mode VOR/LOC, parce que le virage avait été amorcé en VOR/LOC et que l'avion en était sorti à un angle d'interception raisonnable après le dépassement initial de l'alignement de piste. Les déclarations du commandant et la manœuvre du volant de commande au point H suggèrent que le commandant effectuait probablement un essai pour vérifier si le mode du pilote automatique correspondait à son modèle mental.
Le modèle mental du commandant était vraisemblablement que le pilote automatique allait intercepter l'alignement de piste de nouveau à partir de la droite et qu'un atterrissage suivrait. Cependant, le P/O avait vraisemblablement comme modèle mental que l'avion dérivait toujours vers la droite de la trajectoire voulue, malgré l'angle d'interception apparent. Cette différence des modèles mentaux est la première indication que la conscience commune de la situation des pilotes se détériorait.
Les directeurs de vol sont vraisemblablement passés du mode d'interception d'AUTO APP à la capture d'AUTO APP au point A à 16 h 38 min 21 s à l'amorce du virage. Au point E, le sous-mode du pilote automatique est passé de capture de VOR/LOC à MAN et HDG HOLD. Cependant, les manœuvres du volant de commande n'auraient eu aucune incidence sur les directeurs de vol, qui seraient restés en mode AUTO APP. Par conséquent, les barres directrices auraient sollicité un virage à gauche en direction du radiophare d'alignement de piste, les voyants APD VOR/LOC du directeur de vol seraient demeurés allumés en vert et les voyants d'alignement de descente seraient demeurés allumés en jaune.
Si le signal d'écart de LOC dépasse la limite (2,5° pour l'alignement de piste) dans les 90 secondes suivant la capture de LOC, le voyant jaune APD VOR/LOC du directeur de vol s'allume et le voyant vert s'éteint, pendant que le directeur de vol revient de la capture de LOC à l'interception de LOC.
À 16 h 39 min 51 s, 90 secondes après le passage des directeurs de vol au mode capture d'AUTO APP au point A, l'écart de l'avion par rapport à l'axe d'alignement de piste était supérieur à 2,5°. Les 2 directeurs de vol sont vraisemblablement retournés au mode d'interception d'AUTO APP. Les barres directrices auraient ensuite donné des directives pour atteindre et maintenir le cap sélectionné au HSI.
Lorsqu'on l'a trouvé, le curseur de cap du HSI du commandant de bord était réglé à 330°. À 16 h 39 min 51 s, à la fin de la période de 90 secondes, le cap enregistré était de 329°. En supposant que le curseur de cap du commandant était réglé à 330°, il n'y aurait eu qu'une différence de 1° entre le cap indiqué et le cap sélectionné, et toute sollicitation de roulis du directeur de vol aurait été presque imperceptible. Par conséquent, il est probable que le directeur de vol du commandant sollicitait les ailes à l'horizontale, ou presque, après être retourné au mode d'interception d'AUTO APP. Cet état aurait fortement renforcé la conviction du commandant que l'angle d'interception apparent pour rejoindre l'alignement de piste était suffisant. Cependant, la barre d'écart de route du HSI serait restée à la déviation complète (2 points) malgré toute déviation supplémentaire au-delà de 2 points par rapport à l'alignement de piste.
Les indications qui auraient permis au commandant de se rendre compte du changement de mode du directeur de vol auraient été un changement de position des barres directrices, sollicitant d'abord un virage à gauche pour ensuite solliciter les ailes à l'horizontale, et le voyant APD VOR/LOC du directeur de vol passant du vert au jaune. Les barres directrices se trouvent sur l'indicateur directeur d'assiette (ADI), et les voyants APD sont au-dessus de l'altimètre, environ à 6 pouces à droite de l'ADI.
Si l'attention du commandant portait sur autre chose au moment de ces changements, le commandant aurait eu plus de difficulté à détecter le changement d'état des instruments lorsqu'il y aurait rapporté son attention. Par conséquent, il est possible que le commandant n'ait pas détecté le changement de mode du directeur de vol.
S'il n'y avait pas eu de changement de mode, et si les barres directrices du commandant avaient continué de solliciter un virage à gauche pour rejoindre l'alignement de piste, il est extrêmement improbable que le commandant ait ignoré cet état sans faire de commentaire. Étant donné les déclarations répétées du P/O au sujet des multiples indications de déviation par rapport à l'alignement de piste, si les barres directrices de son directeur de vol avaient sollicité un virage à gauche, il est presque certain qu'il l'aurait mentionné. Il n'y a eu, pendant l'approche, aucune discussion entre les pilotes au sujet des barres directrices ou des voyants APD, ce qui suggère que ni l'un ni l'autre des pilotes n'était conscient du changement de mode.
Le P/O a continué d'exprimer sa préoccupation au sujet du fait que l'avion continuait de dériver progressivement vers la droite. Il a aussi indiqué qu'une deuxième NAVAID, le GPS, confirmait qu'ils étaient à droite de la trajectoire voulue. Le retour de mode du directeur de vol s'est vraisemblablement produit presque au même moment où le P/O a mentionné le GPS. Le P/O regardait peut-être le GPS, celui-ci se trouvant sur la console centrale près de son genou gauche. Si les changements des barres directrices et des voyants APD du directeur de vol se sont produits pendant que le P/O prêtait son attention au GPS, ce dernier aurait eu plus de difficulté à détecter le changement d'état des instruments lorsqu'il y aurait ramené son attention. Par conséquent, il est possible que le P/O n'ait pas détecté le changement de mode du directeur de vol.
On n'a pas trouvé le curseur de cap du HSI du P/O, son réglage étant donc inconnu. En supposant que le P/O avait aussi réglé son curseur de cap au cap de l'avion à sa sortie du virage, son directeur de vol, une fois en mode d'interception d'AUTO APP, aurait aussi sollicité les ailes à l'horizontale, ou presque. La déclaration du P/O à 16 h 39 min 57 s suggère que son directeur de vol était à la position AUTO APP, mais il n'a pas mentionné l'état des voyants APD. Le P/O faisait probablement référence au sélecteur de mode de son directeur de vol réglé en position AUTO APP. Peu importe si le P/O était conscient du changement de mode du directeur de vol, sa compréhension de l'écart de trajectoire était fondée sur la barre d'écart de route du HSI et sur le GPS. Ces 2 indicateurs concordaient avec son modèle mental selon lequel l'avion était à la droite de la trajectoire et que les pilotes devaient remettre les gaz, comme en témoignent les déclarations répétées à cet égard.
De 16 h 39 min 51 s jusqu'à 16 h 41 min 5 s, le cap enregistré variait de 329° à 332°. Avec le curseur de cap du HSI du commandant réglé à 330°, les barres directrices de son directeur de vol auraient sollicité les ailes à l'horizontale.
Les pilotes ne se sont probablement pas rendu compte que les directeurs de vol étaient retournés au mode d'interception d'AUTO APP. Dans ce mode, les barres directrices du directeur de vol donnent des indications de roulis en fonction du cap sélectionné (sollicitation des ailes à l'horizontale) plutôt qu'en fonction de l'alignement de piste (sollicitation de virage à gauche). La concordance apparente entre le HSI (à droite de la trajectoire) et le directeur de vol (ailes à l'horizontale) a vraisemblablement donné au commandant l'impression que l'angle d'interception était suffisant pour ramener l'avion sur la trajectoire sélectionnée. Le P/O a vraisemblablement accordé plus de poids aux renseignements sur la position de la barre d'écart de route et du GPS. Cette situation représentait une divergence des modèles mentaux qui a réduit la capacité de l'équipage à résoudre les problèmes de navigation.
2.8.3 Déviation complète de l'alignement de piste
Les HSI indiquaient vraisemblablement une déviation complète de l'alignement de piste après 16 h 39 min 23 s. Au cours des 44 secondes suivantes, les pilotes discutaient de la position de l'avion. À 16 h 39 min 24,2 s, le P/O a déclaré « Now we're through it » [traduction : nous l'avons maintenant traversé]. Cette déclaration était probablement une tentative d'avertir le commandant de la déviation complète. Tout au long de la discussion, le P/O a continué de surveiller la position de l'avion; à 16 h 40 min 7 s, le P/O a déclaré qu'une déviation complète avait été atteinte (annexe D). Le propos a été formulé comme une question nécessitant une confirmation de la part du commandant. À ce moment, l'avion était à 4,7 nm du seuil de la piste et à environ 2800 pieds à droite de l'alignement de piste, bien au-delà de 2 points.
La déviation complète est un état indésirable de l'aéronef parce que, lorsqu'elle se produit, les marges de sécurité ne sont plus assurées. L'affichage du HSI étant limité à une déviation maximale de 2 points, les pilotes n'ont pas d'indication de l'ampleur des écarts supérieurs à 2 points. Comme il est précisé à la rubrique 1.17.2.8.2, on enseigne aux pilotes, dans le cadre de leur formation initiale de vol aux instruments, qu'une déviation complète par rapport à l'alignement de piste exige l'interruption de l'approche. L'AOM prévoit une annonce qui doit être faite chaque fois que l'écart par rapport à l'alignement de piste est supérieur à 1 point du centre, mais ne prévoit aucune annonce et réponse normalisées dans le cas d'une déviation complète.
À 16 h 40 min 8 s, le commandant a confirmé qu'il y avait déviation complète et a indiqué qu'il ne pouvait pas concilier la déclaration du P/O au sujet de la déviation complète avec son propre modèle mental selon lequel l'avion allait intercepter de nouveau l'alignement de piste à partir de la droite.
À 16 h 40 min 11 s, le P/O a déclaré être certain que l'avion n'était pas sur la trajectoire d'alignement de piste. À 16 h 40 min 14 s, le commandant a indiqué qu'il était toujours convaincu que le pilote automatique était en mode VOR/LOC et avait capté l'alignement de piste, et il a confirmé qu'ils avaient sélectionné la bonne fréquence ILS.
À 16 h 40 min 17 s, le P/O a exprimé son désaccord à l'égard de la capture de l'alignement de piste et a mentionné la colline à la droite de l'aéroport. Cette communication indique que le P/O savait que le pilote automatique n'avait pas capté l'alignement de piste et qu'il comprenait que la colline représentait un danger.
À 16 h 40 min 23 s, le P/O a déclaré une fois de plus que le GPS indiquait un écart à droite de la trajectoire.
L'équipage n'a pas maintenu une conscience commune de la situation. À mesure que l'approche s'est poursuivie, les pilotes n'ont pas communiqué efficacement leur perception, compréhension et projection relatives à l'état de l'avion.
2.8.4 Suggestion de remise des gaz
Durant le virage pour se placer en approche finale, lorsque l'avion est passé au-delà de 1 point à la droite de l'alignement de piste, le P/O était occupé à des tâches de configuration et de communication. Par conséquent, il n'y a pas eu d'annonce « localizer » [traduction : alignement de piste].
Après la sortie du virage, le P/O a signalé que l'avion était à la droite de l'alignement de piste et qu'il s'en éloignait. Même si le P/O n'a pas utilisé la phraséologie requise, soit « localizer », pour avertir le commandant de l'écart, il a essayé à maintes reprises de signaler le problème, comme il était tenu de le faire selon les principes de la liste de vérifications décrite à la page 03.20.2 du volume 1 de l'AOMFootnote 158. Pour ce faire, il a fait référence à la fois à l'alignement de piste et à la trajectoire d'approche finale RNAV de la piste 35T (degrés vrais).
Cette communication a eu lieu dans le cadre d'une discussion de 80 secondes (de 16 h 39 min 13 s à 16 h 40 min 33 s) entre les pilotes portant exclusivement sur la navigation de l'avion. Les déclarations du P/O n'ont eu aucune incidence sur les actions du commandant, vraisemblablement parce qu'elles faisaient mention de paramètres plutôt que de conséquences et de mesures requises. Un langage faisant état de conséquences et de mesures requises serait par exemple : « Nous risquons de heurter la colline; il faut remettre les gaz ».
Les pilotes se sont mis à la résolution du problème de navigation et ont remis à plus tard la configuration de l'avion en vue de l'atterrissage. Cette résolution de problèmes était une tâche supplémentaire, qui n'est pas normalement liée à cette phase critique de vol, et n'a fait qu'accroître la charge de travail sans régler le problème.
La situation s'est compliquée davantage du fait que chacun des pilotes essayait de trouver une solution à un problème différent. Le commandant essayait de résoudre le problème de l'interception de l'alignement de piste et de faire atterrir l'avion, et le P/O essayait de faire changer la façon de procéder du commandant et d'amorcer une remise des gaz. En fait, ni l'un ni l'autre des pilotes ne communiquait efficacement pour remédier à la situation.
La discussion n'a pas rassuré le P/O au sujet de la trajectoire de l'avion, ni n'a fait changer la façon de procéder du commandant. Par conséquent, à 16 h 40 min 30 s, le P/O a suggéré, de manière informelle, qu'ils amorcent une remise des gaz et discutent ensuite de l'anomalie.
Cependant, la déclaration a été exprimée comme une opinion et ne comprenait pas l'expression « go-around » [traduction : remise des gaz]. Cette déclaration indique que le P/O avait maintenant comme modèle mental une déviation complète de l'avion par rapport à l'alignement de piste et qu'une remise des gaz s'imposait. La suggestion n'était pas suffisamment assertive à un moment où une forme de communication autoritaire était requise, et elle n'a pas convaincu le commandant d'interrompre l'approche.
Il existe de nombreuses raisons possibles pour expliquer la façon dont le P/O a formulé la suggestion de remise des gaz. La déviation complète de l'alignement de piste est rare dans le cadre des opérations modernes de transport aérien, et il se peut que le P/O n'avait pas eu à gérer une situation de déviation complète depuis sa formation initiale de vol aux instruments. De plus, malgré l'existence d'une annonce particulière dans l'AOM pour désigner une déviation de plus de 1 point, aucune directive n'est donnée concernant les phrases à utiliser ou les mesures à prendre en cas de déviation complète. Vraisemblablement, la remise des gaz est une manœuvre vue plus souvent dans le cadre de la formation sur simulateur qu'en service de ligne, et elle est habituellement amorcée au point d'approche interrompue, plutôt que plusieurs milles avant le point d'approche interrompue.
Dans le cas d'une approche ILS, l'AOM précise des phrases que le PNF et le PF doivent utiliser à la hauteur de décisionFootnote 159 (se reporter à la rubrique 1.17.2.9.1 du présent rapport). Les annonces normalisées du PNF sont « Minimums, runway in sight » [traduction : minimums, piste en vue] ou « Minimums, no contact » [traduction : minimums, pas de contact]. Les phrases ne font pas référence à une remise des gaz, mais elles avertissent le PF quant à l'état de l'aéronef et exigent que le PF prenne une décision. Selon les renseignements sur l'état de l'avion fournis par le PNF, le PF indique s'il continue l'atterrissage ou s'il remet les gaz. S'il décide de remettre les gaz, le PF annonce « Go-around thrust, flap 15 » [traduction : poussée de remise des gaz, volets à la position 15]. La procédure de remise des gaz (reproduite à la rubrique 1.17.2.9.1, figure 7) indique une phrase légèrement différente pour le PF : « Go-around, flaps 15 » [traduction : remise des gaz, volets à la position 15]Footnote 160.
Les directives des SOP pour le PNF indiquent seulement de fournir de l'information au PF. C'est le PF qui prend ensuite la décision de remettre les gaz, et il amorce la remise des gaz avec la commande : « Go-around, flaps 15 ».
En l'absence de phraséologie normalisée propre à la situation dans laquelle il se trouvait, le P/O a dû improviser sa suggestion de remettre les gaz.
2.8.5 Poursuite de l'approche après la déviation complète
En cas de déviation complète, la remise des gaz est un moyen de défense contre le risque de collision avec le relief hors de la zone ILS protégée.
À 16 h 40 min 33 s, le commandant a accusé réception de la suggestion du P/O et a indiqué qu'il allait continuer l'approche. L'accusé de réception du commandant de la suggestion du P/O concernant la remise des gaz indique que le commandant a entendu la suggestion.
Les paragraphes suivants décrivent le modèle mental probable du commandant et expliquent pourquoi il trouvait logique de continuer l'approche, étant donné sa perception et sa compréhension de la situation, et malgré les communications du P/O.
Le commandant pensait probablement qu'il maîtrisait l'avion par l'intermédiaire du pilote automatique, et que le pilote automatique naviguait pour revenir à l'alignement de piste et à l'alignement de descente. En même temps, il essayait vraisemblablement de concilier son modèle mental avec le déplacement et la position de la barre d'écart de route de son HSI. Ces tâches représentaient une lourde charge de travail pour le commandant de bord.
Les pilotes disposent d'un certain nombre d'indices extérieurs dans le poste de pilotage pour les tenir informés de la progression des modes d'approche du pilote automatique. Comme il est mentionné à la rubrique 2.6.3.3, l'équipage n'a vraisemblablement pas perçu ces indices ni établi qu'ils correspondaient au changement de mode du pilote automatique de VOR/LOC à MAN.
À ce moment, l'action souhaitée du commandant était vraisemblablement de maintenir le cap actuel afin d'intercepter de nouveau l'alignement de piste, et au bout du compte, d'atterrir à CYRB. Les éléments suivants ont eu une influence sur son plan d'action :
Le mode du pilote automatique est probablement passé à MAN et à HDG HOLD durant la sortie du virage; cependant, le commandant croyait toujours qu'il était en mode VOR/LOC et qu'il interceptait l'alignement de piste et le suivrait.
Le cap erroné affiché a donné l'apparence d'un angle d'interception quand, en fait, le cap vrai était différent. Cet indice important, qui appuyait sa décision, était affiché directement devant lui sur le HSI.
Le directeur de vol du commandant était vraisemblablement en mode d'interception d'AUTO APP, et aurait sollicité les ailes à l'horizontale.
Le commandant avait déjà réussi des atterrissages dans de mauvaises conditions météorologiques.
Le commandant s'attendait possiblement à percer la base des nuages et à acquérir des références visuelles à une altitude de 700 pieds agl ou moins. Cette attente d'acquérir des références visuelles aurait appuyé le plan d'action du commandant de faire atterrir l'avion. (L'équipage savait que les conditions météorologiques à CYRB avaient changé de 200 pieds agl et ½ sm à 15 h à 700 pieds agl et 10 sm à 16 h).
Une remise des gaz est habituellement amorcée au point d'approche interrompue plutôt que plusieurs milles avant ce point.
Une augmentation du stress peut entraîner un rétrécissement attentionnel (rubrique 1.17.8.3) et peut avoir une incidence négative sur la capacité du pilote à percevoir et à évaluer des indices extérieurs. Le rétrécissement attentionnel peut se traduire par un préjugé de confirmation, qui entraîne les gens à trouver des indices qui appuient le plan d'action choisi au point de possiblement exclure une autre hypothèse moins désirable.
La suggestion du P/O de remettre les gaz représente cette autre hypothèse. Plusieurs indices appuyaient cette hypothèse :
le déplacement de la barre d'écart de route vers la gauche jusqu'à la déviation complète;
les indications du GPS;
les multiples déclarations du P/O.
Compte tenu de la charge de travail du commandant, il devait vraisemblablement composer avec un niveau de stress élevé. Ce stress l'aurait rendu susceptible à l'influence du préjugé de confirmation et du rétrécissement attentionnel. Cette susceptibilité aurait compliqué, pour le commandant, la perception et l'évaluation d'autres indices que ceux offerts par le P/O, la barre d'écart de route et le GPS. En outre, à titre de PF, le commandant avait comme rôle principal de maîtriser l'avion, ce qui réduisait le temps dont il disposait pour garder une vue d'ensemble de la situation et formuler une stratégie.
Le commandant ne comprenait probablement pas complètement l'information indiquant que son plan initial n'était plus viable. Même si le commandant comprenait vraisemblablement la suggestion du P/O de remettre les gaz, celle-ci était incompatible avec son plan d'effectuer l'approche et d'atterrir. Par conséquent, la suggestion du P/O aurait été moins désirable pour le commandant.
Le commandant a répondu au P/O immédiatement après que le P/O eut fini de parler; le commandant n'a pas pris le temps d'évaluer la suggestion du P/O. L'absence de toute évaluation de la suggestion du P/O indique que le commandant souffrait des effets de la tendance à s'en tenir au plan (rubrique 1.18.1). Le commandant a vraisemblablement reporté toute décision de remettre les gaz et s'en est remis par défaut à son plan initial d'intercepter de nouveau l'alignement de piste et ensuite d'atterrir.
Le désaccord fondamental entre la suggestion de remettre les gaz et la poursuite de l'approche est un bon indicateur que la conscience commune de la situation des pilotes se dégradait davantage. Cette dégradation a eu pour conséquence de compromettre la capacité des pilotes à communiquer efficacement, et elle constituait un problème supplémentaire que l'équipage devait régler.
À 16 h 40 min 35 s, le P/O a accusé réception de la déclaration du commandant et l'approche s'est poursuivie.
2.8.6 Approche instable et poursuite de l'approche
Les SOP exigent que le PNF fasse une annonce (contre-vérification de la position, de l'altitude, de l'altimètre et des instruments) au repère d'approche finale (FAF) et une annonce lorsque les paramètres dépassent les tolérances une fois à l'intérieur du FAF (rubriques 1.17.2.8.3 et 1.17.2.8.5). Le P/O n'a pas fait d'annonce lorsque le vol FAB6560 a croisé le FAF POKAN par le travers, ni n'a fait d'annonce concernant la vitesse excessive.
L'absence de ces annonces est révélatrice de la lourde charge de travail du P/O à l'intérieur du FAF, ainsi que de ses priorités, du fait qu'il était presque certainement plus préoccupé à convaincre le commandant d'amorcer une remise des gaz qu'à apporter des corrections aux paramètres d'approche individuels.
Les critères d'approche stabilisée de l'entreprise étaient décrits dans le First Air Flight Operations Manual (FOM)Footnote 161 (se reporter à la rubrique 1.17.2.8.4 du présent rapport). Même si le FOM procurait une orientation sur les politiques, il n'y avait pas d'orientation procédurale complémentaire dans l'AOM pour décrire la mise en œuvre de la politique, contrairement à d'autres événements, notamment l'atteinte de la hauteur de décision, pour lesquels on précisait la phraséologie normalisée et les mesures précises. En l'absence d'un cadre procédural pour amorcer une remise des gaz en cas d'approche non stabilisée, les pilotes ont dû improviser.
Les enquêteurs ont étudié comment les pilotes de B737 de First Air basés à CYZF s'y prendraient, dans un rôle de PNF, pour aviser le PF d'une approche non stabilisée et de la nécessité de remettre les gaz. Les pilotes savaient qu'il n'existait pas de SOP pour cette situation, et leurs réponses variaient. Certains pilotes ont eu la difficulté à répondre à la question, prenant jusqu'à 90 secondes pour formuler une réponse, alors que cette situation exigerait une intervention immédiate dans le poste de pilotage.
À 16 h 40 min 41,9 s, le P/O a déclaré « We're 3 mile final; we're not configged » [traduction : à 3 milles en finale; nous ne sommes pas configurés]. L'avion suivait l'alignement de descente à 1140 pieds asl (920 pieds au-dessus de l'altitude de l'aéroport) avec le train d'atterrissage sorti et les volets à la position 15. La poussée des moteurs était ramenée au ralenti, probablement parce que le commandant devait réduire la vitesse afin de modifier davantage la configuration. L'avion se trouvait à 2,9 nm du seuil de la piste, les HSI indiquant une déviation complète de l'alignement de piste.
La politique de l'entreprise relative aux approches stabilisées s'appliquait à un seuil de 1000 pieds au-dessus de l'altitude de l'aéroport, et exigeait une remise des gaz immédiate si l'approche n'était pas stabilisée. À ce moment, l'approche du vol FAB6560 était non stabilisée selon plusieurs paramètresFootnote 162 :
la déviation par rapport à l'alignement de piste était supérieure à 2 points;
d'importants changements au cap et au tangage étaient requis pour maintenir la bonne trajectoire de vol;
la vitesse était de 176 KIAS, soit VREF + 44 nœuds;
l'avion n'était pas configuré en vue de l'atterrissage;
la liste de vérifications avant l'atterrissage n'était pas terminée.
Compte tenu des préoccupations exprimées par le P/O à maintes reprises plus tôt au cours de l'approche, il est presque certain qu'en avisant le commandant qu'ils étaient à 3 milles et qu'ils n'étaient pas configurés, le message qu'il avait l'intention de transmettre était « l'approche est non stabilisée et il faut remettre les gaz ».
Les procédures en matière de clarté et d'uniformité des communications visent à prévenir la confusion entre les pilotes. Dans le cas présent, le P/O fournissait de l'information cohérente au commandant au sujet de la position et de l'état de l'avion. Cependant, l'annonce « We're 3 mile final; we're not configged » a été immédiatement suivie du commandant ordonnant la sélection des volets à la position 25. Cette séquence indique que le message perçu par le commandant était « nous devons effectuer la configuration en vue de l'atterrissage ». Il fallait intervenir immédiatement pour amorcer une remise des gaz, et les communications du P/O au sujet de l'approche non stabilisée n'étaient pas claires.
Le P/O avait précédemment fait une suggestion de remettre les gaz en employant un langage non uniformisé et inefficace. De même, la déclaration du P/O à 3 milles était inefficace parce qu'elle ne comprenait que de l'information sur la position et l'état de l'avion. Ce que le P/O essayait de dire était qu'il fallait amorcer une remise des gaz, mais sa déclaration pouvait être mal interprétée.
À 16 h 40 min 45 s, la réponse du commandant à l'annonce de 3 milles du P/O était de demander les volets à la position 25. Cette réponse suggère que le commandant a vraisemblablement mal interprété la déclaration du P/O comme une incitation à finir de configurer l'avion en vue de l'atterrissage au lieu de comprendre le message réel du P/O, soit que l'approche était instable et qu'une remise des gaz était nécessaire.
Le commandant a détourné son attention de l'écart par rapport à la trajectoire pour se concentrer sur la configuration rapide de l'avion en vue de l'atterrissage. Ce détournement de l'attention suggère en outre que le commandant avait l'intention de poursuivre le plan d'action qu'il avait choisi, soit d'atterrir à CYRB. Vraisemblablement, il subissait toujours les effets d'un rétrécissement attentionnel et de la tendance à s'en tenir au plan.
Les paragraphes qui suivent traitent des modèles mentaux vraisemblables de l'équipage et expliquent pourquoi le commandant trouvait logique de continuer l'approche, étant donné sa perception et sa compréhension de la situation.
À ce stade, la charge de travail du commandant s'était alourdie davantage. Il était toujours le PF et il était toujours occupé à aligner l'avion sur la trajectoire pendant qu'il intégrait de nouveaux renseignements dans son modèle mental. Il avait maintenant la tâche supplémentaire de configurer l'avion rapidement avant l'atterrissage. Par conséquent, le commandant était vraisemblablement encore plus susceptible de s'en tenir à son plan à ce moment qu'il ne l'était 12 secondes plus tôt.
Compte tenu de la charge de travail et du modèle mental du commandant, il est vraisemblable que seuls des renseignements clairs et sans équivoque auraient pu changer sa compréhension de la situation et son plan d'action. Comme il est mentionné à la rubrique 2.8.5, le plan d'action choisi par le commandant était fondé sur ce qui suit :
sa conviction que le pilote automatique était en mode VOR/LOC avec interception de l'alignement de piste;
l'angle d'interception apparent affiché au HSI;
les barres directrices du directeur de vol sollicitant les ailes à l'horizontale;
des expériences antérieures d'atterrissage réussi à la suite d'une approche aux instruments;
l'attente d'acquérir des références visuelles;
le fait qu'une remise des gaz est habituellement amorcée au point d'approche interrompue.
Le plan d'action souhaité par le P/O, soit une remise des gaz, était fondé sur ce qui suit :
le déplacement de la barre d'écart de route vers une déviation complète;
l'augmentation de la déviation par rapport à la trajectoire malgré l'angle d'interception apparent affiché au HSI;
les indications du GPS;
l'approche non stabilisée;
le danger que présentait le relief.
Comme c'était le cas plus tôt, le commandant ne comprenait probablement pas pleinement que son plan de poursuivre l'approche et d'atterrir n'était plus viable. Le commandant a répondu au P/O plusieurs secondes après que le P/O eut fini de parler, indiquant que le commandant avait vraisemblablement pris le temps d'évaluer la déclaration de « 3 milles » du P/O. Le commandant n'a probablement pas pris en considération une remise des gaz, mais il s'en est encore remis par défaut à son plan d'atterrir à CYRB. Sa priorité était alors la configuration de l'avion, et le problème de navigation est vraisemblablement devenu moins prioritaire.
La déclaration inefficace du P/O et la mauvaise interprétation du commandant sont des indications de la dégradation de la conscience commune de la situation des pilotes. Le commandant avait vraisemblablement comme modèle mental qu'il était possible de corriger l'approche et l'atterrissage, et le P/O avait presque certainement comme modèle mental que la sécurité du vol était sérieusement menacée et qu'une remise des gaz était requise. Ces modèles mentaux divergents ont compromis la capacité des pilotes de communiquer et de travailler ensemble de façon efficace pour remédier à la situation, qui se détériorait progressivement.
Dans sa déclaration, le P/O n'a pas mentionné explicitement une approche non stabilisée, et cette déclaration ne comportait pas de commande ou de directive de remise des gaz. Par conséquent, le commandant n'a pas interprété la déclaration « We're 3 mile final; we're not configged » comme une directive d'amorcer une remise des gaz, mais l'a plutôt interprétée comme un avis qu'il fallait accélérer la configuration de l'avion en vue de l'atterrissage. Le commandant a poursuivi l'approche et a demandé des mesures supplémentaires pour configurer l'avion.
2.8.7 Configuration finale en vue de l'atterrissage
À 16 h 40 min 45,9 s, le commandant a demandé au P/O régler les volets à la position 25 (figure 18), ce qu'a fait le P/O. Les SOP stipulent que le P/O doit confirmer que les volets ont été réglés à la position demandée et, plus tard, que les volets ont atteint cette position. Cependant, le P/O n'a fait ni l'une ni l'autre de ces annonces relativement au réglage des volets à la position 25.
Figure 18. Tracé de l'approche finale selon les données consignées dans le FDR [en anglais seulement]
À 16 h 40 min 49,1 s, le P/O a avisé le commandant que le GPS indiquait aussi une déviation complète et qu'il fallait virer à gauche. Il s'agit là d'une autre tentative de modifier le plan d'action du commandant, et cette tentative suggère que le P/O avait momentanément cessé d'essayer de convaincre le commandant d'amorcer une remise des gaz, et qu'il essayait plutôt de ramener l'avion sur l'alignement de piste afin d'éliminer les risques présentés par le relief.
À 16 h 40 min 54,3 s, le commandant a répondu qu'il ne pouvait pas virer à gauche. Le cap indiqué à ce moment était de 330°, ce qui donnait un angle d'interception apparent de 17° pour retrouver l'alignement de piste. Étant donné que le vol n'était qu'à 3 milles de la piste, le commandant était vraisemblablement réticent à virer davantage à gauche et à accroître l'angle d'interception, ce qui aurait possiblement entraîné un dépassement de l'alignement de piste vers la gauche si l'angle d'interception apparent avait été correct. En outre, en mode d'interception d'AUTO APP, son directeur de vol sollicitait probablement les ailes à l'horizontale pour maintenir le cap sélectionné en fonction du curseur de cap.
Au cours de la période de 16 h 40 min 56 s à 16 h 41 min 8 s, le P/O a fait plusieurs déclarations au sujet de la position de l'avion et du mode de l'avionique. Le commandant a demandé de régler les volets à la position 30 et a aussi accusé réception des déclarations du P/O, mais il n'a pris aucune mesure conséquente. Les SOP stipulent que le P/O doit confirmer que les volets ont été réglés à la position demandée et, plus tard, que les volets ont atteint cette position. Cependant, le P/O n'a fait nu l'une ni l'autre de ces annonces relativement au réglage des volets à la position 30. À 16 h 41 min 8,3 s, le P/O a commencé à faire une suggestion, et le commandant l'a interrompu avec une demande de volets à la position 40.
Cette discussion s'est déroulée rapidement et en même temps que la configuration de l'avion, ce qui n'a pas aidé à résoudre les problèmes de navigation ou d'avionique. Le commandant a interrompu la déclaration du P/O en demandant les volets à la position 30 et à la position 40, créant ainsi entre eux une dynamique d'empressement à terminer la configuration, malgré les préoccupations du P/O. La déclaration du P/O devait vraisemblablement être une autre suggestion d'effectuer une remise des gaz, mais il n'a pas pu la terminer en raison de l'interruption.
Les 2 derniers éléments de la liste de vérifications avant l'atterrissage exigent que le PNF et le PF vérifient les indications relatives au train d'atterrissage et aux volets. À 16 h 41 min 10,1 s, le P/O a déclaré que le train était sorti et que les 3 voyants étaient verts, comme l'indique la liste de vérifications, mais il n'a pas mentionné la position des volets. Le commandant a répondu en confirmant les volets à la position 40 et 1 voyant vert, mais il n'a pas vérifié la position du train d'atterrissage. Après la prise et la vérification de toutes les mesures, le PNF doit annoncer au PF que la liste de vérifications avant l'atterrissage est terminée, mais le P/O ne l'a pas fait. Même si le P/O n'a pas annoncé la fin de la liste de vérifications avant l'atterrissage, l'avion était configuré en vue de l'atterrissage.
Le P/O a omis de faire 5 des annonces requises pendant les derniers changements de configuration. Cette omission était caractéristique de l'abandon de certaines des tâches habituelles du PNF lorsque la charge de travail était très lourde afin de permettre l'exécution d'autres tâches liées à la configuration de l'avion, à la surveillance de la position de l'avion et à la tentative de convaincre le commandant de remettre les gaz. Le P/O avait trop de tâches à exécuter. En raison de cette saturation des tâches, le P/O disposait de moins de temps et d'habileté cognitive pour élaborer et mettre en œuvre une stratégie de communication afin d'amener le commandant à changer son plan d'action.
Comme expliqué ci-dessus, la poussée avait été réduite au ralenti à 16 h 40 min 36 s, vraisemblablement parce que le commandant devait réduire sa vitesse de 178 KIAS pour modifier davantage la configuration. Pendant que les volets ont été sortis aux positions 25, 30 et 40, l'angle de tangage est demeuré à 2° en cabré. À mesure que la traînée augmentait, la vitesse a diminué à 136 KIAS à 16 h 41 min 11 s, une baisse de 42 nœuds en 35 secondes. À 16 h 41 min 5 s, la poussée a commencé à augmenter à partir du ralenti, pour atteindre un rapport de pression moteur (EPR) de 1,5 à 16 h 41 min 12 s. Cette augmentation était vraisemblablement le résultat de la réponse du commandant à la réduction de la vitesse. En même temps, le taux de descente a diminué d'approximativement 700 pieds par minute (pi/min) à environ 150 pi/min, et l'avion a cessé de suivre l'alignement de descente pour se retrouver à plus de 2 points d'écart au-dessus de cet alignement.
À 16 h 40 min 54,3 s, entre ses demandes de réglage des volets à la position 25 et à la position 30, le commandant a déclaré qu'il ne pouvait pas virer à gauche. À ce moment, il concentrait vraisemblablement davantage son attention sur la configuration de l'avion et la régulation de la vitesse que sur les autres paramètres. Comme l'indiquent le changement du taux de descente et la courbe de l'avion au-dessus de l'alignement de descente, son attention sur le pilotage de l'approche ILS a été détournée de façon négative. Cette situation indique clairement que le commandant souffrait d'un rétrécissement attentionnel.
Le commandant avait maintenu le même cap à partir du moment où l'avion est sorti du virage, à 16 h 39 min 5 s, jusqu'à 16 h 40 min 54 s (1 minute et 50 secondes). Durant cette période, l'avion est passé de 7,9 à 2,3 milles du seuil et s'écartait progressivement de l'alignement de piste jusqu'à la déviation complète au HSI.
Le commandant disposait d'information indiquant que l'angle d'interception apparent ne fonctionnait pas. Cependant, un préjugé de confirmation peut avoir réduit sa capacité de percevoir cette information ou de l'intégrer dans son modèle mental.
Durant cette période, le commandant était occupé à effectuer plusieurs tâches simultanées. Il devait diriger la configuration finale de l'avion en vue de l'atterrissage, réduire et stabiliser la vitesse, régler le problème d'alignement de piste et regagner l'alignement de descente. Il devait aussi faire des annonces particulières pour vérifier si la configuration était appropriée. Le commandant a omis au moins 1 annonce requise, et il avait de la difficulté à intégrer les commandes pour corriger simultanément de multiples paramètres. Cette difficulté est révélatrice d'une saturation des tâches.
En raison du rétrécissement attentionnel et de la saturation des tâches, le commandant ne disposait probablement pas d'une vue d'ensemble de la situation. Ce manquement a compromis sa capacité à cerner et à gérer le risque.
2.8.8 Phase finale de l'approche
De 16 h 41 min 5 s jusqu'au moment de l'impact, les données du FDR indiquent de nombreuses manœuvres du volant de commande à mesure que l'avion piquait du nez. Ces manœuvres du volant de commande correspondaient au déplacement involontaire d'un côté à l'autre du volant par le commandant lorsqu'il ramenait le manche vers l'avant pour effectuer des corrections afin de suivre l'alignement de descente. Au cours de cette période, il y a eu de petits mouvements de roulis et changements de cap qui correspondaient aux manœuvres du volant. Il est peu probable que les changements de cap aient eu un effet sensible sur les barres directrices du directeur de vol, qui a vraisemblablement continué de solliciter les ailes à l'horizontale.
À 16 h 41 min 16 s, quelques secondes après avoir atteint la configuration d'atterrissage finale, l'avion se trouvait approximativement à 4100 pieds à la droite de l'axe d'alignement de piste, à 1,5 nm du seuil de la piste 35T. Le HSI aurait indiqué une déviation complète à droite par rapport à l'alignement de piste et une déviation complète au-dessus de l'alignement de descente. La vitesse s'était stabilisée à 136 KIAS, et la poussée des moteurs était d'environ 1,5 EPR. L'altitude était de 940 pieds asl (720 pieds au-dessus de l'altitude de l'aéroport). L'avion était maintenant près de l'altitude à laquelle le commandant s'attendait probablement à percer la base des nuages et à acquérir des références visuelles avec le relief.
À 16 h 41 min 16 s, le commandant a déclaré qu'il était déjà arrivé quelque chose de semblable à un autre pilote, et il a une fois de plus indiqué qu'il continuait l'approche. Il se peut que le commandant ait mal compris le récit de l'événement antérieur, ou qu'il ne se soit pas rappelé tout à fait de l'incident, au cours duquel l'équipage avait effectué une remise des gaz et réglé le problème de compas et de navigation à une altitude sécuritaire. Ce commentaire du commandant n'a pas contribué à régler le problème dans le poste de pilotage ou à dissiper les préoccupations du P/O au sujet du plan d'action du commandant.
La déclaration du commandant indique qu'il/ était vraisemblablement conscient, dans une certaine mesure, de l'existence d'un problème avec le cap indiqué et les indications des instruments de navigation. Malgré cela, il a continué l'approche, possiblement parce qu'il s'attendait à acquérir bientôt des références visuelles avec le relief, comme dans le cas de l'incident 1 (rubrique 1.17.3.3.2).
L'assiette en tangage de l'avion est demeurée relativement stable (2° en cabré) de 16 h 40 min 10 s à 16 h 41 min 18 s, à part quelques excursions mineures lorsque la poussée diminuait et que l'on configurait l'avion (figure 18). Ces excursions vont de pair avec le mode de tangage du pilote automatique à OFF, le tangage manuel de CWS et le pilote automatique maintenant la dernière assiette en tangage réglée par le commandant (rubrique 2.3).
À 16 h 41 min 18 s, l'avion a commencé à piquer du nez, atteignant une assiette en tangage de −2° à 16 h 41 min 32 s. Le commandant avait vraisemblablement remarqué que le taux de descente était devenu constant et que l'avion avait dévié au-dessus de l'alignement de descente, et a exercé sur le manche une pression vers l'avant supérieure à la faible force de surpassement. Une fois que la pression exercée sur le manche a diminué sous la faible force de surpassement, le pilote automatique a maintenu la nouvelle assiette en tangage de −2°.
De 16 h 41 min 19 s, approximativement, jusqu'à 16 h 41 min 27 s, les données du FDR indiquent que le taux de descente a augmenté d'environ 100 pi/min à 700 pi/min. Le changement de tangage en piqué et l'augmentation du taux de descente indiquent que le commandant avait changé ses priorités, délaissant la configuration de l'appareil et la réduction de la vitesse pour se concentrer sur l'alignement de descente et pour effectuer des manœuvres visant à intercepter de nouveau l'alignement de descente.
À 16 h 41 min 26,3 s, le commandant a fait une déclaration au sujet de l'alignement de descente. Le P/O a accusé réception et indiqué qu'il y avait déviation complète. Les données radar et du FDR indiquent qu'à ce moment, l'avion se trouvait à 880 pieds asl et qu'il était bien au-dessus de l'alignement de descente et loin à la droite de l'alignement de piste. Parce que la position de l'avion était à ce point à la droite de l'alignement de piste et si près du radiophare d'alignement de descente, il se peut que les indications d'alignement de descente dans le poste de pilotage ne fussent pas fiables.
À 16 h 41 min 30,8 s, le P/O a transmis un message radio VHF à la tour de CYRB afin de se rapporter à 3 milles en finale. À ce moment, l'avion se trouvait à 0,9 nm du seuil de la piste. Le fait que cet appel à la tour a été remis à plus tard est un autre indicateur de la lourde charge de travail et de la saturation des tâches du P/O.
À 16 h 41 min 33 s, la tour a répondu avec des renseignements sur le vent et l'autorisation d'atterrir, et à 16 h 41 min 39 s, le P/O a répondu. À 16 h 41 min 41,1 s, le P/O a déclaré que l'avion était juste au-dessus du rivage. À ce moment, l'avion survolait la rive nord d'un étang à environ 0,7 nm au sud-est de la piste 35T. Vraisemblablement, le P/O avait mal identifié cet élément visuel et croyait qu'il s'agissait de la côte longeant la mer. La déclaration du P/O indique qu'il a probablement eu un bref contact visuel du relief, ce qui aurait eu pour effet de renforcer l'attente du commandant comme quoi il allait acquérir des références visuelles.
Les données du FDR indiquent que le taux de descente avait augmenté à 1000 pi/min à 16 h 41 min 40 s, et que la vitesse augmentait à 152 KIAS. À 16 h 41 min 43 s, pendant que l'avion piquait davantage du nez jusqu'à −5°, le P/O a proféré un juron. Il s'agissait presque certainement d'une expression de sa profonde inquiétude à l'égard de la position et de l'état de l'avion.
Le taux de descente a ensuite augmenté davantage à 1500 pi/min à 16 h 41 min 46 s, la vitesse atteignant 158 KIAS. L'altitude était de 530 pieds asl (310 pieds au-dessus de l'altitude de l'aéroport). L'avion était par le travers du seuil de la piste 35T et à 4400 pieds à la droite de l'axe d'alignement de piste (figure 19). À ce moment, le P/O a appelé le commandant par son prénom et a une fois de plus exprimé son inquiétude à l'égard de la situation. Il s'agissait d'un changement d'approche du P/O : il ne tentait plus de fournir de l'information sur la performance et la position de l'avion, mais lançait plutôt un appel personnel au commandant en l'appelant par son prénom, et ce, afin d'attirer son attention et de le sortir de sa fixation sur l'alignement de descente et l'atterrissage.
La fixation du commandant sur l'alignement de descente n'est qu'une preuve de plus qu'il avait perdu la vue d'ensemble de la situation, et qu'il ne percevait ni ne comprenait pas les conséquences de continuer l'approche.
À 16 h 41 min 47,7 s, le GPWS a émis une alerte sonore de vitesse verticale de descente. Cette alerte fournit de l'information indépendante et définitive au sujet d'un risque imminent, et elle a amené le P/O à demander au commandant d'amorcer une remise des gaz, en déclarant premièrement « Go for it » [traduction : allons-y], une phraséologie non standard, puis l'expression normalisée « go-around » [traduction : remise des gaz].
À 16 h 41 min 49,2 s, le GPWS a émis une alarme sonore « minimums…minimums », et à 16 h 41 min 51,2 s, le commandant a annoncé « Go-around thrust » [traduction : poussée de remise des gaz]. Les données du FDR indiquent que l'avion a cabré jusqu'à +5° et l'EPR a augmenté à environ 1,9, indiquant que le commandant avait amorcé une remise des gaz.
L'équipage a amorcé une remise des gaz après l'émission de l'alerte de vitesse verticale de descente du GPWS, mais l'altitude n'était pas suffisante et le temps manquait pour exécuter la manœuvre et éviter la collision avec le relief.
2.9 Absence de transfert des commandes durant l'approche finale
La règle des deux appels énoncée dans le FOMFootnote 163 de l'entreprise autorisait le P/O à prendre les commandes de l'avion et à le piloter pour retrouver une situation sécuritaire si le pilote aux commandes (PF) venait à être frappé d'incapacité manifeste ou subtile. Le commandant du vol FAB6560 répondait verbalement aux commentaires et aux suggestions du P/O, et il agissait sur les commandes. Par conséquent, l'incapacité du commandant n'était pas manifeste. Cependant, sa persistance à suivre son plan d'action malgré les avertissements verbaux du P/O indique qu'il était frappé d'incapacité subtile, vraisemblablement due au stress provoqué par la détérioration des paramètres d'approche et la charge de travail connexe.
Le P/O n'a vraisemblablement pas reconnu l'incapacité subtile dans le comportement du commandant. Si le P/O a pris en considération la règle des deux appels, il a probablement conclu que le commandant n'était pas frappé d'incapacité et que la règle ne s'appliquait pas.
Le fait que la règle des deux appels n'a pas été appliquée par le P/O met en évidence une lacune dans cette règle, du fait qu'elle dépend du jugement du PNF pour déterminer s'il est en présence d'incapacité subtile. La reconnaissance de l'incapacité subtile peut prendre beaucoup de temps, et il se peut qu'on ne la reconnaisse pas du tout. Hormis la règle des deux appels, aucune directive n'était fournie pour composer avec une situation dans laquelle le PF répond, mais ne change pas un plan d'action dangereux. Cette situation posait un problème unique pour le P/O du vol FAB6560; c'est-à-dire, jusqu'où devait-il permettre à l'avion de dévier avant de prendre les commandes du commandant?
Par le passé, des incidents et des accidents sont survenus dans lesquels le P/O était le PNF et a signalé une situation qui se détériorait, mais où il n'a pas pris les commandes lorsque le commandant continuait un plan d'action dangereux (rubrique 1.17.8.5). Dans tous ces cas, l'entreprise disposait d'une certaine forme de règle des deux appels, mais le moyen de défense a échoué parce que le P/O n'est pas intervenu et n'a pas pris les commandes de l'avion. Parmi les raisons vraisemblables de cet échec, notons la difficulté de déterminer l'incapacité subtile, l'ambiguïté dans la formulation de la procédure et la réticence des P/O à prendre la mesure drastique de saisir les commandes.
Au moment de l'accident de First Air, il n'y avait pas de formation ou de directive au sein de l'entreprise sur la façon dont un P/O peut exprimer une préoccupation avec plus d'assertivité, au point de pouvoir ordonner une remise des gaz ou un transfert des commandes. En l'absence de politiques et de procédures comme le modèle PACE (probing, alerting, challenging et emergency warning), permettant au P/O d'exprimer sa préoccupation avec plus d'assertivité et lui donnant l'autorité de prendre les commandes de l'avion à la place du commandant, le P/O était limité à un rôle consultatif. Le P/O était clairement conscient du risque croissant. L'approche s'était poursuivie, malgré 2 moments où une remise des gaz était requise : en présence d'une déviation complète par rapport à l'alignement de piste, et en présence d'une approche non stabilisée à une altitude inférieure à 1000 pieds. À ces 2 moments, le P/O a essayé de communiquer au commandant la nécessité de remettre les gaz. Même si elles n'ont pas été exprimées de façon aussi définitive et claire qu'elles auraient pu l'être, ces tentatives sont des indications que le P/O poursuivait ses efforts pour changer le plan d'action du commandant.
Le P/O avait déjà volé pour l'entreprise à titre de commandant sur un autre type d'avion. Cependant, il était novice aux commandes d'un B737, et même si la situation à l'égard de la navigation le rendait de toute évidence mal à l'aise, il s'en est remis au commandant.
Il n'existait pas de politique autorisant expressément un P/O à exercer un rôle plus prépondérant, passant de la consultation à la prise des commandes, et le P/O en l'occurrence était probablement réticent à le faire. Le P/O a essayé à plusieurs prises de communiquer ses préoccupations et de suggérer une remise des gaz, mais n'a pas pris les commandes de l'avion du commandant.
Cet accident et les 3 autres événements cités (rubrique 1.17.8.5) indiquent que lorsque les P/O ne prennent pas les commandes dans des situations qui se détériorent, les conséquences peuvent parfois être catastrophiques au sein de la flotte d'avions de transport à l'échelle mondiale. Sans politiques et procédures autorisant clairement une intervention de plus en plus assertive jusqu'à la prise des commandes de l'avion, certains P/O peuvent être réticents à le faire.
2.10 Adaptations et procédures d'utilisation normalisées de B737 de First Air
2.10.1 Adaptations
Comme il est mentionné à la rubrique 1.17.2, on a compté de nombreux exemples de dérogations de l'équipage du vol FAB6560 par rapport aux politiques d'exploitation et aux SOP de l'entreprise. Des entrevues réalisées avec d'autres pilotes de B737 basés à CYZF ont révélé que certaines des dérogations ne se limitaient pas à l'équipage du vol FAB6560. Ces écarts par rapport aux politiques et aux procédures étaient des adaptations utilisées par les pilotes pour retirer un certain avantage perçu. Avec le temps, les adaptations sont devenues la norme quant à la façon dont les pilotes exploitaient les avions. Certaines des adaptations étaient mineures; cependant, d'autres étaient plus susceptibles d'avoir une incidence sur la sécurité des vols. Par exemple :
On utilisait à l'occasion des signaux manuels ou une tape sur le volant de commande pour signaler le transfert des commandes.
Les exposés d'approche étaient couramment abrégés lorsqu'on connaissait bien les membres de l'équipage ou que les conditions météorologiques étaient bonnes.
On faisait les annonces d'altitude en utilisant une phraséologie non standard, parfois au moyen de signaux manuels lorsqu'on utilisait les radios.
Le GPS ou le FMS (système de gestion de vol) étaient parfois utilisés pour effectuer la transition du vol en route à l'approche finale ILS.
Les pilotes savaient quand ils devaient faire l'objet de surveillance directe selon les méthodes de l'entreprise dont il est question à la rubrique 1.17.4. Ils pouvaient ainsi changer leur comportement durant ces périodes de surveillance. En outre, au moment de l'accident, l'entreprise n'avait pas de méthode de surveillance indirecte, comme un programme fonctionnel de suivi des données de vol (FDM) ou d'audit de sécurité en service de ligne (LOSA). Par conséquent, il est peu probable que l'entreprise fut en mesure de détecter la présence ou l'emploi continu d'adaptations.
Les activités de supervision de First Air n'ont pas permis de détecter les adaptations aux SOP employées par les équipages de B737 à CYZF, y compris l'équipage du vol FAB6560. Comme il est mentionné dans des rubriques précédentes de la présente analyse, les conséquences des adaptations durant le vol FAB6560 étaient une mauvaise communication entre les membres de l'équipage, un accroissement de la charge de travail jusqu'à la saturation des tâches et une dégradation de la conscience commune de la situation.
2.10.2 Transition à l'approche au moyen du système d'atterrissage aux instruments
Comme il est mentionné à la rubrique 2.2, une interprétation possible du plan du commandant du vol FAB6560 pour faire la transition de la phase en route à l'approche était une méthode non standard faisant appel au GPS pour aligner l'avion sur l'alignement de piste en approche finale. Par conséquent, l'enquête a étudié la question de l'existence d'une telle adaptation.
Des entrevues avec des pilotes ont révélé que certains pilotes de B737 de First Air utilisaient le GPS pour effectuer le virage afin de se placer en approche finale ILS, et passaient à la VHF NAV une fois qu'ils suivaient la trajectoire en rapprochement. Selon la direction de l'entreprise, cette pratique est inacceptable, et certains pilotes interrogés décourageaient le recours à cette méthode.
Les pilotes qui n'utilisaient pas cette méthode passaient à la VHF NAV à des distances variant de 1 à 10 milles avant d'atteindre MUSAT.
L'AOM stipule que les éléments sous la ligne pointillée de la liste de vérifications en approche doivent être exécutés après le réglage des NAVAID et des directeurs de vol, selon l'exposé, pour l'approche prévue. Par conséquent, la liste de vérifications ne peut pas être terminée avant le réglage du sélecteur de navigation (sélection NAV/GPS au MD-41). Cette exigence se rapporte à l'ordre d'exécution des tâches plutôt qu'à la position de l'avion par rapport à la trajectoire d'approche finale.
Le fait d'effectuer le passage à la VHF NAV à différentes distances et l'utilisation d'une méthode non standard sont toutes deux des adaptations. Un facteur qui a vraisemblablement contribué à l'élaboration de ces adaptations était l'absence d'information quant à l'endroit où les vérifications en approche devaient être terminées par rapport à la trajectoire d'approche finale.
Un risque inhérent au fait de retarder le passage à la VHF NAV est que les vérifications avant l'atterrissage pourraient parfois commencer avant que ne soient terminées les vérifications en approche. Cette séquence introduit la possibilité d'omettre certains éléments de la liste de vérifications puisqu'ils ne sont pas exécutés dans l'ordre prévu. En outre, selon la position et le cap de l'avion au moment de la sélection de NAV au MD-41, il est possible que le pilote automatique ne suive pas l'alignement de piste parce que le passage a été effectué trop tard et en dehors des critères de capture.
Si les SOP ne comprennent pas de directive particulière indiquant où et comment doit se faire la transition de la navigation en route à la navigation en approche finale, les pilotes adopteront des pratiques non standard qui pourraient constituer un danger pour la sécurité de l'approche.
2.11 Gestion des ressources en équipe du vol FAB6560
2.11.1 Généralités
Comme il est mentionné à la rubrique 1.17.7.1, la gestion des ressources en équipe (CRM) constitue l'utilisation efficace de toutes les ressources humaines et matérielles, ainsi que des sources d'information mises à la disposition de l'équipage de conduite pour assurer la sécurité et l'efficacité des opérations aériennes. Les SOP sont une source d'information importante à la disposition des pilotes, et elles fournissent la phraséologie normalisée et la structure des communications pour maintenir la conscience commune de la situation. De plus, elles proposent des solutions établies à différents problèmes, et aident à gestion de la charge de travail et à la prise de décisions.
2.11.2 Conscience commune de la situation
Dans le cas présent, il y avait des lacunes à la fois dans les mesures discrètes (exposé d'approche, annonces d'altitude et annonces de vitesse incomplets) et dans les mesures continues (annonces de changements d'état de l'avion et des modes de directeur de vol et de pilote automatique) exigées des membres de l'équipage afin d'établir et de maintenir une conscience commune de la situation. Par conséquent, il y a eu dégradation de leur capacité d'interpréter l'information disponible, de résoudre les problèmes et de prendre des mesures conjointement. Au moment où ils passaient du suivi des procédures établies à un comportement de résolution de problèmes, leur charge de travail a augmenté, et les différences entre leur conscience individuelle de l'état de l'avion et des menaces à la sécurité du vol posaient un problème supplémentaire à surmonter.
Il s'est produit une dégradation de la conscience commune de la situation durant le vol, comme l'indiquent les constatations suivantes :
des points de vue différents à l'égard du risque lié à la trajectoire et à l'approche non stabilisée de l'avion;
des modèles mentaux différents quant à la position et à la trajectoire de l'avion :
le commandant avait l'intention de continuer l'approche jusqu'à l'atterrissage;
le P/O était conscient du danger présenté par le relief et essayait de convaincre le commandant de remettre les gaz;
le manque de mesures correctives de la part du commandant en réponse aux suggestions de remise des gaz du P/O et de ses avis au sujet de l'écart par rapport à la trajectoire et de l'approche non stabilisée.
Les comportements suivants des membres de l'équipage ont nui au maintien d'une conscience commune de la situation :
Le commandant a donné un exposé d'approche abrégé, réduisant la probabilité que les pilotes aient la même compréhension de la situation et qu'ils travaillent ensemble de façon efficace.
Les pilotes n'étaient pas tenus de faire des annonces de changement de mode des systèmes, et ils ne l'ont pas fait. Les renseignements dans ces annonces sont essentiels au maintien de la conscience individuelle et commune de la situation.
Chaque pilote était concentré sur un aspect différent du système de navigation que chacun d'eux croyait fermement être celui qui fournissait l'information la plus fiable sur la situation réelle. Le P/O était concentré sur l'alignement de piste et les indications de divergence de trajectoire du GPS, et le commandant était concentré sur l'angle d'interception apparent.
La phraséologie normalisée pour les appels et les réponses vise à établir une compréhension commune et à donner des résultats conditionnés familiers. Le P/O a employé une phraséologie qui n'était pas normalisée relativement à la déviation complète de l'alignement de piste, et il ne disposait pas de phraséologie normalisée pour avertir le commandant de l'approche non stabilisée.
Les réponses du commandant aux déclarations du P/O au sujet de la déviation complète de l'alignement de piste étaient non standard. De telles réponses marquaient une progression du langage non standard employé par le P/O. On s'éloignait alors davantage des SOP pour atteindre un niveau d'interaction entre les membres de l'équipage où il serait difficile de maintenir des attentes communes et des interventions coordonnées.
Le langage non standard employé par le P/O pour suggérer une remise des gaz réduisait la probabilité qu'il réussisse à communiquer clairement son intention au commandant et constituait un obstacle à la prise de mesures coordonnées.
La charge de travail de l'équipage a augmenté pendant que les pilotes essayaient de comprendre et de résoudre les disparités dans leurs modèles mentaux individuels. Cette charge de travail a augmenté une fois de plus lorsqu'ils s'empressaient de configurer l'avion en vue de l'atterrissage. Cette augmentation de la charge de travail a réduit leur capacité de résoudre le problème complexe de navigation et de concilier leurs points de vue disparates à son égard.
Tant le contenu que la nature de la communication entre les membres d'équipage montraient clairement des signes de dégradation de la conscience commune de la situation. Le fait que ni l'un ni l'autre des membres de l'équipage n'a mentionné à l'autre cette dégradation constituait un problème supplémentaire qu'il fallait régler. Cependant, plutôt que de mentionner expressément la dégradation de la conscience commune de la situation, chacun des pilotes a continué à mettre l'accent sur sa propre compréhension de la situation afin d'essayer de convaincre l'autre de sa véracité.
Ni l'un ni l'autre des pilotes n'avait délaissé la situation. Certaines des déclarations du commandant indiquent qu'il était perplexe quant au mode du pilote automatique et à la raison pour laquelle l'avion dérivait par rapport à l'alignement de piste. De même, certaines des déclarations du P/O indiquent clairement que la position et la trajectoire de l'avion le rendaient mal à l'aise. Cependant, ni le commandant ni le P/O n'ont pu atténuer de façon efficace la confusion ou l'inconfort de l'autre, et la dégradation de la conscience commune de la situation n'a pas été résolue avant le retentissement d'un avertissement indépendant, soit l'alerte de vitesse verticale de descente du GPWS.
L'équipage n'a pas maintenu une conscience commune de la situation. La dégradation de cet aspect de la coordination de l'équipage était évidente tout au long de l'approche.
Des entrevues avec des pilotes ont révélé que d'autres pilotes avaient également recours à des adaptations aux SOP. Les adaptations aux SOP peuvent nuire à la conscience commune de la situation et à l'efficacité de la CRM.
2.11.3 Communications
Les pratiques exemplaires en matière de CRM visent à permettre aux membres d'un équipage de se sentir à l'aise de fournir des renseignements pour aider à la prise de décisions. On encourage généralement les membres d'équipage à s'affirmer lorsqu'ils ne sont pas certains de quelque chose ou qu'ils ont des raisons de douter du bien-fondé du plan d'action suivi. Il est essentiel d'utiliser un langage clair dans des situations où chaque seconde compte. Cependant, certaines personnes peuvent éprouver beaucoup de difficulté à utiliser ce type de langage, et le manque d'assertivité a été un facteur dans d'autres accidents.
Dans le cas du vol FAB6560, un grand nombre des communications entre les pilotes étaient inefficaces parce qu'ils n'ont pas utilisé un langage clair et sans équivoque. Par exemple :
Le commandant a fait une déclaration indiquant qu'il utiliserait la RNAV pour se rendre jusqu'au radiophare d'alignement de piste. Ce message pouvait être interprété de plus d'une façon.
L'avertissement du P/O quant au fait que l'avion avait atteint la déviation complète par rapport à l'alignement de piste a été formulé de façon interrogative, ne comportait pas de proposition de mesure corrective et n'a pas suscité la réponse appropriée afin d'amorcer une remise des gaz. Le commandant a répondu à son tour par une question au lieu d'une mesure corrective.
La suggestion du P/O, à 16 h 40 min 30 s, qu'ils effectuent une remise des gaz et qu'ils discutent ensuite de l'anomalie n'a pas suscité la réponse voulue d'amorcer une remise des gaz. Plutôt, le commandant a continué l'approche.
Le P/O a déclaré que l'avion se trouvait à 3 milles et n'était pas configuré. Il est presque certain que le message qu'il voulait transmettre était que l'approche était non stabilisée et qu'une remise des gaz s'imposait. Cependant, le commandant a plutôt compris qu'il fallait finir de configurer l'avion en vue de l'atterrissage.
Lorsque l'avion a atteint la déviation complète de l'alignement de piste, le P/O a demandé des précisions au moyen d'une question exploratoire sur la position de l'avion. Il a alerté le commandant à maintes reprises au sujet de la déviation progressive par rapport à l'alignement de piste, en plus de signaler la présence du relief à la droite de la piste. Même si le P/O n'a pas fait de demande claire précisant les conséquences de la poursuite de l'approche, il a suggéré un autre plan d'action. Cependant, les communications du P/O n'ont pas réussi à convaincre le commandant de changer son plan d'action.
Les stratégies de communication progressive peuvent être difficiles à adopter. Le modèle PACE (probing, alerting, challenging et emergency warning) procure aux pilotes une stratégie de communication visant à établir une assertivité progressive naturelle, selon les circonstances du moment. Les déclarations exploratoires et d'avertissement du P/O ainsi que sa suggestion d'un autre plan d'action correspondaient aux premières parties du modèle PACE. Cependant, le P/O n'a jamais poussé l'assertivité au point d'intervenir d'urgence en prenant les commandes de l'avion.
Les communications entre les 2 pilotes étaient inefficaces. Le commandant avait trop de tâches à exécuter et était vraisemblablement influencé par la tendance à s'en tenir au plan. Malgré les efforts de communication du P/O, les préoccupations à l'égard de la trajectoire du vol FAB6560 ne faisaient pas partie du processus décisionnel du commandant.
2.11.4 Gestion de la charge de travail
Les pratiques exemplaires en matière de CRM visent à permettre aux membres d'un équipage de gérer la charge de travail de façon efficace. La charge de travail dépend du nombre de tâches à accomplir dans une certaine période de temps et de la capacité d'une personne à répondre à ces demandes. Une augmentation des tâches ou une diminution du temps disponible donnent lieu à une charge de travail accrue. Pour réduire la charge de travail, il faut soit diminuer le nombre de tâches, soit augmenter le temps disponible pour les accomplir.
La charge de travail de l'équipage du vol FAB6560 a commencé à s'alourdir lorsque le vol a effectué le virage à MUSAT pour se placer en approche finale. La charge de travail de l'équipage s'est alourdie davantage à mesure que l'approche se poursuivait. Comme l'indique l'abandon de certaines tâches en approche finale, les 2 pilotes en sont venus à un état de saturation des tâches. La charge de travail de plus en plus lourde mobilisait les ressources mentales de l'équipage et diminuait sa capacité de reconnaître la charge de travail excessive et de prendre des mesures correctives.
Rien n'indiquait que l'un ou l'autre des pilotes se rendait compte de l'alourdissement de sa charge de travail. Même si le P/O a suggéré une remise des gaz à plusieurs reprises, ces suggestions découlaient de la déviation complète de l'alignement de piste et de l'approche non stabilisée plutôt que de la charge de travail. L'équipage n'a pas essayé d'utiliser d'autres moyens pour augmenter le temps disponible pour exécuter les tâches nécessaires. Les pilotes n'ont pas géré la charge de travail de façon efficace.
2.11.5 Résolution de problèmes et prise de décisions
La résolution de problèmes est un processus à étapes multiples dont la prise de décision fait partie intégrante. Une prise de décision efficace suppose que l'on cerne avec précision la situation dans laquelle on se trouve et les répercussions de celle-ci, que l'on élabore un plan et que l'on mette en œuvre la meilleure façon de procéder. Les pilotes doivent réévaluer continuellement leur situation afin de déterminer s'ils l'ont correctement perçue et si le plan donne les résultats escomptés ou s'il faut le modifier.
Pendant le vol FAB6560, l'équipage a été confronté à plusieurs problèmes :
La descente a été amorcée tardivement, et l'avion se trouvait à environ 600 pieds au-dessus de l'alignement de descente lorsque le virage a été effectué pour se placer en approche finale.
Le vol a dévié de l'alignement de piste, atteignant finalement une déviation complète. Cette déviation a donné lieu à une longue discussion qui a détourné l'attention de l'équipage de la configuration de l'avion en vue de l'atterrissage.
L'approche était non stabilisée, ce qui a réduit le temps disponible pour exécuter les tâches et augmenté par conséquent la charge de travail des 2 pilotes.
Les pilotes avaient des modèles mentaux divergents. Cette divergence a compromis la communication entre eux.
Durant la descente de l'altitude de croisière, le commandant s'est rendu compte que l'avion était au-dessus du profil de descente nominal, et il a augmenté le taux de descente dans une tentative de regagner le profil. Cependant, cette stratégie a échoué et a donné lieu à une vitesse excessive sous 10 000 pieds et à une altitude de 600 pieds au-dessus du profil au moment du virage pour se placer en approche finale. Ce résultat indique que le commandant n'avait pas modifié son plan initial.
L'équipage s'est rendu compte que l'avion dérivait vers la droite de l'alignement de piste et a consacré beaucoup de temps à en discuter. Le P/O a avisé le commandant de l'écart de trajectoire à maintes reprises, mais n'a pas suggéré de mesure corrective. Lorsque le P/O a finalement suggéré une remise des gaz, à 16 h 40 min 30 s, le commandant a immédiatement rejeté sa proposition. Ce rejet indique que le commandant n'avait pas compris les conséquences de la situation. Par conséquent, le commandant n'a vraisemblablement pas senti le besoin de réévaluer ou de modifier son plan de continuer l'approche jusqu'à l'atterrissage.
Le P/O s'est rendu compte que l'approche était non stabilisée et, à 16 h 40 min 41 s, il a déclaré que l'avion se trouvait à 3 milles et n'était pas configuré en vue de l'atterrissage. Cependant, la déclaration ne mentionnait pas clairement que l'approche n'était pas stabilisée et ne proposait pas de mesure corrective. Par conséquent, le commandant a mal compris la déclaration, et sa mesure corrective était de configurer l'avion en vue de l'atterrissage. La réaction du commandant suggère qu'il ne s'était pas rendu compte que l'approche était non stabilisée; par conséquent, il n'a vraisemblablement pas senti le besoin de réévaluer ou de modifier son plan de continuer l'approche jusqu'à l'atterrissage.
Comme il a été mentionné précédemment, le modèle mental du P/O reposait sur la nécessité de remettre les gaz, tandis que le commandant avait comme modèle mental la possibilité de corriger l'approche et d'atterrir. Ces modèles mentaux divergents ont compromis leur capacité de communiquer; par conséquent, le commandant n'a pas compris ou mis en œuvre les suggestions du P/O de réévaluer le plan d'action.
L'équipage n'a pas résolu de façon efficace les problèmes rencontrés durant la descente et l'approche finale.
Dans l'événement en cause, le P/O jouait un rôle consultatif, donnant au commandant des renseignements sur l'état de l'avion et suggérant d'autres mesures à adopter. Cependant, les communications du P/O manquaient d'assertivité et étaient ambiguës. En outre, la charge de travail de plus en plus lourde du commandant avait réduit sa capacité de percevoir et de comprendre l'information fournie par le P/O. Le rétrécissement attentionnel, le préjugé de confirmation et la tendance à s'en tenir au plan ont également eu une incidence négative sur le les capacités du commandant. Le commandant a eu plusieurs occasions de réévaluer et de modifier son plan, mais il ne l'a pas fait. La prise de décisions du commandant était inefficace.
2.11.6 Résumé de la gestion des ressources en équipe du vol FAB6560
La conscience commune de la situation, la communication, la gestion de la charge de travail, la résolution de problèmes et la prise de décisions font toutes partie intégrante de la CRM. Comme il a été mentionné précédemment, l'équipage du vol FAB6560 n'a employé aucune de ces pratiques avec succès. Par conséquent, leur CRM était inefficace.
2.12 Formation en gestion des ressources en équipe à First Air
2.12.1 Formation initiale en gestion des ressources en équipe
La formation initiale en CRM décrite dans le First Air Flight Operations Training Manual (FOTM) satisfait aux exigences de la Norme de service aérien commercial (NSAC) 725.124(39), et elle est dispensée par 2 instructeurs motivés qui croient en l'importance de la formation en CRM. Cependant, First Air n'y attribue pas 2 jours, comme le veut Transports Canada (TC). Afin de satisfaire à d'autres exigences de formation, le cours initial de CRM de First Air a été réduit à moins de 1 journée. En raison de ces contraintes temporelles, les instructeurs n'étaient pas en mesure d'enseigner tous les sujets requis précisés à la fois dans le FOTM et la NSAC 725.124(39) pour la formation initiale. En outre, ils utilisaient la trousse de formation en CRM de TC, qui ne comprend pas les plus récents concepts et méthodes de formation en CRM.
En conséquence, les participants au cours n'ont pas reçu de formation sur les stratégies de communication progressive des préoccupations, les stratégies de résolution de problèmes et de prise de décisions, ainsi que les stratégies sur les meilleures façons de faire concorder les modèles mentaux de tous les membres d'un équipage. De plus, les participants n'ont pas reçu de conseils pour les aider à gérer la charge de travail dans le poste de pilotage.
Le commandant du vol FAB6560 avait reçu la formation initiale en CRM en 1997, et le P/O l'avait reçue en 2007. On n'a trouvé aucun renseignement concernant le contenu et la durée de ces formations. La formation initiale du commandant en 1997 n'a eu lieu que 6 mois après l'entrée en vigueur des exigences réglementaires en matière de formation. Le matériel de formation en CRM utilisé par First Air a été produit par TC environ au même moment. Par conséquent, le contenu de la formation initiale en CRM suivie par le commandant et le P/O était probablement semblable à celui du cours observé par le BST.
Les lacunes relevées dans le cours initial de CRM de First Air sont des aspects de la CRM qui ont joué un rôle dans l'accident, comme nous l'avons expliqué ci-dessus. La formation initiale en CRM de First Air n'a pas fourni à l'équipage du vol en question suffisamment de stratégies pratiques pour faciliter la prise de décisions, la résolution de problèmes, la communication et la gestion de la charge de travail.
2.12.2 Formation périodique en gestion des ressources en équipe
Les exigences réglementaires ne précisent pas les sujets liés à la CRM qui doivent être abordés durant la formation périodique, et aucune exigence ne fait mention de la nécessité de réviser les sujets abordés lors de la formation initiale en CRM. Cependant, la formation périodique de l'entreprise portait sur les attitudes, la communication et la prise de décisions. D'après ce qui est enseigné lors de la formation périodique, les SOP constituent un moyen de cerner les erreurs et une source de phraséologie normalisée destinée à éliminer les mauvaises communications et à réduire les malentendus. Ces objectifs liés aux SOP sont une pierre angulaire de la CRM. Cependant, les pilotes de B737 basés à CYZF avaient recours à des adaptations aux SOP, indiquant une sous-estimation de l'importance des SOP.
Contrairement au contenu du cours initial de CRM, une partie de la matière abordée dans le cadre du cours périodique de CRM comportait des éléments de la formation en CRM moderne, comme des discussions portant sur les concepts de gestion des menaces et des erreurs. Le contenu de la formation périodique en CRM de First Air satisfaisait aux exigences précisées dans le FOTM de l'entreprise et la NSAC 725.124(39)b).
La NSAC 725.124(39)b) ne précise pas la durée de la formation périodique. Depuis au moins 2006, l'entreprise a accordé 4 heures pour couvrir la matière de cette formation. La durée de la formation périodique observée par le BST satisfaisait aux exigences à cet égard précisées dans le FOTM.
Après avoir suivi la formation initiale en CRM, le commandant de bord et le P/O du vol FAB6560 avaient reçu une formation périodique annuelle; la dernière formation périodique du commandant avait eu lieu 9 mois avant l'accident, et celle du P/O, 5 mois avant l'accident. Cependant, pendant le vol qui a mené à l'accident, ni l'un ni l'autre des pilotes n'a mis en application de façon efficace les concepts de CRM abordés dans la formation périodique de l'entreprise.
La formation périodique annuelle en CRM reçue par les pilotes en cause n'a pas renforcé de façon adéquate leur connaissance des concepts de CRM ou leur capacité à mettre ces concepts en application au cours des opérations réelles.
2.13 Réglementation en matière de gestion des ressources en équipe au Canada
La réglementation actuelle exige que les exploitants régis par la sous-partie 705 du Règlement de l'aviation canadien (RAC) donnent de la formation en CRM, mais la réglementation, n'ayant pas suivi les progrès de la théorie et de l'application de la CRM, est maintenant désuète.
Transports Canada (TC) a pris des mesures pour résoudre un grand nombre des problèmes dans le règlement en vigueur relevés antérieurement par le Bureau de la sécurité des transports (BST). Cependant, aucune des modifications proposées n'a encore été ajoutée au règlement. La réglementation et la norme en vigueur pour la formation en CRM à l'intention des exploitants régis par la sous-partie 705 du RAC n'ont pas été mises à jour en fonction des progrès dans le domaine de la formation en CRM. En conséquence, il existe un risque que les équipages de conduite ne reçoivent pas de formation sur les plus récentes pratiques reconnues mondialement en matière de techniques de gestion des menaces et des erreurs.
De plus, la réglementation en matière de formation en CRM en vigueur ne précise pas de durée minimale pour la formation initiale et périodique en CRM. Par conséquent, les exploitants sont libres de déterminer la durée consacrée à la formation en CRM. Pourvu que les exploitants puissent démontrer que leur formation en CRM satisfait aux exigences désuètes de la NSAC 725.124(39), leur cours de CRM peut être d'aussi courte durée qu'ils le jugent approprié.
Les exploitants aériens sont tenus de fournir de nombreuses catégories de formation des équipages de conduite. Cependant, des contraintes temporelles et financières peuvent pousser ces exploitants à raccourcir des séances de formation comme celle sur la CRM. Le cours initial de CRM de First Air auquel ont assisté les enquêteurs du BST a duré un peu plus de 4 heures, plutôt que les 2 jours prévus par TC. Il n'est pas raisonnable de s'attendre à ce que la totalité de la trousse de formation en CRM de TC soit enseignée de façon efficace en si peu de temps. Si on n'accorde pas suffisamment de temps à la formation initiale en CRM, il est peu probable que les membres des équipages de conduite développent des compétences essentielles suffisantes en CRM.
La NSAC 725.124(39)b) ne fournit aucune directive claire aux exploitants en ce qui concerne les exigences minimales en matière de formation périodique en CRM. Plus particulièrement, rien ne les oblige à revoir les principaux sujets liés à la CRM décrits dans la NSAC 725.124(39)a). Du point de vue de la formation, ce manque de renforcement des compétences fondamentales enseignées dans le cadre de la formation initiale en CRM pourrait susciter le retour de comportements appris antérieurement. Sans renforcement adéquat des compétences fondamentales en CRM dans le cadre de la formation périodique en CRM, il existe un risque accru que les équipages de conduite éprouvent de la difficulté à employer une CRM efficace dans le poste de pilotage.
Pour obtenir l'approbation de son programme de CRM, un exploitant doit démontrer que ce programme satisfait aux exigences décrites dans la NSAC 725.124(39). Selon la pratique courante, l'exploitant doit soumettre son plan de formation en CRM, souvent comme partie intégrante du manuel d'exploitation de la compagnie, aux bureaux régionaux de TC aux fins d'approbation. Le bureau régional de TC compare ensuite le plan de formation à la norme pour déterminer si tous les éléments requis s'y trouvent.
TC avait approuvé le plan de formation en CRM de First Air. Cependant, rien n'indique que TC a déjà assisté à l'un des cours de formation initiale en CRM de First Air. Par conséquent, l'entreprise n'a pas reçu de rétroaction de l'organisme de réglementation sur la qualité de sa formation initiale en CRM ou sur la conformité aux exigences réglementaires du cours, tel qu'il est enseigné.
2.14 Accréditation des instructeurs de gestion des ressources en équipe
L'animation est une compétence spécialisée qui doit être développée. Si les personnes choisies pour enseigner la CRM ne possèdent pas les compétences nécessaires en animation, elles peuvent éprouver de la difficulté à orienter efficacement les participants afin qu'ils assimilent le matériel de formation. Une animation inefficace pourrait entraîner une faible rétention des compétences enseignées dans le cadre du cours.
Au Canada, rien n'oblige les animateurs ou les instructeurs de CRM à suivre un cours de formation officiel ou à obtenir une accréditation quelconque. Par conséquent, aucun des instructeurs qui donnent de la formation en CRM au Canada n'est tenu par la réglementation de démontrer qu'il possède un niveau minimum d'expérience ou de qualification en formation. Les membres d'équipage régis par la sous-partie 705 du RAC qui sont tenus de suivre la formation en CRM se comptent par milliers, et un grand nombre d'exploitants régis par les sous-parties 703 et 704 du RAC donnent de la formation en CRM de façon volontaire à d'autres membres d'équipage. Aucun des principaux instructeurs de CRM de l'entreprise n'avait suivi de formation officielle d'animateur ou d'instructeur ou ne possédait d'accréditation en enseignement de la CRM. L'absence d'exigence en matière d'accréditation des instructeurs augmente le risque que les équipages de conduite ne reçoivent pas une formation efficace en CRM.
La Civil Aviation Authority (CAA) du Royaume-Uni a reconnu l'importance d'avoir des instructeurs de CRM qualifiés et a mis en place un processus d'accréditation en CRM exhaustif afin de s'assurer que les équipages de conduite reçoivent la meilleure formation possible en CRM.
2.15 Processus de signalement interne du système de gestion de la sécurité de First Air
Le système de gestion de la sécurité (SGS) de First Air offre aux plusieurs méthodes de signalement des problèmes de sécurité. Cependant, les pilotes de First Air n'ont pas signalé à la direction les 2 incidents antérieurs mettant en cause des difficultés de navigation avec des B737 durant des approches selon les règles de vol aux instruments (IFR). L'absence de rapports sur les incidents 1 et 2 constitue pour l'organisation des occasions manquées de tirer des leçons et de cerner des problèmes de sécurité possibles. Le fait que la remise des gaz survenue au cours de l'incident 2 (événement à signalement obligatoire) n'ait pas été signalée indique que les systèmes de signalement de l'entreprise n'étaient pas entièrement efficaces.
Il est peu probable que les situations dangereuses qui ne sont pas signalées soient relevées ou fassent l'objet d'une enquête; par conséquent, on ne peut pas prendre de mesures correctives pour atténuer le risque connexe.
2.16 Fonctionnement du système d'atterrissage aux instruments de CYRB
Il n'y a eu aucune interférence avec le fonctionnement normal du système d'atterrissage aux instruments (ILS) de la piste 35T à CYRB.
2.17 Scénario relatif au VOR
Après le virage en rapprochement à MUSAT, la trajectoire du vol FAB6560 semble suivre une trajectoire directe vers le VOR YRB. Cependant, on peut conclure avec certitude que l'équipage ne naviguait pas à l'aide du VOR ou ne suivait pas intentionnellement une trajectoire en direction du VOR. Les renseignements suivants étayent cette conclusion :
Ni l'un ni l'autre des pilotes n'a mentionné le VOR YRB en aucun temps au cours de la période enregistrée par l'enregistreur de conversations de poste de pilotage (CVR).
À 16 h 15 min 24,1 s, le commandant a clairement exposé son intention de se rendre à l'alignement de piste en suivant une approche aux instruments par navigation de surface (RNAV).
À 16 h 17 min 11,9 s, le commandant a fait un exposé sur l'approche ILS de la piste 35T.
Le CVR a enregistré l'indicatif en code Morse d'IRB toutes les 32,3 secondes après 16 h 17 min °,5 s, indiquant qu'au moins 1 des récepteurs de VHF NAV était certainement réglé sur la fréquence de l'équipement de mesure de distance (DME) connexe à l'ILS de la piste 35T.
La discussion entre les pilotes durant l'approche finale comprenait des allusions répétées à la déviation vers la droite par rapport à l'alignement de piste et à la trajectoire GPS indiquée au plan de vol.
L'analyse en laboratoire des unités de contrôle de VHF NAV no 1 et no 2 indique clairement que les 2 étaient réglées sur la fréquence ILS d'IRB de 110,30 mégahertz (MHz).
L'analyse en laboratoire du sélecteur de transfert de VHF NAV indique qu'il était vraisemblablement à la position NORMAL avant l'impact. Par conséquent, le récepteur de VHF NAV no 3 aurait été vraisemblablement en mode de secours, non commandé.
Les 2 systèmes GPS étaient programmés pour l'approche RNAV de la piste 35T avec les points de cheminement MUSAT, OTNEL et RW35. Le point de cheminement actif était OTNEL. Le VOR YRB n'était pas inclus dans le plan de vol de l'un ou l'autre des GPS.
2.18 Directives en matière de maintenance des enregistreurs de données de vol
Comme l'indique cet événement, les directives du document ED-55 relatives à la maintenance des enregistreurs de données de vol (FDR) n'étaient pas suffisantes pour assurer l'état de fonctionnement des FDR, plus particulièrement en raison du petit échantillon de données (15 minutes) utilisé pour les vérifications de la corrélation. Il existe probablement d'autres systèmes de FDR qui ne sont pas en état de fonctionnement installés sur des aéronefs exploités au Canada.
Les directives de maintenance des FDR (Appendice C de la Norme 625 du RAC) de Transports Canada (TC) ne font pas référence à la spécification actuelle de l'Organisation européenne pour l'équipement électronique de l'aviation civile (EUROCAE) concernant les enregistreurs de bord et, par conséquent, ne suffisent pas à assurer l'état de fonctionnement des FDR. Cette déficience accroît le risque que l'information nécessaire pour déterminer et communiquer les lacunes en matière de sécurité ne soit pas disponible.
2.19 Dispositifs d'avertissement d'impact
L'avion était équipé d'un dispositif avertisseur de proximité du sol (GPWS) de plus ancienne génération, qui fournissait seulement une alerte sonore et un voyant lorsque l'avion était à l'intérieur des limites des paramètres de proximité du dispositif. Le dispositif utilisait l'information du radioaltimètre pour déterminer la proximité du relief sous l'avion et, par conséquent, il n'a pas fourni d'avertissement relatif au relief ascendant qui approchait devant l'avion.
Un système d'avertissement et d'alarme d'impact (TAWS) fournit à la fois un avertissement sonore et l'affichage d'une carte du relief devant l'avion. Non seulement la carte présente-t-elle à l'équipage de l'information concernant l'altitude du relief le long de la trajectoire de vol, mais elle lui fournit aussi une conscience supplémentaire de la situation quant à la position de l'aéronef par rapport aux obstacles et à la trajectoire de vol prévue. Des améliorations apportées aux sources d'information utilisées pour calculer et prédire la proximité du sol ont donné lieu à une signalisation plus rapide des dangers et à une augmentation du temps disponible pour que les équipages puissent réagir. Les nouvelles modifications à la réglementation exigeant que les aéronefs commerciaux comportant 6 sièges passagers ou plus soient équipés d'un TAWS devraient atténuer de façon importante le risque d'accident d'impact sans perte de contrôle (CFIT).
Dans le présent cas, si l'avion avait été équipé d'un TAWS, cela aurait amélioré la conscience de la situation de l'équipage et lui aurait donné plus de temps pour réagir à un avertissement de proximité du sol.
2.20 Possibilités de survie
Les possibilités de survie à l'événement étaient liées à l'ampleur des dommages subis par les systèmes de retenue des occupants. Les occupants dont les sièges se sont séparés du fuselage plus tôt pendant la séquence de désintégration ont subi les blessures les plus graves, caractéristiques d'un contact dur avec le sol. Les occupants dont les sièges sont demeurés généralement intacts, en position verticale et partiellement attachés à la partie gauche du plancher de la cabine, tout au long de la séquence d'écrasement ou presque, ont en général subi des blessures moins graves, caractéristiques d'un contact moins dur avec des surfaces pouvant causer des blessures. Tous les survivants appartenaient à ce dernier groupe.
2.21 Système de NOTAM
De nombreux NOTAM (avis aux aviateurs) ont été publiés pour changer la période pendant laquelle la région de contrôle terminal militaire (MTCA) était en vigueur. Le contenu de ces NOTAM était le même, à l'exception de la dernière ligne, qui indiquait les groupes date-heure révisés. Dans certains cas, la seule modification du contenu des NOTAM était 3 caractères numériques de la dernière ligne d'un message codé de 14 lignes.
Un nouveau NOTAM porte la désignation NOTAMN et fournit de nouveaux renseignements aux utilisateurs de l'espace aérien. En conséquence, il est vraisemblablement susceptible de susciter l'attention des utilisateurs. Le premier NOTAMR (NOTAM de remplacement) est également susceptible de susciter l'attention des utilisateurs. Un deuxième NOTAMR, même si le chiffre du NOTAM suivant la lettre R est différent, peut n'être examiné que sommairement, parce que le pilote a peut-être déjà vu la désignation R. Le pilote peut par conséquent conclure qu'il s'agit du même message qu'il a lu précédemment, surtout étant donné qu'il n'y a aucun moyen de mettre en évidence les modifications subtiles.
Les NOTAM publiés sur le site Web de la météorologie à l'aviation (AWWS) ne comportent pas les désignations R, C ou N et, par conséquent, doivent tous être traités comme de nouveaux NOTAM. Cependant, en parcourant initialement un nouveau NOTAM au sujet de l'espace aérien de l'opération NANOOK, le lecteur peut penser qu'il s'agit du même message que le précédent, parce que le texte est identique à l'exception de quelques chiffres au bas indiquant une modification de la date d'entrée en vigueur.
La publication d'un si grand nombre de NOTAM presque identiques en prévision d'une vérification en vol réussie, sans assurance qu'une vérification en vol aurait lieu ou qu'elle pourrait être effectuée, peut avoir créé de la confusion chez les équipages et le contrôleur du centre de contrôle régional (ACC) d'Edmonton de NAV CANADA quant au statut de l'espace aérien.
Les équipages des vols FAB6560 et KBA909, ainsi que le contrôleur de l'ACC d'Edmonton responsable du vol FAB6560, s'attendaient tous à ce que la MTCA soit en vigueur et que des services de contrôle soient fournis. Les NOTAM publiés concernant l'établissement de la MTCA n'ont pas réussi à communiquer aux utilisateurs de l'espace aérien l'information dont ils avaient besoin.
2.22 Contrôle de la circulation aérienne à CYRB
À moins d'indication contraire, toutes les références aux services de la circulation aérienne à CYRB renvoient à de l'équipement et à du personnel militaires.
Le message d'observation météorologique régulière pour l'aviation (METAR) de 16 h pour CYRB était le plus récent dont disposaient les contrôleurs et les pilotes. Même si le contrôleur terminal de CYRB n'a pas fourni de renseignements sur l'atterrissage lors du contact initial avec le vol FAB6560, l'équipage de conduite avait déjà le METAR de 16 h pour CYRB. Par conséquent, le fait que le contrôleur terminal de CYRB n'a pas fourni ces renseignements n'a pas nui au modèle mental de l'équipage et n'a pas contribué à l'accident. Les responsabilités du contrôleur tour de CYRB ne comprenaient pas la communication de renseignements sur le plafond et la visibilité; le cas échéant, les renseignements à la disposition du contrôleur n'auraient pas été plus récents que ceux dont disposait déjà l'équipage.
Le contrôleur tour ne disposait pas de données radar, et les conditions météorologiques empêchaient de déterminer visuellement la position du vol FAB6560. Par conséquent, le contrôleur tour n'avait pas les renseignements requis pour déterminer si un avertissement sur la position était nécessaire.
Même si le radar n'avait pas fait l'objet d'une vérification en vol, il était opérationnel au moment de l'arrivée du vol FAB6560, et les données radar étaient affichées à la fois au radar de surveillance de zone (ASR) et au radar d'approche de précision (PAR) dans la remorque abritant le terminal. Le radar ne pouvait pas servir à fournir des services de contrôle parce qu'il n'avait pas fait l'objet d'une vérification en vol; ainsi, le contrôleur terminal ne fournissait pas de services de contrôle et ne surveillait pas activement les affichages radar. Par conséquent, le contrôleur terminal n'était pas conscient de la proximité du vol FAB6560 avec le relief.
Ni le contrôleur tour ni le contrôleur terminal ne disposaient de suffisamment de renseignements valides pour les inciter à transmettre un avis de position au vol FAB6560.
On a choisi un espace aérien de classe D à la fois pour la MTCA et la zone de contrôle de CYRB pour s'assurer que tous les aéronefs à l'intérieur de l'espace aérien reçoivent un service de contrôle positif. Lorsqu'il n'était pas possible d'utiliser le radar, les forces armées ont déterminé qu'elles ne pouvaient pas fournir de services à l'intérieur de la MTCA, et ont à maintes reprises retardé son établissement. La zone de contrôle, cependant, était en vigueur, mais on n'a pas considéré la nécessité de fournir un service de règles de vol aux instruments (IFR) non radar, ce qu'exigeait toutefois la sélection d'une zone de contrôle de classe D.
À l'intérieur d'une zone de contrôle, un contrôleur IFR dans l'unité de contrôle IFR connexe fournirait normalement les services de contrôle IFR. Cependant, la MTCA de CYRB n'était pas en vigueur; par conséquent, l'espace aérien entourant la zone de contrôle était un espace non contrôlé de classe G. Sans la MTCA ou un prolongement de la région de contrôle, l'espace aérien n'était pas suffisant pour fournir aux aéronefs à l'arrivée ou au départ des services de contrôle IFR à l'intérieur de la zone de contrôle. Parce que la MTCA n'était pas en vigueur, aucune norme d'espacement ou autorisation d'approche n'a été fournie aux vols FAB6560 et KBA909. Cette situation a entraîné une perte d'espacement IFR entre les vols FAB6560 et KBA909 lorsque le vol KBA909 a pénétré dans la zone de contrôle de classe D à 16 h 40 min 55 s.
La tour de contrôle de CYRB n'a pas fait de déclaration officielle d'une phase d'alerte. Cependant, certains organismes qui sont normalement avisés qu'un avion est dans la phase d'alerte de recherche et sauvetage ont été informés de l'avion manquant lors de la recherche du vol FAB6560 par des moyens de communication. Le centre conjoint de coordination de sauvetage (JRCC) de Trenton a finalement été avisé de la situation par le centre de contrôle régional (ACC) d'Edmonton de NAV CANADA. Le retard de la notification du JRCC n'a pas retardé l'intervention d'urgence sur les lieux, puisque les ressources du poste d'incendie étaient déjà en état d'alerte et avaient été dépêchées immédiatement sur les lieux de l'écrasement lorsqu'ils sont devenus visibles.
2.23 Maintenance de l'aéronef
2.23.1 Consignes de navigabilité
Puisque la CN 2004-19-10 et la CN 2006-12-23 n'ont pas été entièrement exécutées, le certificat de navigabilité de C-GNWN n'était pas en vigueur au moment de l'accident.
Aucune anomalie liée à la maîtrise de l'avion n'avait été consignée dans les carnets de bord de l'avion, et rien dans les données de l'enregistreur de données de vol n'indique que l'équipage avait éprouvé des problèmes de maîtrise de l'avion.
On a donc conclu que la non-conformité avec ces 2 CN n'a pas contribué à l'accident.
2.23.2 Radiobalise de repérage d'urgence
L'interrupteur de la radiobalise de repérage d'urgence (ELT) installée sur l'avion était en position OFF. Cependant, même s'il avait été en position ON, il est peu probable que le signal émis eût été suffisamment fort pour en permettre la détection, puisque le câble de l'antenne a été sectionné au moment de l'impact. Par conséquent, on a conclu que la position de l'interrupteur de l'ELT n'a pas retardé les opérations de sauvetage pour cet accident.
L'information d'identification programmée dans le module d'interface de l'avion (clé électronique) provenait de l'aéronef sur lequel l'ELT était installée précédemment. Puisque l'ELT était incapable d'émettre de signal, le fait que l'information d'identification était incorrecte n'a pas été un facteur.
2.24 Suivi des données de vol
L'analyse proactive et non punitive de données dépersonnalisées générées en cours de vol peut aider à déterminer et à atténuer les risques liés à l'exploitation de l'entreprise. Cette analyse procure un moyen de surveiller le comportement des pilotes en plus des outils d'évaluation officiels, comme les vols d'entraînement et de vérification des compétences. Les transporteurs aériens qui n'ont pas recours à une certaine forme de suivi des données de vol ont une connaissance inadéquate des risques présents au sein de l'entreprise. Cette lacune peut nuire à la capacité d'un transporteur aérien à déterminer et à atténuer les risques. Si les transporteurs aériens ne surveillent pas les données de vol en vue de déceler et de corriger les problèmes existants, les adaptations aux procédures d'utilisation normalisées risquent de ne pas être détectées.
Même si First Air a un programme de suivi des données de vol (FDM), ce programme passait à un nouveau fournisseur de services au moment de l'accident, et les données n'ont pas fait l'objet d'une analyse. Cette lacune a privé l'entreprise d'une occasion de détecter des adaptations aux SOP, comme la poursuite d'un atterrissage après une approche non stabilisée.
2.25 Conditions météorologiques
La dernière observation météorologique pour CYRB transmise à l'équipage était le METAR de 16 h, obtenu à 16 h 09. L'observation météorologique subséquente enregistrée était un message d'observation météorologique spéciale d'aérodrome (SPECI) émis à 16 h 49. L'équipage du vol FAB6560 disposait de l'information la plus récente.
La visibilité à CYRB a diminué de 10 milles à 16 h à 5 milles à 16 h 49. Cette diminution de visibilité n'aurait pas déclenché l'émission d'un SPECI. Le plafond à CYRB a baissé de 700 à 300 pieds au cours de cette même période. Cependant, aucune information n'était disponible quant au moment où s'est produit ce changement.
À 16 h 41 min 41 s, le P/O a déclaré qu'il voyait le rivage. Cette déclaration signifie que le P/O a pu brièvement voir la surface, et cela indique que la base des nuages était vraisemblablement déchiquetée. L'aéroport CYRB se trouve à une altitude de 222 pieds au-dessus du niveau de la mer (asl), et l'épave était à une altitude d'environ 400 pieds asl. Le feu et la fumée émanant de la partie centrale du fuselage et des ailes n'étaient pas visibles de l'aéroport, et ce, du moment de l'écrasement jusqu'à 17 h 19. Ce fait indique que la base des nuages dans ce secteur du ciel était inférieure à 200 pieds au-dessus de l'aéroport. Cependant, en raison du manque d'information sur la base des nuages dans d'autres secteurs du ciel, on ne peut pas tirer de conclusion quant au plafond nuageux à l'aéroport au moment de l'accident.
Sept minutes après l'accident, le SPECI de 16 h 49 pour CYRB signalait un plafond de 300 pieds agl selon les observations, c'est-à-dire 100 pieds au-dessus des minimums d'approche. En ajoutant la hauteur de ce plafond à l'altitude de 222 pieds de l'aéroport, la base des nuages signalée aurait été de 500 pieds asl, soit environ 100 pieds au-dessus du lieu de l'écrasement. Étant donné que cet endroit n'est pas devenu visible avant 17 h 19, la base des nuages dans les environs de ces collines était à la surface. Le plafond sur les lieux de l'accident était quelque peu différent des conditions observées directement au-dessus de l'aéroport.
La visibilité observée en surface était de 10 milles à 16 h et de 5 milles à 16 h 49. Même si on ne connaît pas la visibilité à l'aéroport au moment de l'accident, elle n'a vraisemblablement jamais diminué en dessous des minimums d'approche au cours de l'arrivée du vol FAB6560.
2.26 Risque lié aux approches non stabilisées
Selon les recherches effectuées, les approches non stabilisées présentent un risque élevé pour la sécurité aérienneFootnote 164. Comme il a été démontré précédemment dans le cadre d'enquêtes du BST et d'autres organismes étrangers, les conséquences négatives comprennent des contacts queue-sol, des sorties en bout de piste et des impacts sans perte de contrôle (CFIT). Même s'il y a certaines mesures de protection en place pour atténuer le risque d'approches non stabilisées, ce ne sont pas tous les exploitants qui les emploient toutes. Dans le cadre de la présente enquête, le Bureau a examiné en détail les mesures de protection à la disposition des transporteurs aériens pour atténuer les risques liés aux approches non stabilisées et à leurs conséquences. Ces mesures de protection, en grande partie administratives, comprennent notamment :
une politique de l'entreprise à l'égard des approches stabilisées, qui comprend une politique de remise des gaz sans égard à la faute;
des critères d'approche stabilisée et des procédures d'utilisation normalisées (SOP) mis en pratique dans les opérations, incluant la phraséologie de l'équipage;
une gestion efficace des ressources en équipe (CRM), incluant l'habilitation des premiers officiers à prendre les commandes dans une situation non sécuritaire;
le recours à des programmes de suivi des données de vol (FDM) pour surveiller la conformité des SOP aux critères d'approche stabilisée;
le recours aux audits de sécurité en service de ligne (LOSA) ou à d'autres moyens, comme les contrôles des compétences et les vérifications en route, pour évaluer les pratiques de CRM et déterminer les adaptations aux SOP employées par les équipages;
des systèmes de signalement non punitif (pour signaler les événements ou les pratiques non sécuritaires);
l'utilisation de systèmes d'avertissement et d'alarme d'impact (TAWS).
Même si First Air avait certaines de ces mesures de protection en place, notamment une politique et des critères en matière d'approche stabilisée, une politique de remise des gaz sans égard à la faute, le signalement d'incidents et de dangers du système de gestion de la sécurité (SGS), la règle des deux appels et un GPWS de plus ancienne génération, ces mesures de protection n'étaient pas suffisamment robustes pour prévenir la poursuite de l'approche non stabilisée ou la collision avec le relief. D'autres enquêtes du BST ont révélé que la non-conformité aux SOP de l'entreprise liées aux approches stabilisées n'est pas unique à First AirFootnote 165.
Les mesures de protection actuelles contre la poursuite des approches non stabilisées se sont révélées moins qu'adéquates. À moins que d'autres mesures ne soient prises pour réduire la fréquence des approches non stabilisées qui se poursuivent jusqu'à l'atterrissage, le risque de CFIT et d'accidents à l'approche et à l'atterrissage persistera.
3.0 Faits établis
3.1 Faits établis quant aux causes et aux facteurs contributifs
L'amorce tardive et la gestion subséquente de la descente ont fait en sorte que l'avion se trouvait à 600 pieds au-dessus de l'alignement de descente lorsque le virage a été effectué en vue de l'approche finale, augmentant ainsi la charge de travail de l'équipage et réduisant sa capacité d'évaluer et de résoudre les problèmes de navigation pendant le reste de l'approche.
Lorsque la référence de cap des systèmes de compas a été réglée durant la descente initiale, une erreur de −8° a été introduite. Pour des raisons indéterminées, une dérive des compas subséquente au cours de l'arrivée et de l'approche a entraîné des erreurs de compas d'au moins −17° en approche finale.
Pendant que l'avion sortait du virage pour se placer en approche finale à la droite de l'alignement de piste, le commandant de bord a vraisemblablement effectué une manœuvre de roulis au volant de commande, forçant le retour du pilote automatique du mode de capture de VOR/LOC au mode MAN et HDG HOLD. L'équipage ne s'est pas rendu compte du changement de mode.
En sortant du virage, l'indicateur de situation horizontale du commandant affichait un cap de 330°, donnant un angle d'interception initial perçu de 17° par rapport à la trajectoire en rapprochement de l'alignement de piste de 347°. Cependant, en raison de l'erreur de compas, le cap vrai de l'avion était de 346°. Avec une dérive due au vent de 3° vers la droite, l'avion s'est éloigné davantage vers la droite de l'alignement de piste.
La charge de travail des membres de l'équipage a augmenté à mesure que ces derniers essayaient de comprendre et de résoudre l'ambiguïté de la divergence de trajectoire, qui ne correspondait ni à l'angle d'interception perçu ni aux résultats prévus.
À l'insu des pilotes, les directeurs de vol sont vraisemblablement retournés au mode d'interception d'AUTO APP au moment où l'avion franchissait 2,5° à la droite de l'alignement de piste, fournissant ainsi des directives de roulis au cap sélectionné (sollicitant les ailes à l'horizontale), plutôt qu'à l'alignement de piste (sollicitant un virage à gauche).
Une divergence des modèles mentaux a réduit la capacité de l'équipage à résoudre les problèmes de navigation. La sollicitation des ailes à l'horizontale au directeur de vol a vraisemblablement rassuré le commandant du fait que l'angle d'interception était suffisant pour ramener l'avion sur la route sélectionnée; cependant, le premier officier a probablement accordé plus de poids aux renseignements sur la position de la barre de route et du GPS.
L'équipage accordait son attention à la résolution du problème de navigation, ce qui a retardé la configuration de l'avion en vue de l'atterrissage. Cette résolution de problèmes était une tâche supplémentaire, qui n'est normalement pas effectuée au cours de cette phase critique du vol et qui n'a fait qu'accroître la charge de travail.
Le premier officier a indiqué au commandant qu'ils avaient atteint une déviation complète par rapport à l'alignement de piste. En l'absence de phraséologie normalisée propre à la situation dans laquelle il se trouvait, le premier officier a dû improviser sa suggestion de remettre les gaz. Même si une déviation complète est un état indésirable de l'aéronef qui exige une remise des gaz, le commandant a poursuivi l'approche.
L'équipage n'a pas maintenu une conscience commune de la situation. À mesure que l'approche s'est poursuivie, les pilotes n'ont pas communiqué efficacement leurs perception, compréhension et prévisions respectives quant à l'état de l'avion.
Malgré la politique de l'entreprise qui exigeait une remise des gaz immédiate en cas d'approche non stabilisée à une altitude de moins de 1000 pieds au-dessus de l'altitude de l'aéroport, aucune remise des gaz n'a été amorcée. Cette politique n'avait pas été rendue opérationnelle au moyen de lignes directrices dans les procédures d'utilisation normalisées.
Le commandant n'a pas interprété la déclaration « 3 mile and not configged » [traduction : à 3 milles; nous ne sommes pas configurés] du premier officier comme un conseil d'amorcer une remise des gaz. Le commandant a poursuivi l'approche et a demandé des mesures supplémentaires pour configurer l'avion.
Le premier officier avait trop de tâches à exécuter; par conséquent, il disposait de moins de temps et d'habileté cognitive pour élaborer et mettre en œuvre une stratégie de communication afin d'amener le commandant à changer son plan d'action.
En raison du rétrécissement attentionnel et de la saturation des tâches, le commandant ne disposait probablement pas d'une vue d'ensemble de la situation. Ce manque de vue d'ensemble a compromis sa capacité à cerner et à gérer le risque.
L'équipage a amorcé une remise des gaz après l'émission de l'alerte de vitesse verticale de descente du dispositif avertisseur de proximité du sol, mais l'altitude n'était pas suffisante et le temps manquait pour exécuter la manœuvre et éviter la collision avec le relief.
Le premier officier a essayé à plusieurs reprises de communiquer ses préoccupations et de suggérer une remise des gaz. Hormis la règle des deux appels, aucune directive n'était fournie pour composer avec une situation dans laquelle le pilote aux commandes répond, mais ne change pas un plan d'action dangereux. En l'absence de politiques ou de procédures claires permettant à un premier officier de passer de la consultation à la prise des commandes, le premier officier était probablement réticent à le faire.
La gestion des ressources en équipe de l'équipage était inefficace. La formation initiale et périodique en gestion des ressources en équipe de First Air n'a pas fourni aux membres de l'équipage suffisamment de stratégies pratiques pour les aider à prendre des décisions, à résoudre des problèmes, à communiquer et à gérer la charge de travail.
Durant le vol FAB6560, des adaptations aux procédures d'utilisation normalisées ont mené à une mauvaise communication entre les membres de l'équipage, à un accroissement de la charge de travail jusqu'à la saturation des tâches et à une dégradation de la conscience commune de la situation. Les activités de supervision de First Air n'ont pas permis de détecter les adaptations aux procédures d'utilisation normalisées employées par les équipages de B737 à Yellowknife.
3.2 Faits établis quant aux risques
Si les procédures d'utilisation normalisées ne comprennent pas de directive particulière indiquant où et comment doit se faire la transition de la navigation en route à la navigation en approche finale, les pilotes adopteront des pratiques non standard qui pourraient constituer un danger pour la sécurité de l'approche.
Les adaptations aux procédures d'utilisation normalisées peuvent nuire à la conscience commune de la situation et à l'efficacité de la gestion des ressources en équipe.
Sans politiques et procédures autorisant clairement une intervention de plus en plus assertive jusqu'à la prise des commandes de l'avion, certains premiers officiers peuvent être réticents à le faire.
Si des situations dangereuses ne sont pas signalées, il est peu probable qu'elles soient relevées ou qu'elles fassent l'objet d'une enquête par le système de gestion de la sécurité d'une entreprise; par conséquent, il se peut que des mesures correctives ne soient pas prises.
Les normes de formation et les documents d'orientation en matière de gestion des ressources en équipe en vigueur de Transports Canada n'ont pas été mis à jour pour tenir compte des progrès dans le domaine de la formation en gestion des ressources en équipe et, au Canada, rien n'oblige les animateurs ou les instructeurs de gestion des ressources en équipe à obtenir une accréditation. Cette situation augmente le risque que les équipages de conduite ne reçoivent pas une formation efficace en gestion des ressources en équipe.
Si la formation initiale en gestion des ressources en équipe ne permet pas de développer des compétences efficaces en la matière, et si le renforcement de ces compétences dans le cadre de la formation périodique n'est pas adéquat, il se peut que les équipages de conduite ne soient pas en mesure de gérer adéquatement les risques dans le poste de pilotage.
Si les exploitants ne prennent pas les mesures nécessaires pour veiller à ce que les équipages de conduite appliquent systématiquement des pratiques efficaces de gestion des ressources en équipe en cours de vol, les risques pour la sécurité aérienne persisteront.
Les directives de maintenance des enregistreurs de données de vol (Appendice C de la Norme 625 du RAC) de Transports Canada ne font pas référence à la spécification actuelle concernant les enregistreurs de bord et, par conséquent, ne suffisent pas à assurer l'état de fonctionnement des enregistreurs de données de vol. Cette déficience accroît le risque que l'information nécessaire pour déterminer et communiquer les lacunes en matière de sécurité ne soit pas disponible.
Si les aéronefs ne sont pas équipés de systèmes d'avertissement et d'alarme d'impact de nouvelle génération, il existe un risque qu'un avertissement n'alerte pas les équipages à temps pour éviter le relief.
Si les transporteurs aériens n'assurent pas le suivi des données de vol en vue de déceler et de corriger les problèmes, les adaptations aux procédures d'utilisation normalisées risquent de ne pas être détectées.
À moins de prendre d'autres mesures pour réduire la fréquence des approches non stabilisées qui se poursuivent jusqu'à l'atterrissage, le risque d'impacts sans perte de contrôle et d'accidents à l'approche et à l'atterrissage persistera.
3.3 Autres faits établis
Les 2 pilotes sont vraisemblablement passés du GPS à la VHF NAV au cours de la dernière partie des vérifications en approche avant le virage à MUSAT.
L'équipage de conduite du vol FAB6560 ne naviguait pas à l'aide du VOR YRB ou ne suivait pas intentionnellement une trajectoire en direction du VOR.
Il n'y a eu aucune interférence avec le fonctionnement normal du système d'atterrissage aux instruments de la piste 35T à CYRB.
Ni le contrôleur tour militaire, ni le contrôleur terminal militaire à CYRB ne disposaient de suffisamment de renseignements valides pour les inciter à transmettre un avis de position au vol FAB6560.
La zone de contrôle de classe D temporaire établie par les forces armées à CYRB était en vigueur sans qu'on puisse fournir l'espacement selon les règles de vol aux instruments.
Le retard de la notification du centre conjoint de coordination de sauvetage n'a pas retardé l'intervention d'urgence sur les lieux de l'écrasement.
Les NOTAM publiés concernant l'établissement de la région de contrôle terminal militaire n'ont pas réussi à communiquer aux utilisateurs de l'espace aérien l'information dont ils avaient besoin.
Il n'a pas été possible de déterminer le plafond nuageux à l'aéroport au moment de l'accident. La visibilité à l'aéroport au moment de l'accident n'a vraisemblablement jamais diminué en dessous des minimums d'approche au cours de l'arrivée du vol FAB6560. La couche de nuages sur les lieux de l'écrasement était en surface à moins de 200 pieds au-dessus de l'altitude de l'aéroport.
4.0 Mesures de sécurité
4.1 Mesures de sécurité prises
4.1.1 Bureau de la sécurité des transports du Canada
Le 26 août 2011, le Bureau de la sécurité des transports (BST) a avisé NAV CANADA d'une divergence concernant un des points cotés illustrés sur les cartes d'approche de CYRB. Le BST a suggéré à NAV CANADA de valider la position et d'apporter les modifications requises, le cas échéant.
Le 8 novembre 2011, des enquêteurs du BST ont présenté aux cadres supérieurs de First Air un exposé portant sur plusieurs problèmes relatifs à la sécurité opérationnelle (décrits ci-dessous) qui ont été relevés dans le cadre des premières étapes de l'enquête.
Procédures d'utilisation normalisées (SOP) − First Air a un volumineux recueil de SOP pour le Boeing 737. Cependant, au cours de l'enquête, plusieurs cas d'adaptations par les équipages et d'incertitude à l'égard des SOP ont été relevés, plus particulièrement :
procédures de résolution des approches non stabilisées (c.-à-d., absence de langage concis);
transition de la trajectoire d'interception du système de positionnement mondial (GPS) au guidage à l'approche ILS finale;
utilisation de compas magnétiques aux endroits où un compas vrai est requis.
Il peut être nécessaire d'examiner la validation des processus de formation et de l'élaboration des SOP.
Conception et utilisation des listes de vérifications – La liste de vérifications en approche est interrompue à la ligne pointillée (c.-à-d., pause naturelle), mais la liste de vérifications avant l'atterrissage doit être amorcée afin de ralentir l'aéronef (train d'atterrissage, volets à la position 15). Cette pratique crée un problème de séquencement pour les équipages, plus particulièrement en ce qui concerne la façon d'effectuer l'interruption et la reprise des éléments de la liste de vérifications. L'entreprise était au courant de ce problème, mais n'avait pas encore pris de mesures correctives.
Gestion des ressources en équipe (CRM) – Il a été souligné que les adaptations aux SOP et le langage lié aux procédures non concis risquent de faire obstacle au maintien d'une bonne communication au sein de l'équipage. On a également souligné le besoin de directives quant à la façon dont un premier officier peut passer d'un rôle de consultation à la prise des commandes lorsqu'il est confronté à une situation qui se détériore.
Système de signalement des incidents – Le système de gestion de la sécurité de First Air comporte un système de signalement non punitif. Les enquêteurs du BST ont été avisés de 2 incidents qui n'avaient pas été signalés à l'entreprise. L'absence de signalement représente des occasions manquées pour l'organisation de tirer des leçons et peut justifier que l'on examine la possibilité d'approfondir la formation dans ce domaine au sein de l'entreprise.
Problème technique – Les vérifications de la corrélation des enregistreurs de données de vol (FDR) effectuées par First Air présentaient un problème de perte de données qui avait existé au cours des dernières années et qui n'avait pas été décelé ou corrigé. Le personnel de la maintenance peut devoir examiner les procédures de validation des données.
Le 19 décembre 2011, le BST a avisé NAV CANADA que les cartes d'approche et la carte d'aérodrome de CYRB indiquaient 4 différentes représentations de la déclinaison magnétique. Un examen restreint du volume 1 (CAP) du Canada Air PilotFootnote 166 a révélé que de nombreux autres emplacements avaient aussi des cartes présentant des déclinaisons magnétiques différentes. Le BST a suggéré que NAV CANADA envisage d'apporter des modifications qui permettraient de représenter de l'information uniforme dans le CAP 1 du Canada Air Pilot et de modifier les processus afin d'assurer l'uniformité future des déclinaisons magnétiques présentées.
Le 8 février 2012, le BST a émis l'Avis de sécurité aérienne A11H0002-D1-A1, Espacement IFR dans l'espace aérien de classe D, au commandant de la 1re Division aérienne du Canada de l'Aviation royale canadienne. L'avis stipulait queFootnote 167 :
Étant donné que l'ATC militaire continuait de gérer la zone de contrôle de classe D sans pouvoir fournir l'espacement IFR dans des conditions météorologiques de vol aux instruments, il existait un risque accru de collision en vol. À moins que les opérations de GECA [gestion expéditionnaire de la circulation aérienne] à venir ne comprennent la prestation de l'ensemble des services de la circulation aérienne nécessaires à la classe d'espace aérien, ce risque sera toujours présent.
Le 12 avril 2012, le BST a envoyé la Lettre d'information sur la sécurité aérienne A11H0002-D2-L1, Directives insuffisantes en matière d'entretien des FDRFootnote 168, à Transports Canada. La lettre indiquait que la norme de maintenance des FDR du Règlement de l'aviation canadien (RAC) ne correspond pas aux spécifications actuelles de l'EUROCAE (Organisation européenne pour l'équipement électronique de l'aviation civile) concernant la maintenance des enregistreurs de bord et, par conséquent, ne suffit pas à assurer l'état de fonctionnement des FDR.
Le 26 avril 2012, des enquêteurs du BST ont présenté un exposé aux cadres supérieurs de First Air au sujet de la formation en CRM de l'entreprise. First Air donne sa formation initiale en CRM dans le cadre de la formation sur type des pilotes nouvellement engagés. Des enquêteurs du BST ont assisté à un cours de formation initiale en CRM de First Air le 3 avril 2012; il s'agissait du premier cours de formation initiale en CRM depuis l'accident. La durée du cours était réduite, et celui-ci n'a pas abordé tous les modules requis aux termes de l'article 705.124 du RAC − Programme de formationFootnote 169 et de la Norme de service aérien commercial (NSAC) 725.124(39) − Formation en gestion des ressources du poste de pilotage (CRM) pour les membres d'équipageFootnote 170. De plus, la matière présentée était désuète et ne comportait pas d'outils et de stratégies pratiques. On a suggéré à l'entreprise de considérer la possibilité de consacrer plus de temps à la formation en CRM et de mettre à jour le contenu du cours.
4.1.2 First Air
4.1.2.1 Vérification de la corrélation des enregistreurs de données de vol
First Air a examiné ses procédures de vérification de la corrélation des FDR et a présenté les résultats aux enquêteurs du BST le 8 décembre 2011. Il a par la suite été déterminé que la vérification de la corrélation des données effectuée par First Air était conforme au RAC. Le problème non détecté de perte de données était lié aux directives insuffisantes en matière de maintenance des enregistreurs de données de vol mentionnées dans la Lettre d'information sur la sécurité aérienne A11H0002-D2-L1 du BST.
4.1.2.2 Réponse aux exposés du Bureau de la sécurité des transports du 8 novembre 2011 et du 26 avril 2012
À la suite de l'exposé du BST du 8 novembre 2011, First Air a inscrit les problèmes de sécurité présentés dans son système de gestion de la sécurité. L'entreprise a évalué les problèmes et a élaboré un plan pour les régler. Le 25 juillet 2012, First Air a communiqué ses mesures correctives au BST. Le 1er août 2013, ces renseignements ont fait l'objet d'une mise à jour pour indiquer l'état des mesures prises. Ces mesures sont décrites ci-dessous.
4.1.2.2.1 Procédures d'utilisation normalisées
First Air a effectué un examen des procédures d'utilisation normalisées (SOP) des B737, B767, ATR42, ATR72 et L382 afin de cerner les adaptations aux SOP. Des lacunes dans les connaissances et les procédures ont été relevées et sont considérées comme des points qui exigent un examen et des améliorations.
Mesures immédiates
Les notes de service sur les opérations aériennes (FOPM) suivantes ont été émises :
La FOPM-11-55 a été publiée pour fournir aux équipages un message exhaustif de la haute direction concernant les opérations aériennes ainsi que des instructions à l'intention des pilotes en chef relatives aux exposés. Les pilotes en chef ont rencontré individuellement tous les membres des équipages de conduite afin de réitérer l'exigence et l'importance de suivre les politiques contenues dans les manuels d'exploitation et les procédures d'utilisation normalisées. Cette directive de la gestion a été instituée afin de veiller à ce que tous les membres d'équipage comprennent leur rôle pour assurer la sécurité de l'exploitation.
FOPM-11-072 − Escalating from an Advisory Role to Taking Control (24 novembre 2011). Les détails de cette directive ont été inclus dans les modifications apportées au manuel d'exploitation comme suit :
Tous les membres d'un équipage peuvent commander une remise des gaz au moyen de l'annonce « Go around ».
Les critères pour établir une approche stabilisée ont été améliorés.
La politique de remise des gaz sans égard à la faute a été renforcée.
À la suite d'un examen des pratiques exemplaires de l'industrie, la règle des deux appels a été renforcée.
À la suite d'un examen des pratiques exemplaires de l'industrie, la politique en matière d'incapacité du pilote a été renforcée.
On a élaboré des annonces et des tolérances normalisées pour l'ensemble des flottes, et elles ont été incorporées aux AOM des flottes.
FOPM-737-12-009 − Final Approach Intercept Procedures (20 janvier 2012). La note clarifie la transition des procédures d'interception par GPS/FMS (système de gestion de vol) à une aide à la navigation au sol. Cette information a depuis été incorporée dans l'AOM.
FOPM-737-12-008 − Autopilot Management During ILS Intercept (20 janvier 2012). La note clarifie l'utilisation du pilote automatique et des directeurs de vol, et a été incorporée dans l'AOM.
FOPM-12-004 − Mag/DG Selection (9 janvier 2012). La note a été publiée à l'intention de tous les membres d'équipage de conduite, soulignant l'importance de respecter les SOP et les politiques dans tous les domaines d'activité de l'entreprise.
En outre, une réunion a été organisée avec tous les pilotes instructeurs de la flotte afin de souligner l'importance de respecter les SOP, de demeurer vigilant à l'égard des adaptations aux SOP en service de ligne et d'éliminer ces adaptations. Cette réunion comprenait aussi des directives de la direction visant à mettre davantage l'accent sur la connaissance des systèmes et l'utilisation efficace du système de commande automatique de vol au cours de vérifications en route subséquentes, des cours de formation et des séances en simulateur.
Mesures en cours
Les pilotes en chef de tous les types d'aéronef se sont réunis pendant plusieurs jours au cours de la deuxième moitié de 2012 pour discuter des annonces et des procédures communes à toutes les flottes. Les SOP pour tous les types d'aéronef ont été réécrites dans un format commun. L'approbation des SOP du B737-200 et du B737-400 a été reçue de Transports Canada (TC) en juin 2013, et ces SOP sont actuellement en vigueur. La présentation des SOP des autres types doit se faire selon un rythme gérable par TC, et elles seront mises en œuvre à l'automne et à l'hiver 2013−2014, aussitôt qu'elles auront été approuvées et distribuées, et que la formation au sujet des différences aura été donnée.
La réécriture complète du Ground Icing Operations Manual était liée à ce projet. Le manuel a été présenté à TC et approuvé le 21 août 2012.
La réécriture du Flight Operations Training Manual a été terminée. Le manuel a été renommé Flight Crew Training Manual, a été soumis à TC et a été approuvé le 19 novembre 2012.
First Air a retenu les services d'experts externes pour fournir une perspective moderne sur les SOP de même que sur leur élaboration et leur utilisation. L'entreprise retenue a fourni de la formation en gestion des risques liés au comportement (c.-à-d., gestion des risques liés au non-respect des SOP) à l'intention du personnel de gestion dans un rôle de leadership. Les connaissances acquises sont actuellement mises en pratique.
4.1.2.2.2 Conception et utilisation des listes de vérifications
L'absence de ligne pointillée dans la liste de vérifications avant l'atterrissage et les chevauchements dans cette liste ont donné lieu à une modification de l'AOM.
4.1.2.2.3 Gestion des ressources en équipe
La formation en gestion des ressources en équipe a été examinée et son contenu a été modernisé. La durée du cours initial a été augmentée à 1 journée complète.
4.1.2.2.4 Système de signalement
On a effectué un examen du système et des exigences de signalement. Dans le cadre de l'examen, il a été déterminé que certaines politiques en vigueur pourraient avoir contribué, dans certains cas, à la lassitude en matière de signalement. Plusieurs politiques en place exigeaient le signalement régulier d'éléments qui faisaient partie de l'exploitation normale, comme un déroutement normal en raison des conditions météorologiques. Compte tenu de la nature complexe de l'environnement d'exploitation, d'autres éléments peuvent ne pas avoir été signalés en raison de la charge de travail et de la complexité de la politique et du formulaire utilisé. Le rapport de sécurité aérienne a été modifié de façon à supprimer les exigences de signalement d'éléments d'exploitation normale. Il a également été simplifié afin de fournir davantage d'occasions de décrire des événements nécessitant une attention particulière. L'avis aux équipages les informant des changements apportés au formulaire de signalement de sécurité aérienne et aux politiques soulignait aussi l'importance du signalement continu des dangers. Ces mesures ont pris fin en octobre 2012.
De plus, le directeur de la sécurité des vols a publié 2 articles dans le bulletin de l'entreprise pour faire la promotion du signalement d'événements dans tous les aspects de l'exploitation aérienne.
4.1.2.2.5 Normes de formation
On a effectué un examen et une révision du cours destiné aux pilotes responsables des vérifications des compétences en route. Ce cours a pour but de s'assurer que tous les membres du personnel de formation et de vérification appliquent une norme commune pour valider la formation et veiller à la compréhension et au respect de toutes les procédures de l'entreprise. Le premier cours a été donné le 24 juillet 2012.
4.1.2.2.6 Formation initiale et périodique
First Air effectue un examen de toute la formation initiale. Un examen de la formation sur simulateur, de l'entraînement en ligne et de la formation périodique suivra. Chacun de ces programmes comprendra des éléments pour renforcer les techniques de gestion des ressources en équipe.
4.1.2.2.7 Maintenance
Les services de maintenance ont lancé un programme visant à déterminer la vitesse de dérive des conservateurs de cap lorsque les aéronefs sont au sol. Si des vitesses de dérive excessives sont détectées, un programme de maintenance amélioré sera mis en place pour assurer une performance acceptable. En plus de ce programme, les équipages de conduite recevront de la rétroaction en vue de les sensibiliser au fonctionnement de ce système et aux rapports requis pour en maintenir la fiabilité.
4.1.2.2.8 Programme de suivi des données de vol
Le programme de suivi des données de vol (FDM) de First Air a fait l'objet d'un examen, et on a retenu les services d'une entreprise de l'extérieur pour apporter une aide et des conseils en ce qui a trait à la détection des adaptations aux SOP et d'autres domaines exigeant une amélioration de la formation. Le directeur du programme produit des rapports trimestriels, qui sont examinés dans le cadre de réunions trimestrielles de gestion sur la sécurité. Cette initiative a fourni des données pour améliorer la formation et l'exploitation courante de tous les types d'aéronef de la flotte de First Air.
4.1.2.3 Retard dans la maintenance relative aux consignes de navigabilité
Après avoir découvert que les consignes de navigabilité CN 2004-19-10 et CN 2006-12-23 n'avaient pas été entièrement exécutées, First Air a lancé une enquête du système de gestion de la sécurité (SGS) afin de déterminer la raison de cette lacune et de vérifier si celle-ci s'appliquait aux autres appareils B737 de sa flotte.
Consigne de navigabilité 2004-19-10
L'enquête de l'entreprise a révélé que les inspections requises par la CN 2004-19-10 des axes d'articulation des pivots du stabilisateur horizontal n'avaient pas été effectuées sur 5 appareils Boeing 737 de sa flotte. Le plan de mesures correctives à court terme a immobilisé au sol les avions en cause jusqu'à ce que l'on ait effectué les inspections requises des axes d'articulation des pivots du stabilisateur horizontal. Ces inspections n'ont révélé aucune anomalie, et les aéronefs ont été remis en service.
Le plan de mesures correctives mis en œuvre dans le cadre du SGS comprenait la prise de dispositions pour qu'un tiers effectue une vérification approfondie de toutes les consignes de navigabilité concernant les aéronefs Boeing 737, ATR (Avions de transport régional) et Lockheed C-130 Hercules de l'entreprise. L'entreprise a créé un nouveau poste, dont la responsabilité principale est d'effectuer un examen distinct et indépendant de toutes les évaluations futures des consignes de navigabilité de l'entreprise. L'entreprise a aussi amorcé l'élaboration d'un plan de formation obligatoire (initiale et périodique) sur les consignes de navigabilité pour tous les membres du personnel qui participent à l'évaluation des consignes de navigabilité.
Consigne de navigabilité du 2006-12-23
Lorsque l'exploitant a été avisé du jeu inscrit sur une carte de point de maintenance différé qui avait été reporté, il a immédiatement effectué une vérification des dossiers des autres appareils Boeing 737de sa flotte. Il a été confirmé qu'aucun de ces appareils n'était exploité avec des reports de conformité à la CN 2006-12-23.
Des mesures correctives à court terme ont été prises pour supprimer de la base de données sur la maintenance la procédure de service de maintenance problématique. Cette procédure a été révisée pour en supprimer les instructions de report incorrectes. L'entreprise s'est engagée à examiner toutes les procédures de service de maintenance de sa flotte pendant la mise en œuvre du logiciel TRAXqu'elle venait d'acquérir.
4.1.2.4 Radiobalise de repérage d'urgence
Après avoir été avisé par le BST que la radiobalise de repérage d'urgence (ELT) installée sur C‑GNWN n'avait pas été armée, First Air a entamé une enquête dans le cadre du SGS. Une inspection immédiate de la flotte a permis de confirmer que les ELT de tous les autres B737 étaient fonctionnelles.
L'enquête du SGS a déterminé ce qui suit :
L'ELT installée sur C-GNWN le 7 octobre 2010 n'a pas été placée en position ARMED après son installation, et la programmation du module d'interface de l'avion n'a pas été transférée au bloc émetteur de l'ELT.
L'installation de l'ELT a été effectuée conformément à l'avis de travail de maintenance périodique 59600. Le travail de maintenance « ELT replaced » a été consigné sur une feuille de travail supplémentaire faisant référence à la feuille de contrôle 292877, conformément à la politique de l'entreprise. L'avis de travail de maintenance périodique ne fait nullement référence au supplément du Aircraft Maintenance Manual MMS37-05-007 de l'avion, qui permet la détermination des anomalies et donne les instructions de dépose et d'installation.
La cause la plus probable de l'incident était un manque d'instructions claires relatives aux documents techniques, ce qui a fait en sorte que le mécanicien au sol n'a pas soumis le système installé à des essais, contrairement à ce qui est indiqué dans les instructions du supplément MMS37-05-007.
First Air a mis en œuvre la mesure corrective suivante :
Une directive de maintenance a été émise le 30 avril 2012 pour réitérer qu'il ne faut pas remplir de fiche de maintenance sans avoir vérifié si le travail de maintenance a été réalisé conformément au manuel d'entretien de l'avion et aux suppléments, ou à la section 6.5 du Company Maintenance Control Manual de l'entreprise.
Une note de service a été envoyée au service de planification lui demandant d'améliorer ses documents techniques autant que possible en fournissant des références de maintenance précises avant la publication des documents.
Comme mesure proactive, le programme de maintenance a été révisé pour y inclure l'exigence de soumettre les ELT à une vérification tous les 6 mois, conformément aux données approuvées, afin de vérifier l'état de fonctionnement.
4.1.2.5 Fonctionnement des compas
Le 18 février 2014, en réponse à un rapport d'incident et de danger interne concernant la précision et le fonctionnement des conservateurs de cap des B737-200, l'entreprise a émis la FOPM B737-14-013 (B737-200 Compass System – Directional Gyro Monitoring) à tous les membres d'équipage de B737. Ce document présente des exigences révisées sur la façon dont les vérifications de cap des compas devraient être effectuées et sur la fréquence de ces vérifications.
4.1.3 Aviation royale canadienne
Le 5 mars 2012, l'Aviation royale canadienne (ARC) a répondu à l'Avis de sécurité aérienne A11H0002-D1-A1 du BST, daté du 8 février 2012, à l'égard de la perte d'espacement IFR dans l'espace aérien contrôlé de classe D. La lettre précise que les équipes de dirigeants déployées en appui à de futures initiatives de gestion expéditionnaire de la circulation aérienne (GECA) comprendront dorénavant un officier contrôleur de la circulation aérienne principal; cette mesure vise à assurer la présence d'une plus grande expérience tout au long du processus de planification et du déroulement des opérations. Les leçons tirées de cet incident ont été communiquées aux contrôleurs de la circulation aérienne déployés dans le cadre de la plus récente opération militaire, l'opération Maple Resolve, et de solides plans ont été élaborés pour veiller à ce que le personnel de l'ARC soit prêt à fournir tous les services de circulation aérienne requis pour l'espace aérien établi. Le processus de planification suivi dans le cadre de l'opération Maple Resolve, en plus des ordonnances locales et des dispositions créées à l'égard du contrôle de l'espace aérien, tiendront lieu de modèles pour les futures initiatives de GECA. Ces leçons seront aussi communiquées à toutes les unités de contrôle de la circulation aérienne.
4.1.4 Transports Canada
Après l'accident, au cours de la période du 13 au 21 septembre 2011, TC a effectué une série d'inspections de processus pour vérifier la conformité au Règlement de l'aviation canadien (RAC) et aux Normes de service aérien commercial (NSAC) connexes. TC a examiné les activités et les domaines liés au déroulement sécuritaire des opérations aériennes commerciales à First Air, ce qui comprenaient la formation des équipages, l'appariement des membres d'équipage, la planification de vol, la répartition des vols (opérationnelle et technique), la surveillance et le suivi des vols, les processus de prise de décisions opérationnelles, le rôle des opérations commerciales dans la prise de décisions, les attentes de l'entreprise en matière de signalement des incidents et le contrôle des défectuosités.
Les inspections ont permis de conclure que les dossiers de formation des équipages de conduite, la consignation des défectuosités, les procédures de contrôle des corrections différées et les procédures de répartition technique ne satisfaisaient pas aux exigences réglementaires minimales énoncées aux alinéas 705.127(1)c), 726.08(1), 726.08m) et 726.08o) du RAC. On a trouvé des lacunes dans les processus : soit les pratiques de l'entreprise n'étaient pas conformes à la documentation, soit elles n'étaient pas efficaces.
Quatre constatations ont été faites. L'entreprise a soumis des plans de mesures correctives pour régler les problèmes de non-conformité constatés. Les plans de mesures correctives ont été acceptés, et le suivi ultérieur effectué par des inspecteurs de l'Aviation civile de TC a confirmé l'efficacité des mesures correctives mises en œuvre.
Le 27 août 2012, TC a répondu à la Lettre d'information sur la sécurité aérienne A11H0002-D2-L1 du BST, datée du 12 avril 2012, au sujet de directives insuffisantes en matière de maintenance des FDR. TC a reconnu que la référence aux spécifications de l'EUROCAE dans l'Appendice C de la Norme 625 du RACFootnote 171 était désuète. TC a indiqué de plus que le même problème de référence aux documents de l'EUROCAE désuets existait aussi dans les exigences relatives aux enregistreurs de conversations de poste de pilotage (CVR). TC a entrepris de réviser les exigences relatives aux CVR dans l'Appendice C de la Norme 625 du RAC et de fournir la référence appropriée aux plus récents documents de l'EUROCAE. Après avoir terminé l'élaboration de cette réglementation pour les exigences relatives aux CVR, TC commencera à élaborer les modifications réglementaires nécessaires pour mettre à jour les exigences relatives aux FDR.
4.1.5 NAV CANADA
Le 5 septembre 2012, NAV CANADA a répondu à l'information présentée par le BST au sujet des produits de navigation et a communiqué ce qui suit :
La représentation des points cotés a été ajoutée à un moment où on effectuait manuellement l'extraction et le placement de données. L'emplacement respecte les tolérances actuelles selon l'échelle du produit. NAV CANADA utilise maintenant un ensemble de technologies pour achever la conception de procédures et ajouter des données topographiques aux procédures de vol aux instruments. Toutes les cartes d'approche seront examinées et mises à jour au moyen de ces outils de janvier à août 2013.
La déclinaison magnétique à CYRB, et à tous les autres emplacements dans le Nord, a été mise à jour. NAV CANADA passe d'un système de mise à jour selon la date à un système déclenché par une valeur de tolérance de déclinaison magnétique.
4.2 Mesures de sécurité à prendre
4.2.1 Approches non stabilisées
Dans cet accident, l'avion est arrivé à une altitude et à une vitesse excessives en approche finale, n'était pas configuré en vue de l'atterrissage au moment opportun, n'avait pas intercepté le faisceau d'alignement de piste et dérivait vers la droite. Cette approche n'était pas considérée comme stabilisée conformément aux critères d'approche stabilisée de l'entreprise, et la situation exigeait une remise des gaz. Au lieu de cela, l'approche s'est poursuivie. Lorsque l'équipage a amorcé une remise des gaz, il était trop tard pour éviter l'impact avec le relief. Les approches non stabilisées constituent toujours un risque élevé pour la sécurité aérienne au Canada et à l'échelle mondiale.
Une recherche de la Flight Safety FoundationFootnote 172 a conclu que de 3,5 à 4 % des approches ne sont pas stabilisées. De celles-ci, 97 % se poursuivent jusqu'à l'atterrissage, tandis que seulement 3 % donnent lieu à une remise des gaz. Pour mettre ces chiffres en contexte, en 2012, la flotte mondiale d'avions à réaction commerciaux construits en Occident, de masse totale supérieure à 60 000 livres et exploités par l'aviation civile, a effectué 24,4 millions de vols. C'est-à-dire que de 854 000 à 976 000 de ces vols se sont terminés par une approche non stabilisée, et qu'environ de 828 000 à 945 000 de ceux-ci se sont poursuivis jusqu'à l'atterrissage. Les conséquences négatives potentielles de la poursuite d'une approche non stabilisée jusqu'à l'atterrissage sont notamment les impacts sans perte de contrôle (CFIT), les sorties en bout de piste, les atterrissages avant la piste et les contacts queue-sol.
Lorsqu'une approche non stabilisée est un facteur contributif d'un événement, la gravité des conséquences qu'elle entraîne peut varier, de l'absence de blessures et de dommages à de nombreux décès et à la destruction de l'avion. À Resolute Bay, la poursuite d'une approche non stabilisée a entraîné un accident de CFIT et la perte de 12 vies. Si on n'améliore pas la conformité aux politiques relatives aux approches stables, la plupart des approches non stabilisées se poursuivront jusqu'à un atterrissage, augmentant le risque de CFIT et d'accidents à l'approche et à l'atterrissage.
Dans le cadre cette enquête, le Bureau a examiné en détail les mesures de protection à la disposition des transporteurs aériens pour atténuer les risques liés aux approches non stabilisées et à leurs conséquences. Ces mesures de protection, en grande partie administratives, comprennent notamment :
une politique de l'entreprise à l'égard des approches stabilisées, qui comprend une politique de remise des gaz sans égard à la faute;
des critères d'approche stabilisée et des procédures d'utilisation normalisées (SOP) mis en pratique dans les opérations, incluant la phraséologie de l'équipage;
une gestion efficace des ressources en équipe (CRM), y compris l'habilitation des premiers officiers à prendre les commandes dans une situation non sécuritaire;
le recours à des programmes de suivi des données de vol (FDM) pour surveiller la conformité des SOP aux critères d'approche stabilisée;
le recours aux audits de sécurité en service de ligne (LOSA) ou à d'autres moyens, comme les contrôles des compétences et les vérifications en route, pour évaluer les pratiques de CRM et déterminer les adaptations aux SOP employées par les équipages;
des systèmes de signalement non punitif (pour signaler les événements ou les pratiques non sécuritaires);
l'utilisation de systèmes d'avertissement et d'alarme d'impact (TAWS).
Même si First Air avait déjà mis en place certaines de ces mesures de protection, notamment une politique et des critères en matière d'approche stabilisée, une politique de remise des gaz sans égard à la faute, le signalement des incidents et des dangers du système de gestion de la sécurité (SGS), la règle des deux appels et un dispositif avertisseur de proximité du sol (GPWS) de plus ancienne génération, ces mesures de protection n'étaient pas suffisamment robustes pour prévenir la poursuite de l'approche non stabilisée ou la collision avec le relief. D'autres enquêtes du BST ont révélé que la non-conformité aux SOP de l'entreprise liées aux approches stabilisées n'est pas unique à First Air.
En outre, l'utilisation de TAWS de nouvelle génération avec des fonctions d'évitement d'obstacle à balayage frontal améliorera la conscience de la situation des équipages de conduite et augmentera le temps disponible pour qu'ils puissent réagir. Cependant, si l'on veut réduire de façon significative le risque dans le système, l'industrie doit prendre d'autres mesures et ne pas se fier à des solutions purement technologiques.
Comme première mesure, l'exploitant doit avoir des politiques, des critères et des SOP pratiques et explicites en matière d'approches stabilisées qui sont intégrés dans la culture d'exploitation de l'entreprise.
Deuxièmement, les entreprises doivent avoir des programmes contemporains de formation initiale et périodique en CRM fournis par des instructeurs qualifiés et doivent surveiller et renforcer les compétences efficaces en CRM dans les opérations de vol quotidiennes. La CRM efficace est une mesure de protection contre les risques présents dans toutes les phases de vol, y compris les approches non stabilisées.
La troisième mesure porte sur la surveillance de la conformité aux SOP par l'intermédiaire de programmes comme le suivi des données de vol (FDM) et les audits de sécurité en service de ligne (LOSA). Au Canada, TC exige que les grands transporteurs commerciaux aient un SGS, des enregistreurs de conversations de poste de pilotage (CVR) et des enregistreurs de données de vol (FDR). Cependant, ces transporteurs ne sont pas obligés d'avoir un programme de FDM. Malgré cela, de nombreux exploitants téléchargent régulièrement leurs données de vol pour effectuer le FDM des activités normales. Les transporteurs aériens qui ont des programmes de suivi des données de vol ont eu recours à ces données pour déceler des problèmes, comme les approches non stabilisées et les approches précipitées, le dépassement des vitesses maximales volets sortis, les angles d'inclinaison excessifs après le décollage, les événements d'échauffement excessif du moteur, le dépassement des seuils de vitesse recommandés, les avertissements des GPWS et du TAWS, l'amorce d'un décrochage, les cadences de rotation excessives, les sorties de trajectoire de descente et l'accélération verticale.
Le FDM a été mis en œuvre dans de nombreux pays, et il est largement reconnu comme outil rentable pour améliorer la sécurité. Aux États-Unis et en Europe – grâce à l'OACI – un grand nombre de transporteurs ont des programmes à cette fin depuis des années. Certains exploitants d'hélicoptères effectuent déjà la surveillance des données de vol, et la Federal Aviation Administration (FAA) des États-Unis a formulé une recommandation à cet égard.
À l'échelle mondiale, le suivi des données de vol a permis d'améliorer la sécurité en donnant aux exploitants les outils qui leur permettent d'examiner attentivement les différents vols et, au bout du compte, l'exploitation de leur flotte au fil des ans. Cet examen de données objectives, surtout comme composante intégrante et non punitive du système de gestion de la sécurité d'une entreprise, s'est révélé avantageux pour déterminer et corriger de façon proactive les lacunes et prévenir les accidents.
Les mesures de protection actuelles contre la poursuite des approches non stabilisées se sont révélées inadéquates. Au Canada, tandis que de nombreux exploitants régis par la sous-partie 705 du RAC ont volontairement mis en œuvre des programmes de FDM, rien ne les oblige à le faire. First Air n'assurait pas le suivi des données de vol au moment de l'accident en cause. De plus, les programmes de FDM doivent examiner spécifiquement pourquoi les approches non stabilisées se produisent, de quelle façon les équipages réagissent à celles-ci, si les équipages respectent ou non les critères et les procédures d'approche stabilisée et pourquoi les équipages poursuivent une approche non stabilisée jusqu'à l'atterrissage. À moins de prendre d'autres mesures pour réduire la fréquence des approches non stabilisées et la grande proportion de celles-ci qui se poursuivent jusqu'à l'atterrissage, le risque d'accidents à l'approche et à l'atterrissage persistera.
Par conséquent, le Bureau recommande que :
Transports Canada exige que les exploitants régis par la sous-partie 705 du RAC surveillent les approches non stabilisées qui se poursuivent jusqu'à l'atterrissage et en réduisent la fréquence. Recommandation A14-01 du BST
4.3 Préoccupations liées à la sécurité
4.3.1 Normes de formation en gestion des ressources en équipe
Dans l'accident en cause, l'équipage a atteint un état de saturation des tâches pendant l'approche finale et n'a pas maintenu une conscience commune de la situation. L'approche non stabilisée s'est poursuivie, et la CRM de l'équipage était inefficace. Le premier officier a essayé à plusieurs reprises de communiquer ses préoccupations et de suggérer une remise des gaz. En l'absence de politiques ou de procédures claires permettant à un premier officier de prendre les commandes, le premier officier était probablement réticent à le faire.
Le programme de formation en CRM de First Air avait été approuvé par TC en conformité à la norme de formation en CRM en vigueur. Cependant, après l'accident, des enquêteurs du BST ont assisté à un cours de formation initiale en CRM de First Air et ont déterminé que la formation donnée n'abordait pas tous les sujets décrits dans la NSAC 725.124(39). La matière de formation en CRM était enseignée au cours d'une période de plusieurs heures dans 1 journée, en même temps que d'autres sujets. Les documents d'orientation de TC, sur lesquels reposait la formation en CRM de First Air, indiquent que la formation devait se donner en 2 jours. Ni l'un ni l'autre des instructeurs en CRM de l'entreprise n'avait reçu de formation officielle d'animateur ou d'instructeur ou n'avait reçu une accréditation en enseignement de la CRM.
La formation initiale et périodique en CRM de First Air n'a pas fourni à l'équipage du vol FAB6560 suffisamment de stratégies pratiques pour les aider avec la prise de décisions, la résolution de problèmes, la communication et la gestion de la charge de travail. L'enquête a conclu que si la formation initiale en CRM ne permet pas de développer des compétences efficaces en la matière, et si le renforcement de ces compétences dans le cadre de la formation périodique n'est pas adéquat, il se peut que les équipages de conduite ne soient pas en mesure de gérer adéquatement les risques dans le poste de pilotage. En outre, si les exploitants ne prennent pas les mesures nécessaires pour veiller à ce que les équipages de conduite appliquent systématiquement des pratiques efficaces de CRM en cours de vol, les risques pour la sécurité aérienne vont persister.
L'enquête a aussi relevé un certain nombre d'adaptations aux SOP de l'entreprise, employées non seulement par l'équipage en cause, mais aussi par les équipages de B737 à Yellowknife. Ces adaptations n'avaient pas été détectées par les activités de supervision de First Air. Les adaptations aux SOP au cours du vol FAB6560 ont eu pour conséquence une mauvaise communication entre les membres de l'équipage, un accroissement de la charge de travail jusqu'à la saturation des tâches et une dégradation de la conscience commune de la situation.
Pendant chaque vol, les pilotes doivent être capables de bien interagir les uns avec les autres, avec leur aéronef et avec leur environnement, en utilisant les listes de vérifications et les SOP connexes de l'entreprise pour assurer une gestion efficace des menaces, des erreurs ou des états indésirables de l'aéronef qui pourraient survenir. On atteint cet objectif en formant les équipages de conduite à utiliser diverses stratégies pour aider à améliorer l'efficacité. La CRM est une mesure de protection contre les risques présents dans toutes les phases de vol, y compris les approches non stabilisées. Il se peut que certains pilotes ne gèrent pas les risques opérationnels de façon adéquate en raison de compétences inefficaces en CRM.
Il existe une variété de normes et de règlements en matière de CRM partout dans le monde. Malgré ces différences, dans le milieu de l'aviation, on s'entend pour dire que les programmes de CRM doivent comprendre 3 phases distinctes. La première phase est la formation de familiarisation et de sensibilisation. La deuxième phase est la pratique, la rétroaction et la formation périodique. Au cours des dernières années, on reconnaissait davantage que la formation en CRM serait plus efficace si elle était intégrée à la formation technique dès le début du régime de formation des équipages de conduite. Il a été constaté que les programmes de formation en CRM qui comprennent la formation périodique et la mise en pratique de stratégies de CRM entraînent des changements importants dans le rendement des équipages de conduite durant les séances d'entraînement type vol de ligne et en cours de vol. La troisième phase est le renforcement continu. Un moyen efficace d'assurer le renforcement continu est d'intégrer des compétences et des comportements essentiels en CRM aux SOP de l'entreprise, pour que la CRM fasse partie intégrante de l'ensemble de la formation et des opérations. En résumé, l'acquisition et le maintien de compétences efficaces en CRM dépendent de la prestation de formation initiale et périodique contemporaine en CRM par des instructeurs dûment qualifiés, de même que de la surveillance continue et du renforcement du rendement en exploitation normale.
Le BST a antérieurement formulé une recommandation (A09-02) et publié des faits établis quant aux risquesFootnote 173 liés à la prestation de formation en CRM aux exploitants commerciaux relevant de la partie VII, et liés aux normes de formation en CRM et aux qualifications des instructeurs. Au Canada, la norme de formation en CRM en vigueur ne comprend pas les concepts modernes de gestion des menaces et des erreurs. Il n'y a pas d'exigences en matière d'expérience, de formation ou de qualification pour enseigner la CRM. Par contre, la Civil Aviation Authority (CAA) du Royaume-Uni a mis au point une série de conditions d'accréditation rigoureuses pour les instructeurs de CRM et les examinateurs d'instructeurs.
Même si, au Canada, la réglementation en matière CRM n'a pas été mise à jour pour tenir compte des notions modernes de CRM, d'autres programmes dirigés par TC intègrent déjà certaines de ces notions. Par exemple, le Programme avancé de qualification, le programme de pilote vérificateur agréé et la licence de pilote en équipage multiple attachent une importance considérable aux concepts et aux stratégies de gestion des menaces et des erreurs. En outre, chacun de ces programmes souligne aussi l'importance d'être en mesure d'évaluer ces compétences dans le cadre d'un programme de formation axé sur les compétences.
TC a mis en œuvre des mesures d'atténuation supplémentaires. Un groupe de discussion formé de représentants de TC et de l'industrie s'est réuni en janvier 2012 et a présenté un rapport final en février 2012. Le rapport proposait des éléments d'une norme de formation contemporaine en CRM pour les exploitants commerciaux régis par la partie VII, mais recommandait de ne pas fixer de durée obligatoire pour les cours de CRM et de ne pas exiger d'accréditation officielle pour les instructeurs de CRM. Le Comité de réglementation de l'Aviation civile (CRAC) a accepté les recommandations du groupe de discussion de TC (se reporter à la rubrique 1.17.7.3) et, le 24 avril 2012, a demandé que soient élaborées une réglementation et une norme en matière de formation contemporaine en CRM pour les sous-parties 702, 703, 704 et 705 du RAC.
On ne sait toujours pas à quel point la nouvelle norme de formation et les documents d'orientation de TC seront détaillés comparativement à la norme en vigueur, ni encore à quel moment la nouvelle norme entrera en vigueur. On ne sait pas non plus comment TC veillera à ce que les exploitants appliquent la nouvelle norme de formation afin de s'assurer que les équipages de conduite acquièrent et maintiennent des compétences efficaces en CRM.
Par conséquent, le Bureau craint que, sans une approche exhaustive et intégrée à l'égard de la CRM de la part de TC et des exploitants aériens, il se peut que les équipages de conduite ne mettent pas systématiquement en pratique une CRM efficace.
Le présent rapport met fin à l'enquête du Bureau de la sécurité des transports sur cet incident. Le Bureau a autorisé la publication du rapport le . Il est paru officiellement le .
Annexes
Annexe A – Chronologie des événements du vol FAB6560
(se reporter à l'annexe X – Liste des acronymes et des abréviations)
Chronologie des événements
UTC
Événement
13 h 55 min 53 s
L'ATC de NAV CANADA émet l'autorisation IFR suivante au vol FAB6560 : Cleared to CYRB via the CYZF SID 1 departure, flight planned route, squawk 4625 [traduction : autorisé jusqu'à CYRB via le départ SID1 de CYZF, itinéraire prévu, afficher 4625].
14 h 40
Le vol FAB6560 décolle de CYZF.
14 h 50
Le vol FAB6560 entre dans l'espace aérien intérieur du Nord approximativement à RIBUN.
14 h 55
L'équipage de conduite du vol FAB6560 reçoit le SPECI de 14 h 50 pour CYRB de l'agent d'opérations de l'entreprise.
14 h 56 min 51 s
Le vol FAB6560 se met en palier au FL310.
14 h 58 min 57 s
Début des données valides du FDR.
15 h 10
L'équipage de conduite du vol FAB6560 reçoit le METAR de 15 h pour CYRB de l'agent d'opérations de l'entreprise.
15 h 11
Décision conjointe de l'équipage de conduite et de l'agent d'opérations de procéder vers CYRB.
15 h 48 min 25 s
Le vol FAB6560 fait un virage à gauche à CB à 72° N, 100°45′ W.
16 h 09 min 20 s
L'équipage de conduite du vol FAB6560 reçoit le METAR de 16 h pour CYRB.
16 h 10 min 43 s
Début de l'enregistrement du CVR.
De 16 h 14 min 59 s
à
16 h 16 min 24 s
Les pilotes discutent du chargement de l'approche RNAV de la piste 35T de CYRB dans les plans de vol de GPS, sélectionnant le repère d'approche initial ESTAP, et naviguant directement au point de cheminement MUSAT.
16 h 15 min 24 s
Le commandant de bord décrit son plan de faire la transition à l'alignement de piste à l'aide de la RNAV, pour ensuite passer à l'ILS.
16 h 15 min 27 s
Le P/O est d'accord avec le plan du commandant.
16 h 16 min 45 s
Les pilotes sélectionnent un itinéraire direct à MUSAT sur le GPS; le vol FAB6560 fait un virage à droite pour voler directement à MUSAT.
16 h 17 min 8 s
Le CVR commence à enregistrer les indicatifs en code Morse d'IRB et du DME, répétés toutes les 32,3 secondes.
16 h 17 min 11 s
Le commandant effectue l'exposé d'approche.
16 h 17 min 41 s
Le P/O fait un commentaire sur la vitesse sol élevée.
16 h 17 min 44 s
Le commandant déclare qu'il prévoit amorcer la descente à 105 milles de CYRB.
16 h 18 min 40 s
Le P/O appelle le terminal militaire de CYRB et n'obtient pas de réponse.
16 h 22 min 16 s
Le P/O appelle l'ACC d'Edmonton de NAV CANADA, demande l'autorisation de descente et n'obtient pas de réponse.
16 h 22 min 47 s
Le P/O appelle l'ACC d'Edmonton de NAV CANADA, annonce la fréquence radio utilisée et n'obtient pas de réponse.
16 h 23 min 12 s
Le P/O appelle l'ACC d'Edmonton de NAV CANADA et annonce la fréquence radio utilisée.
16 h 23 min 17 s
L'ACC d'Edmonton de NAV CANADA répond et indique au vol FAB6560 de l'aviser lorsqu'il demanderait l'autorisation de descente.
16 h 23 min 21 s
Le P/O avise l'ACC d'Edmonton de NAV CANADA que le vol FAB6560 demande l'autorisation de descente.
16 h 23 min 29 s
L'ACC d'Edmonton de NAV CANADA autorise le vol FAB6560 à descendre hors de l'espace aérien supérieur contrôlé aux alentours de CYRB et demande à l'équipage de se rapporter au FL270.
16 h 23 min 40 s
Le commandant amorce la descente à partir du FL310.
16 h 23 min 41 s
Le P/O répète l'autorisation de descente et accuse réception de l'instruction de se rapporter au FL270.
16 h 23 min 51 s
L'ACC d'Edmonton de NAV CANADA informe le vol FAB6560 de l'activité militaire dans la région et de prévoir le passage au terminal militaire de CYRB après avoir quitté le FL270.
16 h 24 min 2 s
Le P/O accuse réception de l'avis et annonce la fréquence du terminal militaire de CYRB.
16 h 24 min 11 s
L'ACC d'Edmonton de NAV CANADA confirme que la fréquence du terminal militaire de CYRB est la bonne, et avise le vol FAB6560 que le terminal militaire de CYRB contrôle l'espace aérien au FL200 et en dessous, en plus de l'aviser que l'espace aérien entre le FL270 et le FL200 n'est pas contrôlé.
16 h 24 min 27 s
Le commandant demande la vérification avant descente.
16 h 24 min 31 s
Le P/O donne 2 coups de sonnerie dans la cabine.
16 h 24 min 32 s
Le P/O commence la vérification avant descente.
16 h 24 min 37 s
Le commandant annonce les curseurs réglés pour une VREF de 132 nœuds et les volets à la position 40.
16 h 24 min 39 s
Le P/O annonce les curseurs réglés pour une VREF de 132 nœuds et les volets à la position 40, et procède à l'interrogation relative au compas de la liste de vérifications.
16 h 24 min 42 s
Le commandant répond à l'interrogation relative au compas par « Sync mag cross-check » [traduction : synchronisation magnétique contre-vérifié].
16 h 24 min 43 s
Le P/O fait remarquer au commandant qu'il a dit « mag ».
16 h 24 min 43 s
Le commandant répond par « Sync DG cross-check », déclare qu'il effectue une vérification et indique « twenty nine true » [traduction : vingt-neuf vrais].
16 h 25 min 1 s
Le commandant interroge le P/O quant à son affichage.
16 h 25 min 4 s
Le P/O répond « Zero three zero » [traduction : zéro trois zéro].
Le P/O annonce que les vérifications avant descente sont terminées.
16 h 26 min 3 s
Le P/O appelle l'ACC d'Edmonton de NAV CANADA et signale avoir franchi le FL260.
16 h 26 min 11 s
L'ACC d'Edmonton de NAV CANADA accuse réception et demande au vol FAB6560 de communiquer avec le terminal militaire de CYRB.
16 h 26 min 27 s
Le P/O fait un premier appel au terminal militaire de CYRB.
16 h 26 min 42 s
Le terminal militaire de CYRB répond à l'appel et demande à l'avion de répéter la transmission.
16 h 26 min 46 s
Le P/O répète l'appel au terminal militaire de CYRB.
16 h 27 min 1 s
Le terminal militaire de CYRB répond.
16 h 27 min 9 s
Le P/O appelle le terminal militaire de CYRB, l'avise que la réception est mauvaise et qu'il appellera lorsqu'il sera plus près de CYRB. Fournit une ETA de 16 h 43 à CYRB et l'informe du plan pour la piste 35.
16 h 27 min 35 s
Le terminal militaire de CYRB accuse réception de la transmission et demande au vol FAB6560 d'essayer une fois de plus dans quelques milles lorsque la communication sera meilleure.
16 h 28 min 43 s
Le commandant informe le P/O qu'ils franchissent en descente le FL200.
16 h 28 min 49 s
Le commandant annonce le calage altimétrique de 29,81.
16 h 29 min 21 s
Le P/O informe la base de l'entreprise à CYRB que leur ETA à l'aire de trafic est 16 h 45 et qu'ils auront besoin de carburant.
16 h 29 min 49 s
Le P/O appelle le terminal militaire de CYRB.
16 h 29 min 57 s
Le terminal militaire de CYRB répond.
16 h 30 min 2 s
Le P/O demande au terminal militaire de CYRB s'il a reçu l'ETA du vol FAB6560 et la piste prévue.
16 h 30 min 9 s
Le terminal militaire de CYRB avise le vol FAB6560 qu'il a reçu l'information et que l'unité militaire de contrôle terminal n'est pas en vigueur et ne fait qu'assurer la délivrance d'autorisations.
16 h 30 min 11 s
Le terminal militaire de CYRB fournit des renseignements sur la circulation d'un autre vol à 50 milles au sud-est de CYRB, à 10 000 pieds en rapprochement vers CYRB.
16 h 30 min 15 s
Le terminal militaire de CYRB demande au vol FAB6560 de communiquer avec la tour militaire de CYRB.
16 h 30 min 31 s
Le P/O accuse réception des renseignements sur la circulation et de l'instruction de communiquer avec la tour militaire de CYRB.
16 h 30 min 50 s
Le P/O appelle la tour militaire de CYRB.
16 h 30 min 56 s
La tour militaire de CYRB répond et fournit le calage altimétrique de 29,81.
16 h 31 min 45 s
La tour militaire de CYRB demande au vol FAB6560 de se rapporter en finale pour la piste 35T et l'informe du vent estimé du 160° à 10 nœuds.
16 h 31 min 53 s
Le P/O demande à la tour militaire de CYRB un rapport sur l'état de la piste à CYRB.
16 h 32 min 1 s
La tour militaire de CYRB informe le vol FAB6560 que la piste est légèrement mouillée et qu'aucun autre aéronef ne l'a utilisée au cours de la matinée.
16 h 32 min 7 s
Le P/O accuse réception du rapport sur l'état de la piste.
16 h 32 min 35 s
Le vol FAB6560 descend sous les 10 000 pieds.
16 h 32 min 46 s
Le commandant demande la liste de vérifications en approche.
16 h 32 min 48 s
Le P/O verbalise : consignes lumineuses des ceintures allumées, antigivrage activé, protecteur de gravier activé, climatisation et pressurisation réglées pour l'atterrissage.
16 h 33 min 9 s
Le commandant demande au P/O d'attendre avant d'exécuter les autres éléments de la liste de vérifications.
16 h 33 min 14 s
Un des pilotes signale avoir franchi les 10 000 pieds.
16 h 36 min 23 s
Le commandant demande au P/O de continuer les vérifications en approche sous la ligne.
16 h 36 min 33 s
Le P/O appelle les instruments de NAV.
16 h 36 min 35 s
Le commandant répond « VHF NAV ».
16 h 36 min 38 s
Le P/O répond « VHF NAV ».
16 h 37
Le P/O annonce que les vérifications en approche sont terminées.
16 h 37 min 25 s
Le commandant demande de régler les volets à la position 1.
16 h 37 min 40 s
Le P/O annonce les volets à la position 1, voyant vert.
16 h 37 min 42 s
Le commandant demande les volets à la position 5 et la liste de vérifications avant l'atterrissage.
16 h 37 min 47 s
Le P/O annonce que la position 5 des volets est sélectionnée.
16 h 37 min 51 s
Le P/O accuse réception de la demande de la liste de vérifications avant l'atterrissage et amorce les vérifications avant l'atterrissage.
16 h 37 min 53 s
Deux coups de sonnerie.
16 h 38 min 5 s
Le P/O déclare que les vérifications avant l'atterrissage sont terminées jusqu'au train et aux volets.
16 h 38 min 20 s
Le P/O annonce le fonctionnement de l'alignement de piste.
16 h 38 min 21 s
Le vol FAB6560 amorce un virage à gauche.
16 h 38 min 25 s
Le P/O annonce le fonctionnement de l'alignement de descente.
16 h 38 min 32 s
Le P/O avise la tour militaire de CYRB que le vol FAB6560 est à 10 milles en finale pour la piste 35.
16 h 38 min 38 s
Le commandant demande la sortie du train.
16 h 38 min 39 s
La tour militaire de CYRB demande au vol FAB6560 de se rapporter à 3 milles en finale.
16 h 38 min 42 s
Le commandant demande de régler les volets à la position 15.
16 h 38 min 46 s
Le P/O demande à la tour militaire de CYRB de répéter la transmission précédente.
16 h 38 min 48 s
Le P/O annonce la sortie du train, 3 voyants verts.
De 16 h 38 min 49 s
à
16 h 38 min 57 s
Des manœuvres du volant de commande ont lieu.
16 h 38 min 49 s
La tour militaire de CYRB demande au vol FAB6560 de se rapporter à 3 milles en finale.
16 h 38 min 53 s
Le P/O accuse réception de l'instruction.
16 h 38 min 55 s
Le P/O annonce les volets à la position 15, voyant vert.
16 h 39 min 5 s
Le vol FAB6560 revient les ailes à l'horizontale.
16 h 39 min 10 s
Signal sonore de l'avertisseur d'altitude à 3200 pieds asl.
De 16 h 39 min 13 s
à
16 h 39 min 30 s
Le P/O fait 5 déclarations relativement à l'écart latéral de l'avion par rapport à la trajectoire voulue.
16 h 39 min 18 s
Une manœuvre du volant de commande a lieu.
De 16 h 39 min 33 s
à
16 h 39 min 37 s
Le commandant fait 2 déclarations indiquant qu'il croit que le pilote automatique suit la trajectoire correctement.
16 h 39 min 36 s
Une manœuvre du volant de commande a lieu.
16 h 39 min 46 s
Le P/O fait une déclaration au sujet de l'écart de trajectoire affiché au GPS.
16 h 39 min 49 s
Le vol KBA909 avise la tour militaire de CYRB qu'il prévoit un alignement arrière vers la piste 17T dans 5 minutes.
16 h 39 min 52 s
Signal sonore de l'avertisseur d'altitude à 1950 pieds asl.
16 h 39 min 57 s
Le P/O déclare que l'avion n'est pas en mode d'approche au pilote automatique, mais seulement sur le directeur de vol.
16 h 40 min 4 s
La poussée commence à augmenter de ralenti à 1,4 EPR.
16 h 40 min 7 s
Le P/O demande au commandant de confirmer la déviation complète.
16 h 40 min 8 s
Le commandant est d'accord et demande pourquoi une déviation complète lorsqu'ils sont sur la trajectoire d'alignement de piste.
16 h 40 min 11 s
Le P/O déclare qu'ils ne sont pas sur l'alignement de piste.
16 h 40 min 14 s
Le commandant déclare « It's captured; ten three is the localizer? » [traduction : c'est capté; dix trois est l'alignement de piste?].
16 h 40 min 17 s
Le P/O n'est pas d'accord avec la capture d'alignement de piste et rappelle au commandant la présence d'une colline à droite de la piste.
16 h 40 min 23 s
Le P/O déclare que le GPS indique aussi vers la droite.
16 h 40 min 25 s
Le P/O demande au commandant s'ils ont fait quelque chose d'incorrect.
16 h 40 min 30 s
Le P/O déclare être d'avis qu'ils devraient interrompre l'approche, puis régler le problème de navigation.
16 h 40 min 33 s
Le commandant indique qu'il a l'intention de continuer l'approche.
16 h 40 min 35 s
Le P/O accuse réception de l'intention du commandant de continuer l'approche.
16 h 40 min 36 s
Le vol FAB6560 descend sous les 1000 pieds au-dessus de l'altitude de l'aérodrome. Les critères d'approche stabilisée entrent en vigueur.
16 h 40 min 41 s
Le P/O déclare « We're 3 mile final; we're not configged » [traduction : à 3 milles en finale; nous ne sommes pas configurés].
16 h 40 min 45 s
Le commandant demande de régler les volets à la position 25.
16 h 40 min 49 s
Le P/O signale que le GPS indique aussi une déviation complète.
16 h 40 min 52 s
Le P/O recommande une mesure corrective – un virage à gauche.
16 h 40 min 54 s
Le commandant indique qu'il ne peut pas virer à gauche.
16 h 40 min 55 s
Le vol KBA909 entre dans la zone de contrôle de classe D de CYRB à partir du sud-est.
16 h 40 min 56 s
Le P/O commence à formuler un avis au sujet de la trajectoire.
16 h 40 min 57 s
Le commandant interrompt la déclaration du P/O en demandant les volets à la position 30.
De 16 h 40 min 59 s
à
16 h 41 min 8,3 s
Le commandant et le P/O discutent de la configuration et de ce qui est affiché au directeur de vol, au GPS et au pilote automatique.
16 h 41 min 5 s
La poussée commence à augmenter d'environ 1,08 EPR à 1,47 EPR.
16 h 41 min 8,3 s
Le P/O dit « So let's just … » [traduction : alors, faisons…].
16 h 41 min 8,7 s
Le commandant interrompt la déclaration du P/O en demandant les volets à la position 40.
16 h 41 min 10,1 s
Le P/O annonce voyant vert, train sorti, 3 voyants verts.
16 h 41 min 11,2 s
Le P/O annonce les volets à la position 40, voyant vert.
16 h 41 min 16,3 s
Le commandant fait une déclaration indiquant qu'un autre pilote avait déjà vécu une situation semblable.
16 h 41 min 18 s
L'angle de tangage commence à diminuer de +2° à −4,8°.
16 h 41 min 26,3 s
Le commandant fait une déclaration au sujet de la présence de l'indicateur d'alignement de descente.
16 h 41 min 28,3 s
Le P/O déclare que l'alignement de descente a atteint la déviation complète.
16 h 41 min 30,8 s
Le P/O avise la tour militaire de CYRB que le vol FAB6560 est à 3 milles en finale.
16 h 41 min 33,1 s
La tour militaire de CYRB déclare que le vent est estimé du 150° à 7 nœuds et autorise le vol FAB6560 à atterrir sur la piste 35T.
16 h 41 min 39,4 s
Le P/O fait une transmission incomplète à la tour militaire de CYRB.
16 h 41 min 41,1 s
Le P/O déclare « Just over the shoreline » [traduction : juste au-dessus du rivage].
16 h 41 min 43,2 s
Le P/O profère un juron.
16 h 41 min 46 s
L'angle de tangage commence à augmenter depuis −5°.
16 h 41 min 46,6 s
Le P/O, appelant le commandant par son prénom, déclare « I don't like this » [traduction : je n'aime pas ça].
16 h 41 min 47,1 s
La tour militaire de CYRB demande au vol FAB6560 de répéter la dernière transmission.
Le P/O déclare « Go for it » [traduction : allons-y].
16 h 41 min 49,2 s
GPWS : « Minimums ».
16 h 41 min 50,1 s
Le P/O déclare « Go around » [traduction : remise des gaz].
16 h 41 min 50,7 s
GPWS : « Minimums ».
16 h 41 min 51,2 s
Le commandant demande « Go-around thrust » [traduction : poussée de remise des gaz].
16 h 41 min 51,8 s
Le vol FAB6560 entre en collision avec le relief.
Annexe B – Carte de la procédure d'approche aux instruments de la piste 35T (degrés vrais) par navigation de surface à l'aide du système mondial de navigation par satellite [en anglais seulement]
Tiré du NAV CANADA, Canada Air Pilot, CAP 1 : Yukon, Territoires du Nord-Ouest et Nunavut (en vigueur le 30 juin 2011).
NE DOIT PAS ÊTRE UTILISÉ POUR LA NAVIGATION
Annexe C – Carte de la procédure d'approche pour système d'atterrissage aux instruments avec équipement de mesure de distance de la piste 35T (degrés vrais) [en anglais seulement]
Tiré du NAV CANADA, Canada Air Pilot, CAP 1 : Yukon, Territoires du Nord-Ouest et Nunavut (en vigueur le 30 juin 2011).
NE DOIT PAS ÊTRE UTILISÉ POUR LA NAVIGATION
Annexe E – Systèmes de compas de C-GNWN : renseignements complémentaires
Sélecteur de transfert compas
En cas de panne d'un compas, le sélecteur de transfert compas permet à l'autre compas de fournir les renseignements sur le cap aux instruments des 2 pilotes. Ce sélecteur se trouve sur le panneau supérieur du côté du commandant, à côté du sélecteur VHF NAV (navigation à très haute fréquence).
Distribution d'information de cap des systèmes de compas de C-GNWN
Lorsque le sélecteur de transfert compas est en position NORMAL, la distribution d'information de cap se fait comme suit :
L'information de cap du conservateur de cap (DG) no 1 est affichée à l'indicateur radiomagnétique (RMI) du commandant, qui répète ensuite cette information à l'indicateur de situation horizontale (HSI) du premier officier (P/O) et au système de navigation VHF. L'information fournie par le DG no 1 par l'intermédiaire du RMI du commandant commande l'affichage de cap du HSI du P/O et les signaux « set course » [traduction : réglage de route] et « set heading » [traduction : réglage de cap]. Les signaux de réglage de route et de cap sont ensuite envoyés à l'ordinateur de pilotage 2 du directeur de vol.
L'information de cap du DG no 2 est affichée au RMI du P/O, qui répète ensuite cette information au HSI du commandant et à l'enregistreur de données de vol. L'information fournie par le DG no 2 par l'intermédiaire du RMI du P/O commande l'affichage de cap du HSI du commandant et est également utilisée par le HSI du commandant pour les signaux de réglage de route et de cap. Les signaux de réglage de route et de cap sont ensuite envoyés au pilote automatique et à l'ordinateur de pilotage 1 du directeur de vol.
Sonde magnétométrique et commande compas
Les sondes magnétométriques détectent la direction du champ magnétique de la Terre. Lorsque le sélecteur MAG/DG de la commande compas (figure 20) est en position MAG (magnétique), les sondes magnétométriques alignent la sortie du DG avec le nord magnétique et fournissent un système de compas magnétique stable. Dans ce mode, le système de compas compense la précession gyroscopique vraie et apparente.
Figure 20. Exemple de commande compas [en anglais seulement]Footnote 174
Cependant, dans les environs des pôles magnétiques de la Terre, les systèmes de compas magnétiques sont sujets à l'erreur et ne conviennent pas à la navigation. Dans ces régions où le compas n'est pas fiable, il faut utiliser d'autres méthodes de navigation. Ces méthodes comprennent l'exploitation des DG de l'aéronef en mode conservateur de cap autonome par rapport au nord vrai plutôt qu'au nord magnétique.
Lorsque le sélecteur MAG/DG est en position DG, l'entrée de la sonde magnétométrique est retirée du système de compas C-11B. La sortie cap du DG n'est plus asservie au nord magnétique, et le système de compas revient au mode conservateur de cap autonome. En mode conservateur de cap autonome, le système est assujetti à la précession vraie et apparente du DG.
La commande compas comporte un compensateur de la latitude réglable. Pour neutraliser la précession de rotation terrestre, les pilotes doivent régler ce compensateur à la bonne latitude en cours de vol. La commande compas est également dotée d'un sélecteur de transfert de latitude à régler selon que l'avion est exploité dans l'hémisphère nord ou l'hémisphère sud.
Comparateur d'instruments
Un système d'avertissement pour les instruments compare les indications de cap des compas ainsi que d'assiette en tangage et en roulis du commandant et du P/O, et les signaux de sortie de l'écart par rapport à l'alignement de piste et de descente des unités de VHF NAV no 1 et no 2. Il y a un voyant annonciateur de comparateur d'instruments (photo 6) au-dessus du tableau de bord de chaque pilote.
Dans le cas des renseignements sur le cap, le comparateur allume des voyants jaunes sur les 2 voyants annonciateurs lorsque la différence entre les compas no 1 et no 2 est supérieure aux tolérances suivantes :
ailes à l'horizontale : 6° ±2°;
inclinaison de 20° : 10° ±2,5°;
alignement de descente capté : 4,5° ±1°.
Photo 6. Comparateur d'instruments du commandant de C-GNWN
Le bouton en haut à droite de chaque RMI est la commande de synchronisation de compas, qui permet au pilote de synchroniser le RMI avec le système de compas pertinent (figure 21).
Figure 21. Exemple d'indicateur radiomagnétique (RMI)
Le HSI affiche la position et le cap de l'aéronef par rapport au nord vrai ou magnétique, le cap sélectionné, l'équipement de mesure de distance (DME), la déviation latérale par rapport à un VOR (radiophare omnidirectionnel VHF) ou un axe d'alignement de piste sélectionné et la déviation verticale par rapport au centre du faisceau d'alignement de descente (figure 22).
Le symbole d'avion fixe affiche la position et le cap de l'aéronef par rapport à la rose compas, à la barre d'écart de route et au cap sélectionné. La rose compas rotative affiche les renseignements sur le cap du système de compas. Le cap de l'aéronef est lu sur la rose, sous la ligne de foi dans le haut au centre de l'instrument.
Le curseur de cap est réglé au cap voulu sur la rose compas. Une fois réglé, le curseur de cap pivote avec la rose compas. La flèche de route est réglée sur le radial VOR ou l'alignement de piste voulu sur la rose compas. Une fois réglée, la flèche de route pivote avec la rose compas.
La barre d'écart de route représente le centre du VOR ou de l'alignement de piste sélectionné et affiche l'écart de route. La lecture de la barre d'écart de route se fait par rapport au symbole de référence de l'avion, et fournit au pilote des renseignements sur la déviation latérale par rapport à la route sélectionnée et sur la direction du virage pour corriger les écarts de route.
Lorsque le récepteur de navigation est réglé à la fréquence d'un radiophare d'alignement de piste, le déplacement initial de la barre d'écart de route commence à des écarts angulaires de 2,4° à 4,0° par rapport à l'axe d'alignement de piste, selon la largeur du faisceau pour une installation particulière du système d'atterrissage aux instruments (ILS). La partie linéaire de 2 points de l'échelle d'écart de route représente un écart angulaire de 2,5°, selon l'installation particulière de l'ILSFootnote 175.
Annexe F – Système de pilote automatique de C-GNWN : renseignements complémentaires
Panneau de commande de mode du pilote automatique
Le pilote automatique a 2 chaînes : 1 chaîne de tangage et 1 chaîne de roulis. Les fonctions de tangage et de roulis sont distinctes et se trouvent dans des boîtiers électroniques analogiques distincts dans le compartiment avionique.
Contacteurs d'embrayage du pilote automatique
Le panneau de commande de mode du pilote automatique a 2 contacteurs d'embrayage à palette : 1 pour la chaîne de roulis et 1 pour la chaîne de tangage (photo 7). Chaque contacteur à palette est doté d'un ressort qui le met en position débrayée, et est maintenu en position embrayée de manière électromagnétique en présence de certaines conditions. Les chaînes de tangage et de roulis peuvent être actionnées indépendamment l'une de l'autre. L'état d'embrayage par défaut est le mode CWS (pilotage transparent) manuel à la fois pour le tangage et le roulis. L'aéronef maintient l'assiette en tangage au moment de l'embrayage. Le compensateur du stabilisateur automatique, qui est une fonction de la chaîne de tangage, compense les changements d'état compensé de l'aéronef.
Photo 7. Panneau de commande de mode du pilote automatique
Sélecteur de mode de tangage du pilote automatique
Le sélecteur de mode de tangage du pilote automatique est un sélecteur rotatif situé du côté droit du panneau de commande de mode du pilote automatique. Il a 3 positions : TURB, OFF et ALT HOLD. Le sélecteur est doté d'un ressort qui le met en position OFF et est maintenu de manière électromagnétique aux autres positions si les systèmes d'interverrouillage sont maintenus. Chacun des sous-modes de tangage est décrit ci-dessous.
OFF − exploitation en CWS de tangage manuel.
TURB − à utiliser dans des conditions de turbulence pour réduire les charges de rafale.
ALT HOLD − maintient l'altitude-pression à l'altimètre du commandant au moment de la sélection de ce mode.
Sélecteur de mode de pilote automatique
Le sélecteur de mode de pilote automatique est un sélecteur rotatif situé du côté gauche du panneau de commande de mode du pilote automatique. Il a 4 positions: MAN, VOR/LOC, AUTO APP et MAN G/S. Le sélecteur est doté d'un ressort qui le met en position MAN, et est maintenu de manière électromagnétique aux 3 autres positions si les systèmes d'interverrouillage sont maintenus. Lorsque le mode de la chaîne de roulis change de ces 3 positions, le sélecteur retourne automatiquement à la position MAN. Une force supérieure à la force de surpassement élevée du CWS, une fois sur l'axe de VOR ou d'alignement de piste, fait revenir le sélecteur à la position MAN.
Chacun des modes de pilote automatique est décrit ci-dessous :
MAN − Le pilote automatique fonctionne en mode CWS de roulis manuel et est utilisé conjointement avec le sélecteur HDG pour obtenir les sous-modes de roulis suivants :
HDG HOLD, HDG SEL et HDG OFF. Le fonctionnement de ces sous-modes est décrit ci-dessous, sous Commutateur de cap du pilote automatique.
VOR/LOC − Le pilote automatique utilise le signal du VOR (radiophare omnidirectionnel VHF) ou du LOC (radiophare d'alignement de piste) sélectionné à la radio NAV pour commander la chaîne de roulis, et intercepte et suit automatiquement le LOC ou le VOR. Le HSI du commandant est utilisé pour sélectionner le cap et la route. Il y a compensation pour le vent traversier une fois sur l'axe.
AUTO APP − Le pilote automatique utilise le système d'atterrissage aux instruments (ILS) sélectionné à la radio NAV pour capter et suivre l'alignement de piste (chaîne de roulis) et l'alignement de descente (chaîne de tangage).
MAN G/S (alignement de descente manuel) – Le pilote automatique utilise l'ILS sélectionné à la radio NAV pour capter et suivre automatiquement l'alignement de piste (chaîne de roulis). Ce mode est utilisé pour capter manuellement l'alignement de descente au moyen du CWS de tangage d'au-dessus ou le recapter après le désembrayage du pilote automatique. Lorsque le mode est sélectionné, l'avion pique du nez pendant 10 secondes (700 pieds par minute), puis suit l'alignement de descente.
Commutateur de cap du pilote automatique
Le commutateur de cap a 3 positions. Il est doté d'un ressort qui le met en position centrale (HDG HOLD) et est maintenu de manière électromagnétique aux positions du haut (HDG OFF) et du bas (HDG SEL) si les systèmes d'interverrouillage sont maintenus. Chacun des sous-modes de cap est décrit ci-dessous :
HDG OFF – Le sous-mode de désactivation du cap est utilisé lorsque le pilote automatique est en mode CWS de roulis. Il maintient l'assiette latérale à l'intérieur des limites.
HDG HOLD − Le sous-mode de maintien de cap est obtenu lorsque l'axe de roulis est embrayé à un angle d'inclinaison inférieur à 5° ou lorsque le mode de navigation est sélectionné à la position MANUAL, le commutateur de cap est en position centrale (HDG HOLD), la commande de CWS est zéro et l'angle d'inclinaison est inférieur à 5°. Si la force d'une commande de CWS en roulis est supérieure à la force de surpassement, l'aéronef amorce un mouvement de roulis dans la direction de la force à un taux proportionnel à la force. Lorsque la force exercée au CWS est relâchée, la réponse de l'aéronef dépend de l'angle d'inclinaison au moment du relâchement. Si l'angle d'inclinaison est inférieur à 5°, l'aéronef revient les ailes à l'horizontale et maintient le cap; si l'angle d'inclinaison est supérieur à 5°, l'aéronef maintient l'angle d'inclinaison.
HDG SEL – Le sous-mode de sélection de cap utilise les données sur le cap sélectionné du curseur de cap au HSI du commandant et place la chaîne de roulis du pilote automatique à la force de surpassement élevée. Si la force de surpassement élevée est dépassée, le commutateur revient à la position centrale. En mode VOR/LOC, le commutateur revient à la position HDG HOLD lorsque la route sélectionnée est captée.
Pilotage transparent
Le volume 2 du manuel de vol (AOM) décrit le CWS comme suit [en anglais seulement]Footnote 176 :
CWS operates in low or high detent level, depending on which modes or submodes are active:
MAN Mode
CWS pitch and roll are low detent unless various submodes are active (see below)
VOR/LOC Mode
CWS pitch and roll are low detent until VOR or localizer ON COURSE. CWS roll then becomes high detent, and CWS pitch remains low detent unless ALT HOLD is active. CWS roll may be used to override during the capture phase until ON COURSE. Exceeding high detent in roll reverts the autopilot to MAN.
[…]
ALT HOLD Submode
CWS pitch is high detent. Exceeding high detent will revert the Pitch Mode Selector Switch to OFF.
HDG HOLD/HDG OFF Submodes
CWS roll is low detent.
HDG SEL Submode
CWS roll is high detent. Exceeding high detent causes the heading switch to move to the center (HEADING HOLD) position.
Annexe G – Aménagement du poste de pilotage de C-GNWN [en anglais seulement]
(se reporter à l'annexe X – Liste des acronymes et des abréviations)
Figure 23. Diagramme de l'aménagement du poste de pilotageFootnote 177
Annexe H – Système de directeur de vol FD-108 : renseignements complémentaires
Panneau de commande de mode de directeur de vol
Il y avait 2 panneaux de commande de mode de directeur de vol sur l'auvent : 1 pour le directeur de vol du commandant et l'autre pour le directeur de vol du P/O. Chaque panneau de commande de mode de directeur de vol contient des commandes pour la chaîne de roulis et la chaîne de tangage au moyen d'un sélecteur MODE SEL (sélection de mode), d'un interrupteur ALT HOLD (maintien d'altitude) et d'un bouton PITCH CMD (directives en tangage) (photo 9). Les commandes de roulis et de tangage sélectionnent les signaux fournis aux barres directrices de l'indicateur directeur d'assiette (ADI).
Photo 9. Panneau de commande de mode du directeur de vol
Les barres directrices de l'ADI affichent les commandes calculées pour maintenir l'angle de roulis sélectionné. Le sélecteur MODE SEL de roulis du directeur de vol comprend les positions et les limites opérationnelles suivantes :
GA (remise des gaz) fournit une commande en roulis du retour des ailes à l'horizontale avec une commande en tangage de 14° jusqu'à ce qu'on sélectionne un autre mode;
OFF retire les barres directrices de l'ADI;
HDG fournit des commandes aux barres directrices pour suivre le cap sélectionné au HSI. En mode HDG, la commande de direction est limitée à 30° en roulis et à 12° en tangage.
VOR/LOC sert à capter et à suivre un radial VOR ou un radiophare d'alignement de piste. VOR/LOC a 3 sous-modes :
Interception – voyant APD (indicateur de progression d'approche) VOR/LOC jaune allumé, les barres directrices fournissent des directives pour atteindre et maintenir le cap sélectionné au HSI.
Capture – voyant APD VOR/LOC vert allumé, les barres directrices fournissent des directives pour atteindre et maintenir le radial VOR ou l'alignement de piste sélectionné au HSI. Ces directives sont affichées sous forme d'angles d'inclinaison commandés. Les barres directrices retournent les ailes à l'horizontale une fois que le directeur de vol détermine que le cap résultant assure un angle d'interception suffisant pour la route sélectionnée. Dans le cas de l'alignement de piste, ce changement de mode se produit à 2,5È de l'axe d'alignement de piste. La commande d'angle d'inclinaison est limitée à ±30°.
Sur l'axe – voyant APD VOR/LOC vert allumé, les barres directrices fournissent des directives pour maintenir le radial VOR ou l'alignement de piste sélectionné au HSI. La commande d'angle d'inclinaison est limitée à ±8°, et le taux de roulis est limité à 7° par seconde.
AUTO APP comprend le mode VOR/LOC en plus d'une commande en tangage fournissant des directives verticales pour atteindre et maintenir l'alignement de descente.
La position MAN G/S sert à capter manuellement l'alignement de descente. La détection automatique du signal d'alignement de descente est désactivée.
Commande de mode de directeur de vol − tangage
Les barres directrices de l'ADI affichent les commandes calculées pour maintenir l'angle de tangage sélectionné. Le panneau de commande de mode a les commandes en tangage suivantes :
Interrupteur de maintien d'altitude – ON/OFF
Bouton PITCH CMD – sélectionne un angle de tangage fixe pour la montée ou la descente dans une plage de −10° à +15°.
Lorsque le sélecteur de roulis du panneau de commande de mode du directeur de vol est en position AUTO APP, le signal d'alignement de descente est utilisé pour commander le tangage.
Voyants annonciateurs d'indicateur de progression d'approche
Les APD fournissent les indications de l'état armé ou de capture des systèmes de pilote automatique et de directeur de vol selon différents modes de fonctionnement. Chaque APD comporte 1 colonne de voyants annonciateurs du côté gauche pour le directeur de vol et une deuxième colonne du côté droit pour le pilote automatique. Les APD ont été modifiés par rapport à la configuration d'origine pour inclure un voyant GPS dans le bas de la colonne du pilote automatique (figure 24).
Les 2 APD n'affichent pas nécessairement exactement les mêmes indications en tout temps, parce que chacun d'eux est connecté à des systèmes distincts et affiche de l'information de sources différentes. Par exemple, il se peut que le voyant APD VOR/LOC du directeur de vol du commandant soit vert lorsque le voyant APD VOR/LOC du directeur de vol du P/O est jaune, parce qu'un système peut avoir capté le faisceau d'alignement de piste tandis que le deuxième récepteur ne l'a pas encore capté en raison de légères variations de sensibilité de l'équipement.
Les modes de directeur de vol sont indiqués sur le côté gauche de l'APD. Sur l'avion en cause, les voyants suivants de l'APD s'appliquaient au système de directeur de vol :
VOR/LOC
Allumé de couleur jaune lorsque le mode VOR/LOC ou AUTO APP est sélectionné au panneau de commande de mode du directeur de vol.
Allumé de couleur verte lorsque le signal de VOR ou de LOC est capté (moins de 2,5° de l'axe d'alignement de piste).
GLIDE SLOPE
Allumé de couleur jaune lorsque le mode AUTO APP est sélectionné au panneau de commande de mode du directeur de vol.
Allumé de couleur verte lorsque le signal d'alignement de descente est capté (moins de 2 points).
GO AROUND
Allumé de couleur verte lorsque le mode GA est sélectionné.
Les modes du pilote automatique sont indiqués sur le côté droit de l'APD. Sur l'avion en cause, les voyants suivants de l'APD s'appliquaient au pilote automatique :
VOR/LOC
Allumé de couleur jaune lorsque VOR/LOC ou AUTO APP est sélectionné au panneau de commande de mode et que VOR ou LOC n'est pas capté.
Allumé de couleur verte lorsque VOR/LOC or AUTO APP est sélectionné au panneau de commande de mode et que le signal VOR ou LOC est capté (moins de 2 points).
GLIDE SLOPE
Allumé de couleur jaune lorsque le mode AUTO APP est sélectionné au panneau de commande de mode et que l'alignement de descente n'est pas capté.
Allumé de couleur verte lorsque le mode AUTO APP est sélectionné au panneau de commande de mode et que le signal d'alignement de descente est capté (moins de 2 points).
Allumé de couleur verte lorsque MAN G/S est sélectionné au MCP.
S'il est allumé de couleur verte, il passera au jaune lorsque l'écart de l'aéronef par rapport à l'alignement de piste est supérieur à 2 points.
GPS
Allumé de couleur verte lorsque GPS est sélectionné au tableau des voyants annonciateurs no 1 MD-41 et le sélecteur GPS du pilote automatique est réglé à A/P ON GPS.
Le voyant est éteint si l'un ou l'autre de ces sélecteurs est désélectionné.
Figure 24. Exemple d'indicateur de progression d'approche (APD)
NOTE : Puisque l'avion a quitté le faisceau d'alignement de piste, les résultats obtenus du calcul de l'alignement de descente sont mathématiques, ont été utilisés à titre d'illustration seulement et peuvent ne pas représenter ce qui aurait été indiqué sur les instruments de l'avion (étant donné que l'avion peut ne pas avoir été à portée de réception du signal de l'antenne).
Annexe P – Trajectoire de vol et alignement de piste
Annexe Q – Procédures d'exploitation du pilote automatique en mode MAN de First Air
Les procédures d'exploitation du pilote automatique en mode MAN dans le manuel d'exploitation de First Air sont les suivantes [en anglais seulement]Footnote 178 :
To Maneuver in Pitch and Roll
Use CWS at a force greater than low detent level. When CWS pitch force is relaxed below low detent level, airplane will maintain existing pitch attitude. When CWS roll force is relaxed below low detent level, if bank angle less than 5°, airplane will roll wings level and maintain heading. If bank angle greater than 5°, airplane will maintain bank angle.
To Maintain Bank Angles Less than 5°
Autopilot Heading Switch HDG OFF
When CWS roll force is relaxed below low detent level, the airplane maintains the existing bank angle. Return the Autopilot Heading Switch to center to remove this submode.
To Maneuver in Roll and Hold Altitude
Pitch Mode Selector ALT HOLD
Use CWS to induce roll at low detent level force. Altitude is maintained by input from the air data computer at the time Pitch Mode Selector is positioned to ALT HOLD position. CWS pitch input greater than high detent level will trip Pitch Mode Selector to OFF.
To Maneuver In Pitch and Hold Heading
Autopilot Heading Switch HDG SEL
Use CWS to control pitch attitude at low detent level. The airplane turns to and maintains the heading selected on HSI with the Autopilot Heading Switch in HDG SEL. CWS roll input greater than high detent level trips the Autopilot Heading Switch to the centre position.
Annexe R – Interception du système d'atterrissage aux instruments pour le pilote automatique en mode VOR/LOC
Interception du système d'atterrissage aux instruments pour le pilote automatique en mode VOR/LOC
Annexe T – Politique et procédures de First Air en matière d'exploitation des compas dans l'espace aérien intérieur du Nord
Politique d'exploitation dans l'espace aérien intérieur du Nord
La politique de First Air relative à l'exploitation dans l'espace aérien intérieur du Nord (NDA) est énoncée comme suit dans le manuel d'exploitation [en anglais seulement]Footnote 179 :
Navigation in Northern Domestic Airspace: Routes and approach procedures conducted in Northern Domestic Airspace are published degrees true.
Crews must navigate in accordance with the regulations and operating procedures outlined in this manual.
Crews will identify their tracks as “true” when broadcasting required MF [mandatory frequency] reports in uncontrolled airspace.
Be aware that other aircraft may or may not be adhering to the required operating practice.
Canadian Aviation Regulations require aircraft operating in Northern Domestic Airspace to be equipped with a means of establishing direction that is not dependant on a magnetic source. Even though First Air Aircraft are equipped with GPS, this alone is not capable of establishing direction.
There are only 2 reliable means of establishing direction. These are:
Use of GPS in combination with an ADF/NDB bearing; or, where this is not possible; and
Use of an Astro Compass and Air Almanac to obtain a sun/star shot.
Note: Use of the Astro Compass /Air Almanac should only be necessary when in an area without sufficient NDB coverage or when both GPS (one in HS748) are unserviceable.
Procédures permettant d'obtenir un cap vrai à l'aide du GPS et du radiophare non directionnel
Le manuel d'exploitation de l'aéronef fournit aux équipages de B737 des lignes directrices sous forme de procédures spécifiques pour l'exploitation des systèmes de compas et de navigation. Le manuel conseille ce qui suit [en anglais seulement] : « When operating in TRUE it is recommended that verification of TRUE heading be accomplished over each waypoint, before descent, and whenever verification is considered appropriateFootnote 180 » et « Comparing GPS data to RMI ADF indication can be used to set true heading but this may not be as accurate as using the astrocompassFootnote 181 ». Les procédures d'obtention du cap vrai au moyen du GPS et du NDB sont les suivantes [en anglais seulement]Footnote 182 :
Tune NDB, ensure strong signal and steady RMI ADF indication,
Key in NDB identifier on lower line display or use nearest function,
Ensure compass MAG/DG switch is DG,
Observe GPS BRG/D data, if BRG is not TRUE, select AUX FUNCTIONS (MSG then “↑” key), DISPLAY OPT and select TRUE.
Slew compass so the head of the ADF needle points to GPS displayed bearing to the NDB.
Note: The compass heading will correspond to present longitude
La description de la procédure mentionne que l'utilisation d'un NDB (radiophare non directionnel) et d'un ADF (radiogoniomètre automatique) pour obtenir un relèvement est moins précise que l'utilisation d'un astrocompas, et ce, en raison de différents facteurs qui peuvent diminuer la précision du NDB et de l'ADF.
Annexe U – Procédures des listes de vérifications développées de First Air
Liste de vérifications avant descente développée
La liste de vérifications avant descente développée fournie dans le manuel de vol (AOM) de First Air est la suivante [en anglais seulement]Footnote 183 :
Landing Data & Briefing REVIEWED, BUGS SET PF/PNF
Complete the landing data card, conduct crew and approach plate briefings and set all bugs for landing.
EPR & IAS Bugs CHECKED & SET VREF___ PF/PNF
Verify the airspeed index markers and the EPR cursors are set to the landing data card values.
Compasses SYNC, MAG/DG & X CHECKED PF/PNF
Verify all compass systems have been checked, are synchronized and have been cross-checked. Verify that compass systems are in MAG. (Magnetic or Slaved Position) or DG (free Gyro).
NOTE: 10,000 feet - Landing/Turnoff lights On.
During Daylight operations, the Runway Turnoff and Inboard Landing lights should be on pulse mode.
Use of outboard landing lights are at the Captain's discretion. Due to the increased drag and fuel burn, their use should be limited to the traffic pattern at night and/or to speeds below 250 knots.
During night or obscured weather operations, Turnoff, Inboard and Outboard Landing Lights should be used for landing. The Inboard and Outboard Landing Lights should be turned on no later than the FAF.
Liste de vérifications en approche développée
Les éléments au-dessus de la ligne pointillée sont normalement effectués en franchissant les 10 000 pieds en descente, et les éléments sous la ligne pointillée sont effectués après le réglage des aides à la navigation et des directeurs de vol, selon l'exposé, en vue de l'approche prévue.
La liste de vérifications en approche développée fournie dans l'AOM est la suivante [en anglais seulement]Footnote 184 :
Seat Belt ON PNF
Anti-Ice (as required) ON/OFF PNF
Gravel Protect Switch ON PNF
Air Cond & Pressurization SET FOR LANDING PNF
Check cabin temperature normal. If landing airport temperature is higher or lower than normal, cabin should be pre-conditioned on descent to maintain appropriate cabin temperatures on the ground.
Check that the OFF SCHED DESCENT annunciator is extinguished.
Check that the cabin is descending to the arrival airport elevation.
APU START
If required, start APU. Configure the pressurization system for Engine Bleeds OFF for landing:
1. Right Pack Switch ON
2. Isolation Valve CLOSED
3. Left Pack Switch ON
4. Number 1 Engine Bleed Switch OFF
5. APU Bleed Switch (60 seconds after APU start) ON
6. Number 2 Engine Bleed Switch OFF
Nav Switches VHF/FMS NAV PF/PNF
Altimeters Instruments & Radios "___" SET & CROSS-CHECKED PF/PNF
Verify the altimeter cursors and barometric corrections are set at the correct settings, and the altimeters cross-check.
Liste de vérifications avant l'atterrissage développée
La liste de vérifications avant l'atterrissage développée fournie dans l'AOM est la suivante [en anglais seulement]Footnote 185 :
Engine Start Switches ON PF
Recall CHECKED PF
The PNF will press and release the annunciator panel. Check that the annunciator panel lights and MASTER CAUTION lights illuminate. No lights should remain illuminated when the annunciator is released.
Speed Brake ARMED, GREEN LIGHT PF
Raise lever, move slightly aft to DETENT (ARM) position and observe SPEEDBRAKE ARMED annunciator illuminated.
If the amber SPEEDBRAKE DO NOT ARM light illuminates, or the green SPEEDBRAKE ARMED light does not illuminate, return the lever to DETENT and manually deploy the ground spoilers after touchdown.
Gear DOWN, 3 GREEN PF/PNF
Verify the landing gear lever is positioned down and the 3 green landing gear down and locked indicator lights are illuminated.
Flaps ___ GREEN LIGHT PF/PNF
Ensure flap indication agrees with required landing flap.
Annexe V – Procédures d'utilisation normalisées supplémentaires et adaptations par les équipages de First Air
Transfert des commandes
Le manuel de vol (AOM) décrit la procédure de transfert des commandes de l'entreprise comme suit [en anglais seulement]Footnote 186 :
When transferring control of the aircraft, the PFFootnote 187 will state “Your Controls”. The PNF will state “My Controls” and assume PF duties. The PNF will grasp the control column prior to announcing “My Controls” if the auto-pilot is not engaged at time of control transfer.
Des entrevues avec des pilotes ont révélé que la conformité à cette procédure était bonne en général, même s'il y avait parfois des adaptations en croisière, où on utilisait des signaux manuels ou une tape sur le volant de commande pour signifier le transfert des commandes. Durant le vol FAB6560, il y a eu un transfert des commandes en croisière, mais il n'y a pas eu de déclarations verbales au sujet des transferts des commandes.
Carte des paramètres d'atterrissage et réglage du curseur de vitesse
Figure 25. Carte des paramètres d'atterrissageFootnote 188
La carte des paramètres d'atterrissage (figure 25) sert à régler et à vérifier les paramètres d'atterrissage. Normalement, le PNF la remplit avant les procédures avant descente normales. Il examine aussi les renseignements de la carte des paramètres d'atterrissage après le réglage des curseurs de vitesse et avant l'exposé d'approche.
La procédure d'utilisation normalisée de First Air pour le B737 consiste à voler à la vitesse d'approche finale (VAPP) recommandée, soit la VREF corrigée en fonction du vent. La correction pour le vent est ½ la composante vent de face régulier, plus la valeur rafale totale, selon les vents signalés par la tour. La correction maximale pour le vent ne doit pas dépasser 20 nœuds. Cette correction pour le vent est ajoutée à la VREF. En situation de vent léger ou de vent arrière, un minimum de 5 nœuds est ajouté à la VREF pour obtenir la VAPP.
Les réglages de l'index de vitesse (curseur) recommandés sont décrits à la figure 26. L'AOM indique présente les renseignements suivants [en anglais seulement]Footnote 189 :
After the aircraft has been configured for landing with the gear down and landing flap. [sic] All airspeed callouts will be referenced to the airspeed internal Bug (“The Bug”) E.g. “Bug +5 or Bug –5”.
Figure 26. Anémomètre du B737 (avec légende reproduite sous le diagramme)Note de bas de page 191
One External Bug at 210 knotsFlaps UP manoeuvring speed
Annonces d'altitude
Des annonces d'altitude normalisées sont requises lorsqu'on quitte une altitude pour une autre, et à chaque intervalle de 10 000 pieds. Lorsque l'aéronef quitte une altitude pour une autre, le PF doit annoncer « Out of (altitude) for (altitude) » [traduction : quittons (altitude) pour (altitude)], et le PNF répond par « Check » [traduction : compris]. À chaque intervalle de 10 000 pieds, le PNF doit annoncer « (altitude) for (assigned altitude) » [traduction : (altitude) pour (altitude assignée)].
Des entrevues avec des pilotes ont révélé une conformité variable avec ces annonces. Certains pilotes ont déclaré qu'ils utilisaient une phraséologie non standard et parfois des signaux manuels lorsqu'on utilisait les radios.
Ni l'un ni l'autre des pilotes du vol FAB6560 n'a fait d'annonce verbale d'altitude au moment d'amorcer la descente à partir du FL310 à 16 h 23 min 40 s. Il n'y a pas eu d'annonce au FL300. À 16 h 28 min 43 s, le commandant a fait une annonce d'altitude non standard au FL200, mais il n'a pas précisé à quelle altitude il descendait. Cette annonce a été faite 4 secondes après que le vol a franchi le FL200 en descente. À 16 h 33 min 14 s, un des pilotes a fait une annonce d'altitude non standard à 10 000 pieds, mais n'a pas précisé à quelle altitude il descendait. Cette annonce a été faite 39 secondes après que le vol est descendu sous les 10 000 pieds.
Transition de descente
Le vol FAB6560 évoluait dans la région d'utilisation de la pression standard, de l'altitude de croisière jusqu'au sol. Dans cette région, l'altimètre doit être réglé au calage altimétrique en vigueur de l'aérodrome d'atterrissage prévu avant d'amorcer la descente avec l'intention d'atterrir. Dans la partie sud du pays, les altimètres sont réglés au calage altimétrique en vigueur lorsque le vol entre dans la région de calage altimétrique en descendant sous le FL180Footnote 192.
Les vérifications de transition par balayage sont amorcées pendant la descente au niveau de transition. Les éléments requis sont la réinitialisation des altimètres du commandant, du P/O et de secours et la graduation de réglage barométrique du panneau de conditionnement de l'air au calage altimétrique local. L'annonce normalisée du PNF pour le niveau de transition est : « Transition level altimeters reset ___ in » [traduction : réinitialisation d'altimètres au niveau de transition ____ po]. Aucune discussion relative au calage altimétrique n'a été enregistrée avant ou durant la descente du vol FAB6560 jusqu'à 16 h 28 min 49 s, lorsque le commandant a annoncé le calage altimétrique en vigueur pour CYRB, soit 29,81 pouces de mercure. À ce moment, le vol descendait sous le FL196. Le PNF n'a pas utilisé la phraséologie requise pour le niveau de transition.
Radios de communication
Un pilote doit aviser l'autre pilote lorsqu'il n'est pas à l'écoute de la radio principale. L'autre pilote doit accuser réception de cette information et maintenir une écoute permanente. Lorsque le pilote revient de nouveau à l'écoute, il doit être informé des modifications à la route autorisée et des changements apportés à la radio VHF principale.
Des entrevues avec des pilotes ont révélé que la conformité avec cette procédure était bonne en général, même si parfois des signaux manuels étaient utilisés dans des situations de lourde charge de travail. Durant le vol FAB6560, le P/O a effectué verbalement le transfert d'écoute radio avec le commandant avant et après l'exposé aux passagers par le système de sonorisation à 16 h 21 min 6 s. À 16 h 28 min 37 s, lorsque le P/O a changé de radio pour appeler la base de l'entreprise à CYRB, il n'y a pas eu de transfert verbal de l'autre radio avant ou après la communication.
Vérifications par balayage de 15 000 et 10 000 pieds
Les vérifications par balayage de 15 000 pieds sont amorcées en franchissant les 15 000 pieds en descente. La seule mesure pour le PNF est de démarrer l'APU (groupe auxiliaire de bord) si un atterrissage sans prélèvement d'air est prévu. Le vol FAB6560 est descendu sous les 15 000 pieds à 16 h 30 min 16 s. Aucune déclaration n'a été enregistrée relativement au démarrage de l'APU.
Les vérifications par balayage de 10 000 pieds sont amorcées au moment de franchir les 10 000 pieds en descente. Le PNF prend les mesures comme suit [en anglais seulement]Footnote 193 :
Logo LightON
Gasper FanON
Air Cond & PressurizationSET FOR LANDING
If required, configure the pressurization system for Engine Bleeds OFF for landing. Note de bas de page 194 Ensure that the APU has been operating for at least 60 seconds before completing this procedure.
Right Pack SwitchON
Isolation ValveCLOSED
Left Pack SwitchON
Number 1 Engine Bleed SwitchOFF
APU Bleed SwitchON
Number 2 Engine Bleed SwitchOFF
Seat Belt SignON
Gravel Protect Switch (if installed)ON
Landing LightsAS REQUIRED
Le vol FAB6560 est descendu sous les 10 000 pieds à 16 h 32 min 35 s. Au début de la vérification en approche à 16 h 32 min 48 s, le P/O a confirmé que les voyants ceintures de sécurité étaient allumés, que le déflecteur de gravier était activé et que la climatisation et la pressurisation étaient réglées en vue de l'atterrissage. Cette confirmation indique qu'on avait terminé les vérifications par balayage de 10 000 pieds.
Les renseignements disponibles n'indiquent pas clairement si les pilotes avaient démarré l'APU. Cependant, ils ont activé le commutateur du déflecteur de gravier, indiquant qu'ils étaient conscients des exigences d'exploitation relativement à une piste gravelée. Selon toute probabilité, ils ont effectivement démarré et utilisé l'APU.
Avertisseur d'altitude
Le PNF doit accuser réception de toutes les assignations d'altitude de l'ATC et les répéter à voix haute au PF. Toutes les altitudes assignées jusqu'à l'altitude au repère d'approche finale (FAF) doivent être présélectionnées à l'avertisseur d'altitude. Lorsque l'alignement de descente est capté, l'avertisseur d'altitude doit être préréglé à l'altitude d'approche interrompue. Rien n'oblige les pilotes à accuser réception des alertes d'altitude sonores ou visuelles.
On a interrogé les pilotes seulement au sujet de l'accusé réception des alertes d'altitude sonores sous l'altitude sélectionnée en approche finale. Ils ont indiqué qu'ils accusaient réception de telles alertes sonores en avisant l'autre pilote que l'avertisseur d'altitude était réglé à l'altitude d'approche interrompue.
Dans le cas du vol FAB6560, le PNF n'a pas répété à voix haute l'altitude voulue lorsqu'il a initialement reçu de l'ATC l'autorisation de descendre à 16 h 23 min 29 s. Aucun signal sonore de l'avertisseur d'altitude n'a été enregistré jusqu'à ce que l'avion descende sous les 3200 pieds à 16 h 39 min 10 s. Cela correspondait au réglage de l'avertisseur d'altitude à 2200 pieds. Il y a eu une alerte subséquente à 16 h 39 min 52 s lorsque l'avion était en descente à environ 1950 pieds asl.
Annexe W − NOTAM
NOTAMFootnote 195 initial pour établir la MTCA et la zone de contrôle de classe D, publié le 2 août 2011 :
Issued 02 August 2011 at 1730Z:
PNS0506 02173032 GG CYZZOZEG 021730 CYHQYNYX
111404 NOTAMN CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE MTCA IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 80 NM RADIUS 744301N 945810W
700 FT AGL TO FL200. FOR OPS NANOOK.
FREQ FOR OPS NANOOK:
RESOLUTE TML: 228.5000 MHZ
: 123.075 MHZ
GLOWWORM (MIL PAR): 243.4000 MHZ
: 128.850 MHZ
RESOLUTE TWR: 236.5000 MHZ
: 123.325 MHZ
RESOLUTE GND: 249.9000 MHZ
: 128.975 MHZ
: 149.150 MHZ
1108061200 TIL 1108280100
Issued 02 August 2011 at 1735Z:
PNS0512 02173523 GG CYZZOZEG 021735 CYHQYNYX
111405 NOTAMN CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE CTL ZONE IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 10 NM RADIUS 744301N 945810W
SFC TO 6000 FT MSL. FOR OPS NANOOK
1108061200 TIL 1108280100
NOTAM révisé pour établir la MTCA et la zone de contrôle de classe D, publié le 4 août 2011 :
Issued 04 August 2011 at 2000Z:
PNS0636 04200001 GG CYZZOZEG 041959 CYEGYFYX
111424 NOTAMR 111404 CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE MTCA IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 80 NM RADIUS 744301N 945810W
700 FT AGL TO FL200. FOR OPS NANOOK.
FREQ FOR OPS NANOOK:
RESOLUTE TML: 228.5000 MHZ
: 123.075 MHZ
GLOWWORM(MIL PAR): 243.4000 MHZ
: 128.850 MHZ
RESOLUTE TWR: 236.5000 MHZ
: 123.325 MHZ
RESOLUTE GND: 249.9000 MHZ
: 128.975 MHZ
: 149.150 MHZ
1108101300 TIL 1108280100
. . . .
Issued 04 August 2011 at 2006Z:
PNS0644 04200613 GG CYZZOZEG 042006 CYEGYFYX
111425 NOTAMR 111405 CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE CTL ZONE IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 10 NM RADIUS 744301N 945810W
SFC TO 6000 FT MSL. FOR OPS NANOOK
1108101300 TIL 1108280100
NOTAM révisé pour établir la zone de contrôle de classe D, publié le 12 août 2011 :
Issued 12 August 2011 at 2331Z:
PNS0810 12233157 GG CYZZOYRB 122331 CYHQYNYX
110102 NOTAMN CYRB RESULUTE BAY
CYRB DAH IS AMENDED AS FLW:
CLASS D RESOLUTE CTL ZONE IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 10 NM RADIUS 744301N 945810W
SFC TO 6000 FT MSL. FOR OPS NANOOK
1108101300 TIL 1108280100
Annexe X – Liste des acronymes et des abréviations
8 ECCA
8e Escadron de transmission et de contrôle (AIR)
ACC
centre de contrôle régional
ADF
radiogoniomètre automatique
ADI
indicateur directeur d'assiette
agl
au-dessus du sol
ALT HOLD
maintien d'altitude
AOM
manuel de vol
AP
pilote automatique (interrupteur désigné comme A/P)
APD
indicateur de progression d'approche
APU
groupe auxiliaire de bord
asl
au-dessus du niveau de la mer
ASR
radar de surveillance de zone
ATC
contrôle de la circulation aérienne
ATIS
service automatique d'information de région terminale
AUTO APP
approche automatique
AWWS
site Web de la météorologie à l'aviation
°C
degré Celsius
CAA
Civil Aviation Authority du Royaume-Uni
CADORS
Système de compte rendu quotidien des événements de l'aviation civile
CARS
station radio d'aérodrome communautaire
CB
Cambridge Bay
CDU
panneau de commande et d'affichage
CFIT
impact sans perte de contrôle
CVFR
vol VFR contrôlé
CN
consigne de navigabilité
CRAC
Comité de réglementation de l'Aviation civile
CRM
gestion des ressources en équipe
CRMI
instructeur de CRM
CRMIE
examinateur d'instructeur de CRM
CVR
enregistreur de conversations de poste de pilotage
CWS
pilotage transparent
CYRB
aéroport de Resolute Bay (indicatif de l'Organisation de l'aviation civile internationale [OACI])
CYUX
Hall Beach
CYZF
aéroport de Yellowknife
CZ
zone de contrôle
DG
conservateur de cap
DME
équipement de mesure de distance
EGPWS
système d'avertissement de proximité du sol amélioré
ELT
radiobalise de repérage d'urgence
EPR
rapport de pression moteur
ESTAP
point de cheminement de navigation par GPS
ETA
heure d'arrivée prévue
EUROCAE
Organisation européenne pour l'équipement électronique de l'aviation civile
FAA
Federal Aviation Administration des États-Unis
FAB6560
vol 6560 de First Air
FAF
repère d'approche finale
FDM
suivi des données de vol
FDR
enregistreur de données de vol
FL
niveau de vol
FMS
système de gestion de vol
FOM
manuel d'exploitation de First Air
FOTM
First Air Flight Operations Training Manual
GECA
gestion expéditionnaire de la circulation aérienne
GNSS
système mondial de navigation par satellite
GPS
système de positionnement mondial
GPWS
dispositif avertisseur de proximité du sol
HSI
indicateur de situation horizontale
ILS
système d'atterrissage aux instruments
IMC
conditions météorologiques de vol aux instruments
IRB
indicatif de 3 lettres de l'émetteur du système d'atterrissage aux instruments de Resolute Bay
JRCC
centre conjoint de coordination de sauvetage
KIAS
vitesse indiquée exprimée en nœuds
KTAS
vitesse vraie en nœuds
LOC
alignement de piste
LOSA
audit de sécurité en service de ligne
MAG
magnétique
MAN
manuel
MANOPS ATC
Manuel d'exploitation du contrôle de la circulation aérienne
°M
degrés magnétiques
METAR
message d'observation météorologique régulière pour l'aviation
MF
fréquence obligatoire
MODE SEL
sélection de mode
MTCA
région de contrôle terminal militaire
MUSAT
point de cheminement de navigation par GPS
nav-aid
aide à la navigation
NDA
espace aérien intérieur du Nord
NDB
radiophare non directionnel
nm
mille marin
NOTAM
avis aux navigants
NOTAMC
annulation d'un NOTAM
NOTAMN
nouveau NOTAM
NOTAMR
NOTAM de remplacement
NSAC
Normes de service aérien commercial
NTSB
National Transportation Safety Board des États-Unis
OACI
Organisation de l'aviation civile internationale
OTNEL
point de cheminement de navigation par GPS
PAR
radar d'approche de précision
PACE
stratégie de communication des membres d'un équipage dans le cadre de laquelle les pilotes font preuve d'assertivité progressive (probing, alerting, challenging, and emergency warning)
vitesse d'approche (VREF) corrigée en fonction du vent
VFR
règles de vol à vue
VHF
très haute fréquence
VMC
conditions météorologiques de vol à vue
VOR
radiophare omnidirectionnel VHF
VREF
vitesse d'approche
VTT
véhicule tout-terrain
YRB
aéroport de Resolute Bay (indicatif de l'Association du Transport Aérien International)
2.0 Analysis
2.1. Introduction
Based on available records, the pilots were certified and qualified for the flight in accordance with existing regulations. The investigation determined that there was nothing to indicate that the performance of the captain or the first officer (FO) was degraded by fatigue or physiological factors.
On this flight, the localizer was not captured, and the flight continued on a heading that progressively deviated to the right of the localizer. As the aircraft deviated to the right, despite instrument indications that the flight was substantially off the localizer centreline and a number of attempts by the FO to communicate the hazard, the captain continued the approach. Additionally, the approach was unstable in several parameters, and the flight continued beyond the point at which a go-around should have been conducted in accordance with company policy. A ground proximity warning system (GPWS) warning prompted the crew to initiate a go-around, but this action was initiated too late to avoid impact with terrain.
This analysis will focus on the following:
Why the aircraft did not capture the localizer and glideslope;
The effect of compass errors;
Aircraft navigational equipment;
Why the captain believed that the aircraft had captured the localizer;
Why the crew were unable to reconcile their differing awareness of the situation;
Why the captain continued the approach; and
Adaptations of SOPs.
2.2. FAB6560 approach planning
After First Air flight 6560 (FAB6560) had departed from Yellowknife (CYZF), the ceiling and visibility at Resolute Bay (CYRB) had fluctuated as low as 200 feet and ½ statute mile (sm), although the 1600 weather observation reported 10 miles visibility and overcast ceiling at 700 feet. The wind was from the south, favouring Runway 17T. The weather conditions at CYRB during the arrival of FAB6560 were such that a visual approach was not possible and an instrument approach was required.
Carrying out an approach to Runway 17T would take more time and fuel, as well as requiring a non-precision approach rather than an instrument landing system (ILS) approach. The tailwind was within aircraft limitations, and the ILS Runway 35 True (35T) would save time and fuel with a straight-in approach. Furthermore, the ILS is a precision approach, which involves lower risk and less workload than a non-precision approach. The straight-in ILS 35T provided many benefits, with only an in-limits tailwind as a negative factor.
Before commencing descent, the captain advised the FO that he planned to use area navigation (RNAV)Footnote 153 to navigate to the localizer and then switch from global positioning system (GPS) to VHF NAV (very high frequency navigation). The investigation determined that the plan to transition from en-route navigation to approach can be interpreted in 2 different ways.
First, the captain may have intended to employ a non-standard method to use the GPS to align the aircraft with the localizer on final approach, and then switch to VHF NAV. Second, the captain may have intended to use the GPS to navigate to a point just before MUSAT waypoint, where the switch to VHF NAV would occur.
Although the captain's approach briefing provided information as to approach speeds and some minimum altitudes, the briefing did not include information regarding the intended nav-aid configuration during the approach or minimum safe altitudes during the arrival phase. The captain's approach briefing was non-standard and incomplete.
The consequence of an abbreviated approach briefing is that a crew may not be adequately prepared for the approach. Additionally, one of the main purposes of briefings is to ensure that both pilots have the same expectations and foundation for shared situational awareness.
2.3. Descent initiation and management
At about 150 miles to CYRB, before commencing descent, the FO pointed out to the captain that their ground speed was high. The high ground speed was due to the tailwind component at cruising altitude.
The captain indicated that he would commence descent at 105 nautical miles (nm) from CYRB. This communication indicates that the captain was aware of the effect of the tailwind and had considered it in his descent planning (100 nm with zero wind at top of descent [TOD], plus a correction for wind). However, the 5-nm correction that the captain had applied was less than the 17-nm adjustment actually required to compensate for the 63-knot tailwind.
At 1622:16, the FO requested descent clearance. At this time, the aircraft was about 112 nm from touchdown at CYRB. The descent clearance was issued at 1623:29, at which time the aircraft was about 103 nm from touchdown. Descent began at 1623:40 and 101 nm from touchdown, closer to CYRB than the captain had planned for and 16 nm closer than required for the wind.
Until commencing descent, the autopilot pitch mode selector was likely in ALT HOLD (altitude hold) to maintain the cruise altitude. To initiate descent, the captain would have selected the autopilot pitch mode selector to OFF. The autopilot pitch channel would then operate in manual pitch CWS (control wheel steering) at the low detent (5 pounds). In this mode, the autopilot would maintain the pitch attitude set by the pilot using the control column.
The late initiation of descent resulted in the aircraft being high on the descent profile. The excess height could have been corrected in several ways:
By increasing rate of descent and airspeed;
By making a 360° turn;
By adjusting the localizer intercept point from MUSAT to a point further away from the runway; or
By use of speed brakes.
The captain maintained track toward MUSAT, and increased airspeed and descent rate. Consequently, the flight descended through 10 000 feet at 310 knots indicated airspeed (KIAS), well in excess of the 250-KIAS speed limit. With regard to the threat-and-error management model, the excessive airspeed was an undesired aircraft state.
The captain reduced airspeed to 184 KIAS by the time the flight began the turn onto final approach. This speed was within normal operating parameters for this phase of flight, and did not prevent the crew from configuring the aircraft. The aircraft was about 600 feet above the nominal descent profile.
The late initiation and subsequent management of the descent resulted in the aircraft turning onto final approach at a higher altitude than desired. These factors increased the crew's workload and reduced their capacity to assess and resolve navigational issues during the remainder of the approach.
2.4. Compass operations
2.4.1. Heading comparator
Illumination of the heading comparator would almost certainly result in discussion between the pilots about the comparator. Other than when completing the compass portion of the in-range check at 1625:07, the pilots did not discuss the compasses, heading, or heading comparator during the recorded portion of the flight. Therefore, both compass systems were almost certainly operating within the specified heading comparator parameters.
With wings level, the heading comparator should illuminate when the headings differ by 6° ±2°. The ±2° tolerance means the 6° heading-difference parameter could be as little as 4° or as much as 8°. Without illumination of the heading comparator, it is likely that the pilots would consider any heading difference to be insignificant, and possible that it might not be perceived. The complete absence of any discussion about a heading split indicates that if a heading split did exist, it was within the comparator threshold parameters and the pilots either considered it insignificant or were unaware of it. The maximum heading difference between the no. 1 and no. 2 compass systems during flight FAB6560 likely did not exceed 8° with wings level.
Physical examination of the compass controllers was inconclusive.
The investigation considered whether the compass controllers were set to magnetic (MAG), because operation in MAG would result in significant heading changes because of the proximity of the magnetic north pole to the track of FAB6560. Radar data show that FAB6560 was tracking 037°T when the crew re-slaved the compasses at 1625:07. Calculations were done to determine the likely setting of the compass controllers based on the recorded compass heading, radar data, and wind drift. The recorded heading is not congruent with the compass controllers being set to MAG.
The flight data recorder (FDR) data show only the one instance of compass adjustment, at 1625:07. At about the same time, during the pre-descent check, both pilots responded with “DG” (i.e., directional gyro) to the compass challenge. It is likely that the pilots selected the switch on both compass controllers to the DG position when the compasses were initially switched from MAG to DG at an undetermined time, before the commencement of valid FDR data at 1458:57.5.
2.4.3. Compass controllers hemisphere selection
While operating in DG, inadvertent selection of the hemisphere switch on one controller to N and on the other controller to S would result in the 2 compasses developing a significant heading difference fairly quickly. Such a heading difference would also quickly trigger the heading comparator. Because there was no discussion between the pilots about the comparator, it is likely that both hemisphere switches were set to the same position.
First Air aircraft operate in the northern hemisphere; consequently, deliberate selection of S on the hemisphere switch is extremely unlikely. Therefore, it is very likely that both hemisphere switches were set to N.
2.4.4. Compass controller latitude compensators
The compasses were required to be set to DG when FAB6560 entered the Northern Domestic Airspace at RIBUN waypoint. While the investigation could not determine when the compasses were set to DG, further discussion will be based on the premise that it occurred at RIBUN.
FAB6560 crossed both latitudes 66°N and 68°N before reaching Cambridge Bay (CB). The compass controller latitude compensators were found set at 68° (no. 1) and 66° (no. 2). While physical examination could not determine the position of the latitude compensators at impact, their positions as found are reasonable given the track of flight FAB6560 and the company's operating procedures and practices. It is likely that these settings were made by the FAB6560 crew.
2.4.5. Real precession
Given the heading change rates recorded with the wings level, it is likely that the heading comparator would have illuminated if one DG had excessive real precession. However, the pilots did not mention or discuss illumination of a heading comparator. It is very unlikely that both DGs would simultaneously experience real precession of the same magnitude and direction, thereby preventing the comparator threshold from being exceeded. Therefore, it is considered unlikely that real precession was the sole cause of the heading drift identified in the FAB6560 FDR data. It is impossible to isolate real precession from apparent precession in the recorded heading data; therefore, further analysis will be based on the premise that the real precession did not exceed the ±1° per-hour tolerance.
2.4.6. Earth rate precession
With the no. 2 compass controller set to DG and 66°N latitude, torque would have been applied to the no. 2 DG to correct for earth rate at 6°N. However, some residual earth rate (i.e., difference between earth rate at the current latitude and earth rate at the latitude selected) would exist. The effect of earth rate was examined for 2 periods: 1458:57.5 to 1548:25 (commencement of valid data until turn at CB) and 1549:13 to 1612:00 (turn at CB until turn at 72° N, 100° 45′ W).
During the 2 periods examined, which exhibited recorded heading drift of 25° per hour, the residual earth rate varied from −0.54° per hour to 0.22° per hour. It is very unlikely that uncorrected earth rate precession was the sole cause of the recorded heading drift.
2.4.7. Earth transport rate precession
The C-11B compass system does not incorporate any means to correct for earth transport rate. The effect of earth transport rate was examined for 2 periods: 1458:57.5 to 1548:25 and 1549:13 to 1612:00.
During the 2 periods examined, which exhibited recorded heading drift of 25° per hour, the residual earth transport rate varied from −8.51° per hour to −9.34° per hour. It is very unlikely that uncorrected earth transport rate precession was the sole cause of the recorded heading drift.
2.4.8. Precession summary
The sum of the maximum values discussed above for real precession (1° per hour), residual earth rate (0.54° per hour), and uncorrected earth transport rate (9.34° per hour) is 10.88° per hour. However, during the 2 periods discussed above, the recorded heading from the no. 2 compass drifted at 25° per hour. Therefore, the recorded no. 2 compass drift differs substantially from total calculated precession. The differing direction and magnitude of the heading drift observed, in conjunction with the number of turns made by the aircraft, makes it impossible to draw conclusions regarding the effect of real and apparent precession on the compass systems during the final 17 minutes of the flight.
2.4.9. No. 1 and no. 2 compass systems behaviour
Because of the absence of any pilot discussion about the heading comparator, it was earlier concluded that the maximum heading difference between the compass systems during flight likely did not exceed 8° with wings level. This means that both compass systems were in agreement within comparator tolerances, and would have been so even during the period when the recorded no. 2 compass heading was drifting significantly. Therefore, it is likely that the no. 1 compass system was also drifting, but within the comparator heading difference threshold.
The heading drift recorded on the FDR is not consistent with normal compass operation. Despite extensive consultation with Boeing, Honeywell, Western Avionics, First Air, and the Royal Canadian Air Force (RCAF) School of Air Navigation, the investigation was unable to determine why this compass behaviour occurred.
2.4.10. Compass error
This section contains discussion of true north (T) headings, bearings, and tracks, as well as the recorded erroneous heading and expected resultant instrument indications. Values not specifically identified as true north relate to the erroneous indications the compass system provided.
The crew almost certainly used the GPS/non-directional beacon (NDB) method of adjusting the compasses. The Resolute Bay non-directional beacon (RB NDB) was the only usable beacon within range. Entering the RB NDB identifier in the GPS should have resulted in a bearing of 029°T from the current aircraft position to RB NDB.
Radar and wind data show that the aircraft was tracking 037°T to MUSAT with no wind drift. The correct post-procedure radio-magnetic indicator (RMI) indications, assuming no NDB/ADF (automatic direction finding) error influence, should have been ADF bearing pointer head at 029°T, with the resultant true heading 037°, under the lubber line (Figure 12).
However, on completion of the procedure, the recorded heading from the no. 2 compass was 029°, which indicates that the RMI lubber line heading should also have been 029°. Therefore, the indicated bearing to the RB beacon displayed to the crew on the FO's RMI should have been 021° (Figure 13).
Figure 12. 1625:07: Exemplar of first officer (FO) radio-magnetic indicator (RMI) (no. 2 compass), showing expected true indications with no heading error
On completion of the heading setting procedure, the heading should have been 037°T. The recorded heading was 029°, an error of −8°. At least 2 reasons for this error were possible. First, it is possible that the pilots incorrectly executed the final step in the procedure, setting the bearing to RB NDB, 029°, under the lubber line rather than the head of the ADF pointer. Second, it is possible that the heading setting was affected by inaccuracies inherent to the ADF/NDB system. Either scenario is considered equally likely.
The consequence of the heading setting error was that, immediately after the procedure was completed, the crew heading indication for the no. 2 compass was incorrectly depicted as 029° rather than 037°T.
Wind triangle calculations for 1638:00 indicate that the heading required for the aircraft to track 038°TFootnote 154 is 039°T, while the recorded heading was 024°. This difference means that the heading error had increased to about −15°.
Wind triangle calculations for 1640:35 show that the heading required for the aircraft to track 351°TFootnote 155 is 348°T, while the recorded heading was 331°. This difference means that the heading error had increased to about −17°.
An error introduced when the compasses were initially adjusted, combined with subsequent compass drift, resulted in a compass error of −17° during final approach. At 1640:35, the calculated actual aircraft heading was 348°T, while the recorded no. 2 heading was 331°.
2.5. In-range check
Until this point in the flight, the captain likely had the aircraft configured for GPS navigation. This configuration required the following selections:Footnote 156
Captain and FO MD-41 − on GPS
A/P SELECT annunciator/switch − GPS selected
Autopilot in MAN mode
Heading switch on HDG SEL
Flight directors in HDG
HSI course set to current GPS track
At 1636:23, the captain called for the below-the-line portion of the in-range checklist. Following the FO's challenge for the NAV (navigation) switches, both pilots responded “VHF NAV.” Therefore, it is likely that both pilots selected their respective MD-41 to NAV at this time. Doing so would change the HSI display from GPS to NAV, and would also remove the GPS signals from the autopilot. Other selections that would normally be made by the crew at this time are as follows:Footnote 157
Autopilot to VOR/LOC
Autopilot pitch mode selector remains OFF
A/P SELECT annunciator/switch − GPS deselected
Heading switch to HDG SEL
Flight directors to AUTO APP
HSI course selector turned to 347 (localizer inbound track)
Company pilots rarely used the autopilot AUTO APP or MAN G/S (manual glideslope) modes for ILS approaches, instead preferring to use VOR/LOC mode to track the localizer and CWS pitch inputs to follow the glideslope. Consequently, it is almost certain that AUTO APP or MAN G/S were not selected at this time.
2.6. Navigational modes during turn onto final approach
2.6.1. General
Radar ground speed on the inbound track to MUSAT immediately before the turn began was 229 knots. It is unlikely that this speed prevented the autopilot from capturing the localizer; however, it likely caused the flight to overshoot the localizer centreline during the turn to final. The localizer intercept angle of 51° was within the recommended range indicated in the aircraft operations manual (AOM). Therefore, it is unlikely that the localizer intercept angle prevented the aircraft from capturing the localizer.
The investigation could not determine the precise means by which the aircraft turned at MUSAT. Consequently, 2 plausible scenarios are discussed in sections 2.6.2 and 2.6.3.
As FAB6560 approached MUSAT, the crew switched from GPS to VHF NAV. At this point, the following conditions were common to both scenarios discussed below:
VHF NAV no. 1 − IRB ILS/DME 110.30
VHF NAV no. 2 − IRB ILS/DME 110.30
GPS no. 1 − RNAV 35T approach
GPS no. 2 − RNAV 35T approach
For both scenarios, after completion of the in-range check, the following conditions were likely:
Autopilot heading switch − HDG SEL
Captain and FO MD-41 − NAV
Autopilot on GPS − deselected
Captain and FO HSI
Course selector 347°
Heading bug ~024°
Captain and FO flight director − AUTO APP
Captain and FO APD flight director − amber VOR/LOC
ADF no. 1 − RB NDB 350
ADF no. 2 − RB NDB 350
2.6.2. VOR/LOC mode selection after turn (scenario 1)
For this scenario, the following additional conditions were likely upon completion of the in-range check:
Autopilot − MAN mode
Captain and FO APD autopilot − lights not illuminated
Given the above conditions, the following sequence should have occurred. As the aircraft approached the localizer, the track bar on the HSI would move inward from the right side of the instrument. The pilot would need to turn the HSI heading selector knob to rotate the heading bug to the desired new heading (347°). The autopilot would then turn the aircraft to the selected heading. Once established inbound on final approach, the pilot would select VOR/LOC on the autopilot mode control panel (MCP). The approach progress display (APD) autopilot VOR/LOC light would illuminate green when LOC is captured. The flight director display would initially show a left-turn-required indication and then wings-level indication once rolled out on the localizer. The APD flight director VOR/LOC light would change to green upon localizer capture at about 2.5° from the localizer, and the glideslope light would remain amber.
Simulator testing showed that use of VOR/LOC mode resulted in tracking or converging with the localizer. However, radar data show that the aircraft steadily diverged from the localizer, indicating VOR/LOC mode was not selected following the turn. Therefore, this method was not used.
2.6.3. VOR/LOC mode selection before turn (scenario 2)
For this scenario, the following additional conditions were likely upon completion of the in-range check:
Autopilot − VOR/LOC mode
Captain and FO APD autopilot − amber VOR/LOC light
Given the above conditions, the following sequence should have occurred. As the aircraft approached the localizer, the track bar on the HSI would move inward from the right side of the instrument toward the centre. The autopilot submode becomes VOR/LOC capture, and would initiate the turn to intercept the localizer (regardless of the heading bug setting on the HSI) when the course deviation bar indicated about 2 dots from the localizer centreline. The APD autopilot VOR/LOC lights would change to green. The heading switch would return to HDG HOLD. In AUTO APP, both flight directors would initially be commanding wings-level to fly the selected heading on the HSI. At about 2.5° from the localizer, the flight directors would change to capture mode, the command bars would command a left turn, and the APD flight director VOR/LOC lights would change to green while the glideslope light would illuminate amber.
Between 2 dots and 1 dot from the localizer centreline, when the cross-beam rate drops to less than 2 millivolts (mV) per second and the bank angle is less than 6°, the autopilot submode should switch to VOR/LOC on course and the APD autopilot VOR/LOC lights would remain green. The flight director command bars would change from commanding a left turn to commanding a return to wings-level once rolled out on the localizer. The pilot would rotate the heading bug to align with the anticipated heading for rolling out of the turn and readjust the bug once the aircraft had rolled wings-level. The captain's HSI heading bug was found set at 330°.
The autopilot should now track the localizer toward the runway. As the autopilot and flight directors capture the glideslope, the APD autopilot and flight director VOR/LOC lights would remain green, and the APD flight director glideslope light would change to green. The pilot then uses CWS to make autopilot pitch adjustments to maintain the glideslope. Assuming the aircraft tracks the localizer and glideslope, it should reach the decision height 200 feet above the touchdown zone, approximately ½ mile from the runway threshold.
When the autopilot is operating in VOR/LOC mode, the roll channel is in low detent before localizer on course submode, and in high detent after localizer on course submode. Exceeding high detent in roll causes the autopilot to revert to MAN mode. Simulator testing showed that the autopilot could be tripped from VOR/LOC to MAN by putting force on the control wheel in excess of the applicable detent force without inducing any roll.
In MAN mode, the autopilot responds to pilot CWS roll control inputs. The heading switch is used to engage the following roll submodes: HDG HOLD, HDG SEL and HDG OFF. With the heading switch in HDG SEL, the autopilot uses the selected heading data from the HDG bug on the captain's HSI. In HDG SEL, the autopilot roll channel is in high detent, and the switch will trip to the centre (HDG HOLD) position if the roll high-detent force is exceeded.
The curve smoothness of the roll angle plot between points A and E in Figure 14 is consistent with a turn initiated and executed by the autopilot. Control wheel movements made by the pilot would result in a jagged curve for the roll angle plot.
Figure 14. Flight data recorder (FDR) plot showing overview of turn at MUSAT
However, if VOR/LOC had been engaged before the turn and remained engaged throughout the turn, the autopilot should have captured and tracked the localizer. Simulator testing showed that use of autopilot VOR/LOC mode resulted in either intercepting and tracking or convergence with the localizer in every case.
Therefore, in this scenario, it is likely that the autopilot reverted from VOR/LOC mode to MAN mode at some point during the turn. This reversion could only have occurred if a force exceeding the applicable detent was applied to the control wheel.
The scenario will be discussed in relation to 2 flight phases:
From in-range check completion until the flight reached the localizer centreline;
After crossing the localizer centreline.
2.6.3.1. In-range check to localizer centreline
While the aircraft was greater than 2 dots from the localizer (VOR/LOC armed but not yet captured), the autopilot roll channel would be in high detent, because the heading switch was set to HDG SEL.
Once the aircraft was about 2 dots from the localizer, the autopilot would switch to VOR/LOC capture submode, and the heading switch would revert from HDG SEL to HDG HOLD. The autopilot roll channel would switch to low detent because of the HDG HOLD mode. If the low detent force was exceeded, the autopilot mode selector switch would revert from VOR/LOC to MAN.
The aircraft commenced the turn from a true heading of 039° (Figure 14, point A), and crossed the localizer centreline at 1638:32 (point C), rolling left through a true heading of 015°. If the low detent force was exceeded before crossing the centreline, and if the aircraft had less than 5° bank, the autopilot would roll wings-level and maintain a steady heading between 015°T and 039°T, causing the aircraft to track to the northeast. If the aircraft had greater than 5° bank, the autopilot would maintain that bank angle until further inputs were made. However, the radar and FDR data show that the aircraft did neither of these things. Additionally, the FDR shows that there were no control wheel inputs made until after the flight crossed the localizer centreline and the aircraft had rolled almost wings-level.
Therefore, it is unlikely that either the detent force was exceeded or that the autopilot reverted from VOR/LOC mode to MAN during the turn before crossing the localizer centreline.
2.6.3.2. Localizer centreline to roll-out on final
The autopilot remained engaged throughout the approach. Tracking toward MUSAT, before the turn onto final approach, the autopilot would have initially been in VOR/LOC armed mode, with the heading switch in HDG SEL.
FDR data for control wheel movement and roll attitude show that the left turn began at A (Figure 14). FDR data during the turn (A to G) will be discussed in this section. FDR data for the period following the turn (G to H) will be discussed in section 2.8.
The control wheel position plot from A to B is consistent with autopilot initiation of the turn as the aircraft reached 2 dots left of the localizer at A and the autopilot switched from VOR/LOC armed to capture. At this time, the heading switch would change from HDG SEL to HDG HOLD, and the APD autopilot VOR/LOC lights would be illuminated green. The turn begins with a smooth steep rise as the autopilot began the turn by rolling the aircraft to the left. The roll rate increased from 0 to a peak of 5° per second, which was coincident with the control wheel movement peak at B.
The control wheel position plot from B to C is also consistent with autopilot operation. It begins with a steep decline as the autopilot sensed the need to reduce roll rate as the maximum bank angle limit of 25° was approaching. At C, the bank angle peaked at 24° left and the control wheel returned to the neutral position. This point occurred about 2 seconds after the aircraft crossed the localizer centreline.
The control wheel position plot from C to D is also consistent with autopilot operation. As the autopilot sensed the need to begin rolling out of the left turn at C, the control wheel continued to move from neutral to the right. The right control-wheel deflection peaked at D, at which point the aircraft was about 1 dot right of the localizer.
The control wheel position plot from D to E is also consistent with autopilot operation. At D, the autopilot sensed the need to begin reducing the right roll rate, and the control wheel began returning toward the neutral position.
The autopilot was likely still in VOR/LOC capture submode, and had not yet switched to VOR/LOC on course submode, because between D and E:
The bank angle was greater than 6° until 1638:47, about 2 seconds before E; and
The cross-beam rate would have been greater than 2 mV per second, because the aircraft was about 1 dot right of the localizer and diverging.
Because the autopilot was still in VOR/LOC capture submode, the autopilot roll channel would have still been operating at the low detent (4 pounds).
From A to E, the flight director command bars would have been commanding turns to coincide with the turns made by the autopilot.
The control wheel position plot from E to F is not consistent with autopilot operation. Unlike the smooth movement of the control wheel from A to E, the data plots show several abrupt control wheel movements commencing at E and ending at F. It is likely that these movements were the result of manual CWS inputs by the captain. It is likely that the control wheel input at E exceeded the autopilot roll channel low-detent force, causing the autopilot to revert from VOR/LOC to MAN mode.
At E, the flight directors should still have been in AUTO APP, with the APD green VOR/LOC and amber glideslope lights illuminated. The autopilot mode reversion would not have affected the flight directors. As the autopilot (MAN and HDG HOLD mode) rolled the aircraft wings-level, both flight directors should have commanded a left turn because the intercept angle back to the localizer was insufficient.
The control wheel input at E occurred as the aircraft was turning left through a recorded heading of 334° with 5° of left bank (1638:49). When the control wheel input ceased, the bank angle was 2°. In MAN mode and HDG HOLD, with less than 5° bank, the autopilot should have rolled wings-level and maintained a steady heading once wings-level. The roll and heading data for F to G show that the aircraft generally maintained a wings-level attitude.
At F, the aircraft was approximately 1.5 dots right of the localizer. Had the autopilot remained in VOR/LOC in localizer capture submode, the aircraft should have continued rolling further to the left, to a heading that would provide a suitable intercept angle back to the localizer from the right side. Once the aircraft returned to the localizer, the aircraft should then have turned slightly back to the right, to a heading that would maintain the localizer centreline (Figure 15).
Figure 15. Example of VOR/LOC localizer capture (scale represents miles from the threshold)
The FDR data show that the CWS roll inputs ceased at 1638:53. At this time, the roll attitude was 1° left bank, and recorded heading was 332°. The aircraft continued rolling, and stabilized at 1° right bank at 1639:05, with the recorded heading of 330°. The compass error was −16°; therefore, the true heading was 346°. During final approach, the wind would have resulted in 3° of right drift. With the wind drift, the resultant radar track of FAB6560 diverged progressively further to the right of the localizer, as shown in Figure 15.
Because the aircraft did not turn to the left back toward the localizer, the autopilot could not have been in VOR/LOC mode.
The control wheel position remained unchanged from F until another right input at G. The heading and roll information between F and G is consistent with operation of the autopilot in MAN and HDG HOLD.
2.6.3.3. Awareness of unintentional autopilot mode change
Visual indications in the cockpit of the mode reversion would be the autopilot MCP mode selector switch rotating from VOR/LOC to MAN, and the green VOR/LOC lights on the captain and FO APD autopilot columns extinguishing.
The mode selector switch makes a clicking sound when moving from VOR/LOC to MAN. However, given the ambient noise level of the cockpit in flight, and the fact that there was a transmission from CYRB tower at the time (1638:49), it is unlikely that the pilots would notice this sound.
The mode selector switch would have rotated counter-clockwise from 12 o'clock to about 11 o'clock during the mode change. It is unlikely that the pilots would detect this change after it had occurred.
While in VOR/LOC capture submode, the APD autopilot VOR/LOC light should be illuminated green. When the mode change occurred, the green light should have extinguished. However, the APD flight director green VOR/LOC and amber glideslope lights should remain illuminated. It is unlikely that the pilots would detect the absence of this light, especially in the presence of other illuminated lights on the APD. There was no recorded discussion between the pilots regarding any of these indications. Therefore, it is likely that the crew did not detect the autopilot mode change.
2.6.4. Summary of turn analysis
At 1638:50, as FAB6560 was rolling out of the turn onto final approach to the right of the localizer, the captain likely made a control wheel roll input that caused the autopilot to revert from VOR/LOC capture to MAN and HDG HOLD mode.
Once the autopilot was in HDG HOLD mode, the autopilot would have rolled the aircraft to a wings-level attitude and maintained wings-level unless further CWS inputs were made by the pilot flying (PF). FDR data show that the flight rolled approximately wings-level at 1639:05, with a recorded heading of 330°. This heading would also have been displayed on the captain's HSI.
As shown in Figure 16, the indicated heading of 330° would have given the captain the perception that he had a 17° intercept angle to return to the localizer centreline track of 347°.
The no. 1 compass heading is displayed on the FO's HSI. Because there was no recorded discussion of the heading comparator light, the no. 1 compass should have been within ±8° of the no. 2 compass. Therefore, the heading displayed on the FO's HSI should have been within ±8° of the captain's heading. Consequently, the intercept angle on the FO's HSI should have been as little as 9° and as much as 25°.
The HSI is the primary navigational instrument for both pilots. The angular relationship between heading and localizer (Figure 16) would have been a powerful visual confirmation to both pilots that the intercept angle was satisfactory, and that it should return the aircraft to the localizer centreline. However, due to a −16° compass error at this point in the flight, the aircraft's true heading was 346°, as shown in Figure 17. With 3° of wind drift to the right, the resultant aircraft track (349°T) diverged further to the right of the localizer.
With a 17° intercept, the aircraft should have tracked back toward the localizer centreline. This correction would be depicted on both HSIs by the inward movement of the course deviation bar. However, because of the compass error, autopilot mode, and wind drift, the aircraft track diverged further to the right of the localizer. This divergence would have been depicted on both HSIs by the continued outward movement of the course deviation bar.
The track divergence was incongruent with the perceived intercept angle and the pilots' expectation of regaining track. This incongruency would have negatively affected the pilots' situational awareness and increased their workload as they attempted to understand and resolve this ambiguity.
2.7. Crew workload and interaction during turn onto final approach
Previous discussion centred on operation of the navigational systems. During the same period, the crew also performed tasks to begin configuring the aircraft for landing.
When the captain called for flaps 1 at 1637:25, the aircraft was descending through 4500 feet at 225 KIAS, heading toward MUSAT (Appendix D). The captain was likely aware that the aircraft was high and slightly fast, and did not delay in taking action to prepare it for final approach.
At 1637:42, the captain called for flaps 5 and the landing checklist. The initial portion of the landing checklist was completed in an expeditious but unhurried manner, and at 1638:05, the FO indicated that the checklist was holding at the gear and flaps. At 1638:20, the FO called localizer alive, and at 1638:22, the flight began the turn onto final approach.
During the period of 1638:19 to 1638:56, the normal activity for the captain would have been monitoring the autopilot as it executed the turn onto final approach, and also directing the FO to begin configuring the aircraft for landing. The FO executed several tasks during this same period. He was monitoring aircraft position, as evidenced by his statements regarding localizer and glideslope alive; he was communicating with tower; and he was reconfiguring the aircraft in response to the captain's gear-down and flaps-15 calls.
The captain's call for landing gear occurred just after the FO's 10-mile call to tower. The FO was occupied with landing gear extension, and he missed the tower instruction to report 3 miles final. The captain then called for flaps 15, and the FO would have had to make the flap lever movement before requesting tower to repeat the transmission. The FO then confirmed that the landing gear was down, received and acknowledged the 3-mile-final instruction retransmitted from tower, and confirmed that the flaps were set at 15.
The sequence of events indicates that the captain likely perceived the need to continue configuring the aircraft as a higher priority than the FO's communication with tower. This perception is consistent with generally accepted airmanship principles (task hierarchy of aviate, navigate, communicate).
However, the effect of this sequence was to increase the FO's workload during this 37-second period. Completion of these tasks required making 7 verbal statements, as well as monitoring instruments, and moving landing gear and flap levers. In addition to the verbal and physical actions involved, the tasks also required cognitive effort to perceive and process information. This period involved intense workload for the FO.
To avoid having the aircraft reach the undesired state of full localizer deflection, the SOP required the pilot not flying (PNF) to call “Localizer” when the deviation was 1 dot or greater. The required response from the PF was “Correcting.” However, as FAB6560 was transiting through 1 dot right at 1638:43, the captain had just called for flaps 15, and the FO would have been reaching for and moving the flap lever. A “localizer” call was not made at 1 dot of deviation because either the FO did not observe the localizer deviation or he prioritized it below the configuration changes and radio calls.
2.8. Completion of turn and continuation of approach
2.8.1. Aircraft state at completion of turn
At 1639:05, the aircraft rolled out of the turn 1½ dots right of the localizer and 1½ dots above the glideslope at 3100 feet above sea level (asl). Configuration was landing gear down and flaps 15, with 168 KIAS. The autopilot mode was likely MAN with HDG HOLD.
2.8.2. Initial divergence from localizer
2.8.2.1. Flight data recorder data
At 1639:18 (line G of Figure 14), a control wheel movement to the right occurred. This movement is consistent with a manual CWS roll input by the PF rather than a roll input from the autopilot.
When the CWS input ceased, the control wheel returned to the neutral position, and the aircraft rolled wings-level. The remaining interval between G and H shows the control wheel gradually moving from neutral to 4° right, and then back to 2° right at H. Roll angle, roll rate, and heading during this period indicate that the aircraft was wings-level, despite the control wheel angle. Once again, this information is consistent with the autopilot operating in MAN and HDG HOLD.
At H, another control wheel movement occurred, this time initially to the left. The movement peaked at 10° wheel-left, and then changed direction to the right, through the neutral position to 6° wheel-right. These movements are consistent with manual CWS roll inputs by the PF.
On releasing the wheel pressure at 1639:39, the autopilot mode almost certainly returned to HDG HOLD. The FDR data show that the control wheel slowly moved from 6° wheel-right to neutral at 1639:50. The roll data lag the wheel position data slightly, with the aircraft reaching wings-level at 1640:07. The heading data match the roll data, with the recorded heading stabilizing at about 330°.
2.8.2.2. Crew mental models following turn onto final approach
From 1639:13 to 1639:30 (Appendix A), the FO made 5 statements regarding the aircraft's progressive divergence to the right of the desired track, indicating that he was closely monitoring the aircraft position. The captain acknowledged the FO's initial statement. During this period, at 1639:23, FAB6560 reached a position coincident with 2 dots right of the localizer and still 1½ dots above the glideslope. At 1639:24.2, the FO made a statement referring to full deflection from the localizer.
At 1639:33 and 1639:36, the captain made 2 statements that suggest that he was satisfied that the autopilot was tracking properly. These statements coincided with the control wheel movement at H discussed in the section above.
The captain likely believed that the autopilot mode was still VOR/LOC, because they had entered the turn in VOR/LOC and had rolled out of the turn with a reasonable re-intercept angle following the initial localizer overshoot. The captain's statements and the control wheel movement at H suggest that the captain was likely performing a test to verify that the autopilot mode agreed with his mental model.
The captain's mental model was likely that the autopilot would re-intercept the localizer from the right and a landing would follow. However, the FO's mental model was likely that the aircraft was still diverging to the right of the desired track, despite an apparent intercept angle. This difference in mental models is the first indication that the pilots' shared situational awareness was breaking down.
The flight directors likely switched from AUTO APP intercept to AUTO APP capture at point A at 1638:21 as the turn began. At point E, the autopilot submode changed from VOR/LOC capture to MAN and HDG HOLD. However, the flight directors would not have been affected by the control wheel movements, and would have remained in AUTO APP. Consequently, the command bars would have been commanding a left turn toward the localizer, the APD flight director VOR/LOC lights would have remained green, and the glideslope lights would have remained amber.
If the LOC deviation signal exceeds the limit (2.5° for the localizer) during the 90 seconds after LOC capture, the flight director APD VOR/LOC annunciator amber light will illuminate and the green light will extinguish, as the flight director reverts from LOC capture to LOC intercept.
At 1639:51, 90 seconds after the flight directors switched to AUTO APP capture at A, the aircraft was greater than 2.5° off the localizer centreline. It is likely that both flight directors reverted to AUTO APP intercept mode. The command bars would then provide guidance to fly to and maintain the selected heading on the HSI.
The captain's HSI heading bug was found at 330°. At 1639:51, when the 90-second period elapsed, the recorded heading was 329°. Assuming that the captain's heading bug was set at 330°, there would be only 1° difference between indicated heading and selected heading, and any flight director roll command would be almost imperceptible. Therefore, it is likely that the captain's flight director was commanding wings-level or almost wings-level after reverting to AUTO APP intercept mode. This state would be a powerful reinforcement for the captain that the apparent intercept angle back to the localizer was sufficient. However, the HSI course deviation bar would have remained at its maximum deflection, 2 dots, despite further deviations off the localizer beyond 2 dots.
Indications available to the captain that a flight director mode change had occurred would have been a change in command bar position from commanding a left turn to commanding wings-level, and the APD flight director VOR/LOC light changing from green to amber. The command bars are in the attitude director indicator (ADI), and the APD lights are above the altimeter, about 6 inches to the right of the ADI.
If these changes occurred while the captain's attention was elsewhere, it would be more difficult to detect the changed state of the instruments upon returning his attention to them. Therefore, it is possible that the captain did not detect the flight director mode change.
If the mode change had not occurred and the captain's command bars continued to command a left turn to the localizer, it is extremely unlikely that the captain would ignore this cue without commenting on it. Given the FO's repeated statements about multiple indications of deviation from the localizer, if his flight director command bars had been commanding a left turn, it is almost certain that he would have mentioned this. There was no discussion between the pilots about command bars or APD lights at any time during the approach, suggesting that neither pilot was aware that the mode change had occurred.
The FO continued to voice his concern that they were progressively diverging further to the right. He also indicated that a second nav-aid, the GPS, confirmed that they were right of the desired track. The flight director reversion likely occurred about the same time the FO mentioned the GPS. It is possible that the FO was looking at the GPS, which was located on the centre console near his left knee. If the changes to the flight director command bars and APD lights occurred while the FO's attention was on the GPS, it would be more difficult to detect the changed state of the instruments upon returning his attention to them. Therefore, it is possible that the FO did not detect the flight director mode change.
The FO's HSI heading bug was not found, and its setting is unknown. Assuming that the FO also set his heading bug to the heading that the aircraft rolled out on, his flight director, once in AUTO APP intercept mode, would also be commanding wings-level or almost wings-level. The FO's statement at 1639:57 suggests that his flight director was in AUTO APP, but he did not mention the APD lights. It is likely that the FO was referring to his flight director mode selector switch being in the AUTO APP position. Regardless of whether the FO was aware of the flight director mode change, his understanding of the track deviation was based on the HSI course displacement bar and the GPS. These 2 indicators supported his mental model that the aircraft was right of track and they needed to go around, as evidenced by his repeated statements to that effect.
From 1639:51 until 1641:05, the recorded heading was within the range of 329° to 332°. With the captain's HSI heading bug set at 330°, his flight director command bars would have been commanding wings-level.
The pilots likely did not detect that the flight directors had reverted to AUTO APP intercept mode. In this mode, the flight director command bars provided roll guidance to the selected heading (wings-level command) rather than to the localizer (left-turn command). The apparent agreement between the HSI (right of track) and the flight director (wings-level) likely assured the captain that the intercept angle was sufficient to return the aircraft to the selected course. The FO likely put more weight on the positional information of the track bar and GPS. This situation represented a divergence in mental models that degraded the crew's ability to resolve the navigational issues.
2.8.3. Full localizer deflection
The HSIs had likely been indicating full-scale localizer deflection after 1639:23. During the subsequent 44-second period, the pilots were engaged in a discussion of aircraft position. At 1639:24.2, the FO stated, “Now we're through it.” This statement was likely an attempt to alert the captain to full-scale deflection. Throughout the discussion, the FO continued to monitor aircraft position; at 1640:07, the FO stated that they had full deflection (Appendix D). The utterance was phrased as a question seeking confirmation from the captain. At this time, the aircraft was 4.7 nm from the runway threshold and about 2800 feet right of the localizer, well in excess of 2 dots.
Full-scale deflection is an undesired aircraft state because safety margins can no longer be assured. Because the HSI is limited to displaying a maximum of 2 dots deflection, any further displacement beyond 2 dots would not be apparent to the pilots. As described in section 1.17.2.8.2, pilots are taught during initial instrument training that full-scale deflection of the localizer requires a missed approach. The AOM provided a call to be made whenever the localizer course deviation exceeded 1 dot from the centre, but did not provide a standard call and response for full-scale deflection.
The captain's response, at 1640:08, acknowledged that they were at full deflection, and indicated that he could not reconcile the FO's statement about full deflection with his own mental model that they would re-intercept the localizer from the right.
The FO's statement, at 1640:11, indicates that he was certain that the aircraft was not on the localizer. The captain's response, at 1640:14, indicates that he was still convinced that the autopilot was in VOR/LOC mode and had captured the localizer, and he confirmed that they had selected the correct ILS frequency.
At 1640:17, the FO voiced his disagreement regarding localizer capture, and mentioned the hill to the right of the airport. This communication indicates that the FO was aware that the autopilot had not captured the localizer, and understood the hill to be a hazard.
At 1640:23, the FO once again stated that the GPS showed right of track.
The crew did not maintain a shared situational awareness. As the approach continued, the pilots did not effectively communicate their respective perception, understanding, and future projection of the aircraft state.
2.8.4. Go-around suggestion
During the turn onto final approach, the FO was occupied with configuration and communications tasks at the time the aircraft passed 1 dot right of the localizer. As a consequence, the “localizer” call did not occur.
After the aircraft rolled out of the turn, the FO identified that the aircraft was to the right of the localizer and was diverging. Although the FO did not use the required phraseology of “localizer” to alert the captain to the deviation, he did repeatedly attempt to point out the problem, as he was required to do by the checklist philosophy described in AOM Volume 1, page 03.20.2.Footnote 158 In doing so, he referred to both the localizer and the RNAV RWY 35 TRUE final approach track.
This communication occurred during an 80-second (1639:13 to 1640:33) discussion between the pilots that focused exclusively on aircraft navigation. The FO's statements did not influence the captain's actions, likely because they identified parameters rather than consequences and required action. An example of language that identifies consequences and required action would be: “We are at risk of hitting the hill; we must go around.”
The pilots shifted into solving the navigational problem and delayed configuring the aircraft for landing. This problem solving was an additional task, not normally associated with this critical phase of flight, which escalated the workload without resolving the problem.
Complicating matters, each pilot was trying to solve a different problem. The captain was trying to solve the problem of intercepting the localizer and landing the aircraft, and the FO was trying to solve the problem of getting the captain to change his course of action and initiate a go-around. This meant that neither pilot was effectively communicating to resolve the situation.
The discussion had not reassured the FO about the trajectory of the aircraft, and did not result in the captain changing his course of action. Consequently, at 1640:30, the FO informally suggested that they do a go-around and then talk the anomaly through.
However, the statement was voiced as an opinion, and did not include the phrase “go-around”. This statement indicates that the FO's mental model was now that the aircraft was full-scale deflection from the localizer and a go-around was required. The suggestion was not sufficiently assertive at a time when an escalation of communication was needed, and did not convince the captain to discontinue the approach.
There are several possible reasons why the FO's go-around suggestion may have been phrased as it was. Full-scale localizer deflection is seldom seen in contemporary air transport operations, and it is possible that the FO had not experienced full-scale deflection since his initial instrument flying training. Additionally, while the AOM specified a callout to identify a deviation in excess of 1 dot, there was no guidance as to what phrases to use or what action must be taken at full deflection. Go-around is a manoeuvre likely seen more frequently during simulator training than line operations, and is typically initiated at the missed approach point, rather than several miles before the missed approach point.
For an ILS approach, the AOM specifies phrases to be used by the PNF and PF at decision heightFootnote 159 (see section 1.17.2.9.1 in this report). The PNF standard callouts are “Minimums, runway in sight” or “Minimums, no contact.” The phrases do not refer to go-around, but instead alert the PF to the aircraft state and require the PF to make a decision. Based on the aircraft state information provided by the PNF, the PF indicates that he is either landing or initiating a go-around. In the event of a go-around decision, the PF states “Go-around thrust, flap 15.” The go-around procedure (reproduced in section 1.17.2.9.1, Figure 7) specifies a slightly different phrase for the PF: “Go around, flaps 15.”Footnote 160
The SOP guidance for the PNF was only to provide information to the PF. The PF then makes the decision whether to go around, and initiates the go-around by stating an executive command: “Go around, flaps 15.”
In the absence of standard phraseology applicable to his current situation, the FO had to improvise his go-around suggestion.
2.8.5. Approach continuation following full deflection
A go-around at full deflection is a defence against the threat of collision with terrain outside the ILS protected area.
At 1640:33, the captain acknowledged the FO's suggestion, and indicated that he would continue the approach. The captain's acknowledgement of the FO's go-around suggestion indicates that the captain had heard the suggestion.
Subsequent paragraphs describe the captain's likely mental model and explain why it made sense to him to continue the approach given his perception and understanding of the situation, despite the communications from the FO.
The captain likely thought that he was controlling the aircraft through the autopilot and that the autopilot was navigating back to the localizer and onto the glideslope. Concurrently, he was likely attempting to reconcile his mental model with the movement and position of the course deviation bar on his HSI. These tasks were a high workload for the captain at this time.
There are a number of environmental cues available in the cockpit to provide information to the pilots about autopilot approach mode progress. As discussed in section 2.6.3.3, the crew likely did not perceive these cues or correlate them with the autopilot mode change from VOR/LOC to MAN.
At this time, the captain's likely desired course of action was to maintain the current heading to re-intercept the localizer and ultimately to land at CYRB. His desired course of action was influenced by the following:
The autopilot mode likely switched to MAN and HDG HOLD during the roll-out from the turn, and the captain still believed that it was in VOR/LOC and that it was intercepting and would track the localizer.
The current erroneous heading resulted in an apparent intercept angle when, in fact, the true heading was divergent. This powerful supporting cue was displayed directly in front of him on the HSI.
The captain's flight director was likely in AUTO APP intercept mode, and would have been commanding wings-level.
The captain had previous successful experiences landing in poor weather conditions.
The captain may have expected to break out of the cloud base and acquire visual reference at or below 700 feet agl. This expectation of acquiring visual reference would support the captain's desired course of action to land the aircraft. (The crew were aware that the weather at CYRB had fluctuated between 200 feet agl and ½ sm at 1500 and 700 feet agl and 10 sm at 1600.)
Go-around is typically initiated at the missed approach point rather than several miles before the missed approach point.
Increased stress levels may result in attentional narrowing (section 1.17.8.3), and can adversely impact a pilot's ability to perceive and evaluate cues from the environment. Attentional narrowing can lead to confirmation bias, which causes people to seek out cues that support the desired course of action, to the possible exclusion of critical cues that may support an alternate, less desirable hypothesis.
The FO's suggestion that they do a go-around represents the alternate hypothesis. There were multiple cues supporting this hypothesis:
Course deviation bar movement to the left to full deflection,
GPS indications, and
Multiple statements from the FO.
Given the captain's workload, he was likely experiencing increased stress. This stress would have made him susceptible to the influence of confirmation bias and attentional narrowing. This susceptibility would make it difficult for the captain to perceive and evaluate other cues such as those offered by the FO and by the course deviation bar and GPS. Additionally, as the PF, the captain's primary role was controlling the aircraft, which diminished the time available to him to maintain an overview of the situation and formulate a strategy.
It is likely that the captain did not fully comprehend information that indicated that his original plan was no longer viable. Although he likely understood the FO's go-around suggestion, the suggestion conflicted with the captain's plan to complete the approach and land. Therefore, the FO's suggestion would have been less desirable to the captain.
The captain's response to the FO commenced immediately after the FO finished speaking; the captain did not take any time to evaluate the FO's suggestion. The absence of any evaluation of the FO's suggestion is indicative of the captain being affected by plan continuation bias (section 1.18.1). The captain likely deferred any decision to go around, and defaulted to his original plan to re-intercept the localizer and land.
The fundamental disagreement between a suggestion to go around and continuation of the approach is a strong indicator of further breakdown in the pilots' shared situational awareness. The consequence of this further breakdown was that it compromised the pilots' ability to communicate effectively, and it became an additional problem that the crew needed to solve.
At 1640:35, the FO acknowledged the captain's statement and the approach was continued.
2.8.6. Unstable approach and continuation of approach
The SOPs required the PNF to make a callout (position, altitude, altimeter, and instrument cross-check) at the final approach fix (FAF) and a callout for parameters exceeding tolerances while inside the FAF (sections 1.17.2.8.3 and 1.17.2.8.5). The FO did not make either the callout as FAB6560 passed abeam POKAN FAF or a callout for excessive airspeed.
The absence of these callouts is indicative of the FO's high workload inside the FAF, as well as of his prioritization, in that he was almost certainly more concerned with getting the captain to do a go-around than with making corrections to individual approach parameters.
The company's stable approach criteria were described in the First Air Flight Operations Manual (FOM)Footnote 161 (see section 1.17.2.8.4 in this report). Although the FOM provided policy guidance, there was no complementary procedural guidance in the AOM describing how the policy would be implemented, similar to standard phraseology and actions specified for other events such as reaching decision height. In the absence of a procedural framework for initiating a go-around in the event of an unstable approach, pilots had to improvise.
The investigation examined how First Air's CYZF-based B737 pilots would, in the role of PNF, advise the PF of an unstable approach and the need to go around. Pilots were aware that no SOPs existed for this situation, and pilot responses varied. Some pilots struggled to answer the question, taking up to 90 seconds to respond to a situation that in the cockpit would require immediate action.
At 1640:41.9, the FO stated, “We're 3 mile final; we're not configged.” The aircraft was on the glideslope at 1140 feet asl (920 feet above airport elevation) with landing gear down and flaps 15. Engine thrust was being reduced to idle, likely because the captain needed to reduce airspeed to enable further configuration changes. Aircraft position was 2.9 nm from the runway threshold, with full-scale localizer deflection on the HSIs.
The altitude threshold below which the company's stable approach policy applied and required an immediate go-around if the approach was not stable was 1000 feet above airport elevation. At this time, the FAB6560 approach was unstable in several parameters:Footnote 162
It was in excess of 2 dots' deviation from the localizer;
Significant changes in heading and pitch were required to correct to proper flight path;
Airspeed was 176 KIAS, VREF + 44 knots;
The aircraft was not configured for landing; and
The landing checklist was not complete.
Given the FO's repeated concerns voiced earlier during the approach, it is almost certain that, in advising the captain that they were 3 miles final and not configured, his intended message was “The approach is unstable and we must go around.”
Procedures for clear and consistent communications are intended to prevent confusion between the pilots. In this instance, the FO was providing consistent information to the captain regarding aircraft position and state. However, the “We're 3 mile final; we're not configged” call was immediately followed by the captain's command for selection of flaps 25. This sequence indicates that the message the captain perceived was “We need to configure for landing.” Immediate action to commence a go-around was required, and the FO's communications about the unstable approach were not clear.
The FO had made a previous go-around suggestion using non-standard language, which was ineffective. Similarly, the FO's statement at 3 miles was also ineffective, because it included information only about aircraft position and state. The FO's implication was that a go-around should be initiated, but this was subject to misinterpretation.
At 1640:45, the captain's response to the FO's 3-mile call was to call for flaps 25. This response suggests that the captain likely misinterpreted the FO's statement as a prompt to finish configuring the aircraft for landing rather than understanding the FO's intended message that the approach was unstable and a go-around was necessary.
The captain shifted focus from the track displacement to rapidly configuring the aircraft for landing. This shift further suggests that the captain intended to continue his desired course of action, which was to land at CYRB. It is likely that he was still being affected by attentional narrowing and plan continuation bias.
The following paragraphs discuss the crew's likely mental models and explain why it made sense to the captain to continue the approach given his perception and understanding of the situation.
By now, the captain's workload had increased further. He was still the PF and was still working to get on course while he integrated new information into his mental model. Now he had the additional task of rapidly configuring the aircraft in time to land. Therefore, it is likely that the captain was even more susceptible to plan continuation bias at this point than he had been only 12 seconds earlier.
Given the captain's workload and mental model, it is likely that only clear and unambiguous information would have succeeded in changing his understanding of the situation and his course of action. As discussed in section 2.8.5, the captain's desired course of action was supported by the following:
His belief that the autopilot was in VOR/LOC with an intercept to the localizer;
The apparent intercept angle displayed on the HSI;
Flight director command bars commanding wings-level;
Previous successful experiences in landing after conducting an instrument approach;
Expectation to acquire visual reference;
The fact that a go-around is typically initiated at the missed approach point.
The FO's desired course of action, a go-around, was supported by:
Movement of the course deviation bar to full deflection;
Increase in track divergence despite the apparent intercept angle displayed on the HSI;
GPS indications;
Unstable approach; and
Terrain hazard.
As before, it is likely that the captain did not fully comprehend that his plan to complete the approach and landing was no longer viable. The captain's response to the FO commenced several seconds after the FO finished speaking, indicating that the captain had likely taken time to evaluate the FO's “3 mile” statement. The captain likely did not consider a go-around, but again defaulted to his plan to land at CYRB. His priority now became configuring the aircraft, and the navigational problem likely became a lower priority.
The ineffective statement by the FO and the misunderstanding by the captain are indicators of further breakdown in the pilots' shared situational awareness. The captain's mental model was likely that the approach and landing could be salvaged, and the FO's mental model was almost certainly that there was significant risk to the safety of flight and that a go-around was required. These divergent mental models compromised the pilots' ability to communicate and work together effectively to resolve the progressively deteriorating situation.
The FO's statement did not explicitly identify the unstable approach, or include any go-around command or directive. Consequently, the captain did not interpret the FO's “3 mile final and not configged” statement as guidance to initiate a go-around, but instead interpreted it as an advisory that they needed to expedite configuration of the aircraft for landing. The captain continued the approach and called for additional steps to configure the aircraft.
2.8.7. Final configuration for landing
At 1640:45.9, the captain instructed the FO to select flaps 25 (Figure 18), and the FO did so. The SOPs required the FO to call out confirmation that the requested flap selection was made, and also a confirmation that the flaps had reached the selected position. However, the FO did not make either of these calls for the flaps 25 selection.
At 1640:49.1, the FO advised the captain that they were also experiencing full deflection on the GPS and that they needed to go left. This was yet another attempt to influence the captain's course of action, and suggests that the FO had momentarily stopped trying to convince the captain to initiate a go-around and was instead attempting to get the aircraft back on the localizer, where the risk of terrain would be eliminated.
At 1640:54.3, the captain responded that he could not go left. The indicated heading at the time was 330°, which provided an apparent 17° intercept angle back to the localizer. Given that the flight was only 3 miles from the runway, it is likely that the captain was reluctant to turn further left and increase the intercept angle, which could have resulted in overshooting through the localizer to the left if the apparent intercept angle had been correct. Additionally, in AUTO APP intercept mode, his flight director was likely commanding wings-level to maintain the heading selected with the heading bug.
During the period of 1640:56 to 1641:08, the FO made several statements regarding aircraft position and avionics mode. The captain called for flaps 30 and also acknowledged the FO's statements, but took no action based on them. The SOPs required the FO to call out confirmation that the requested flap selection was made, and also a confirmation that the flaps had reached the selected position. However, the FO did not make either of these calls for the flaps 30 selection. At 1641:08.3, the FO started to make a suggestion, and the captain interrupted the statement with a call for flaps 40.
This discussion was fast-paced and concurrent with configuring the aircraft, and did not help to resolve the navigational or avionics issues. The captain interrupted the FO's statements with the flaps 30 and 40 calls, which created a dynamic between them of haste to complete configuration taking precedence over the FO's concerns. The FO's statement was likely intended to be another suggestion to do a go-around, but was not completed because of the interruption.
The last 2 items of the landing checklist require both the PNF and PF to verify landing gear and flap indications. At 1641:10.1, the FO stated that the gear was down with 3 green lights, as specified in the checklist, but did not mention the flap position. The captain responded with an acknowledgement of the flaps at 40 with a green light, but did not verify the landing gear position. After all actions have been completed and verified, the PNF is expected to announce to the PF “Landing checklist complete,” but the FO did not do this. Although the landing checklist had not been called complete, the aircraft was in the landing configuration.
The FO did not make 5 required callouts as the final configuration changes occurred. This omission was consistent with task shedding of normal PNF duties during a period of very high workload, to enable completion of other tasks associated with configuring the aircraft, monitoring aircraft position, and attempting to convince the captain to go around. The FO was task-saturated. The consequence of this task saturation was that the FO had less time and cognitive capacity to develop and execute a communication strategy that would result in the captain changing his course of action.
As discussed above, thrust had been reduced to idle at 1640:36, likely because the captain needed to reduce airspeed from 178 KIAS to enable further configuration changes. As the flaps were selected to 25, 30, and 40, pitch angle remained at 2° nose-up. As drag increased, airspeed decreased to 136 KIAS at 1641:11, a 42-knot reduction in 35 seconds. At 1641:05, thrust began increasing from idle and reached 1.5 engine pressure ratio (EPR) at 1641:12. This increase was likely the result of the captain responding to the airspeed reduction. Concurrently, the rate of descent decreased from about 700 feet per minute (fpm) to about 150 fpm, and the aircraft went from being on the glideslope to being in excess of 2 dots above.
The captain's statement at 1640:54.3 that he could not go left occurred between his calls for flaps 25 and flaps 30. At this time, his attention was likely becoming focused on aircraft configuration and airspeed control, to the detriment of other parameters. As indicated by the rate of descent change and ballooning above the glideslope, his attention to flying the ILS approach was negatively affected. This situation is a strong indication that the captain was affected by attentional narrowing.
The captain had maintained the same heading from when the aircraft rolled out of the turn, at 1639:05, until 1640:54 (1 minute and 50 seconds). During this period, the aircraft travelled from 7.9 to 2.3 miles from the threshold, and progressively diverged from the localizer to full-scale deflection on the HSI.
The captain had information available to him indicating that the apparent intercept angle was not working. However, confirmation bias may have degraded his ability either to perceive this information or to integrate it into his mental model.
During this period, the captain was occupied with several simultaneous tasks. He needed to direct the final configuration of the aircraft for landing, reduce and stabilize airspeed, resolve the localizer issue, and regain the glideslope. He also needed to make specified callouts to verify that the configuration was correct. The captain missed at least 1 required callout, and was having difficulty integrating control inputs to correct for multiple parameters simultaneously. This difficulty is indicative of task saturation.
Due to attentional narrowing and task saturation, the captain likely did not have a high-level overview of the situation. This lack of overview compromised his ability to identify and manage risk.
2.8.8. Final portion of approach
From 1641:05 until impact, the FDR data show numerous control wheel movements at the same time as the aircraft was pitching nose-down. These wheel movements were consistent with the captain unintentionally moving the wheel from side to side as he moved the control column forward to correct to the glideslope. Small roll and heading changes occurred during this period that were coincident with the wheel movements. The heading changes are unlikely to have had an appreciable effect on flight director command bars, which likely continued to command wings-level.
At 1641:16, seconds after the final landing configuration was achieved, the aircraft position was approximately 4100 feet right of the localizer centreline, 1.5 nm from the Runway 35T threshold. HSI indications would have been full-scale right localizer and full-scale above glideslope. Airspeed had stabilized at 136 KIAS, and engine thrust was about 1.5 EPR. Altitude was 940 feet asl (720 feet above airport elevation). The aircraft was now near the altitude at which the captain likely expected to break out of the cloud base and acquire visual reference.
A 1641:16, the captain stated that something similar had previously happened to another pilot, and again indicated that he was continuing the approach. It is possible that the captain had misunderstood the recounting of the previous occurrence, or that he did not fully recall the occurrence, in which the crew had done a go-around and resolved the compass/navigational issue at a safe altitude. This comment by the captain did not contribute to the problem solving in the cockpit or alleviate the FO's concerns about the captain's course of action.
The captain's statement indicates that he was likely aware to some extent that there was a problem with the indicated heading and navigational indications. Despite this, he continued the approach, possibly because he expected to soon acquire visual references, as was his experience during Incident One (section 1.17.3.3.2).
The aircraft pitch attitude remained relatively stable (2° nose-up) between 1640:10 and 1641:18, other than a few minor excursions while thrust was decreasing and the aircraft was being configured (Figure 18). These excursions are consistent with autopilot pitch mode OFF, manual pitch CWS, and the autopilot maintaining the last pitch attitude set by the captain (section 2.3).
At 1641:18, the aircraft began pitching nose-down, reaching a pitch attitude of −2° at 1641:32. The captain had likely observed that the rate of descent had flattened and that they had ballooned above the glideslope, and had put forward pressure on the control column in excess of the low detent force. Once the control column pressure became less than the low detent, the autopilot maintained the new pitch attitude of −2°.
From about 1641:19 to 1641:27, FDR data show that the descent rate increased from about 100 fpm to 700 fpm. The nose-down pitch change and increased descent rate indicate that the captain had switched his priorities from configuring and airspeed reduction back to the glideslope and was manoeuvring to re-intercept the glideslope.
At 1641:26.3, the captain made a statement about the glideslope. The FO acknowledged and indicated that it was fully deflected. FDR and radar data show that, at the time, the aircraft was at 880 feet asl and was well above the glideslope and well right of the localizer. Because the aircraft position was so far right of the localizer and so close to the glideslope transmitter, it is possible that cockpit glideslope indications were unreliable.
At 1641:30.8, the FO made a VHF radio transmission to CYRB tower reporting 3 miles final. At this time, the aircraft was 0.9 nm from the runway threshold. The deferment of this call to tower is a further indication of the FO's high workload and task saturation.
At 1641:33, the tower responded with wind information and clearance to land, and at 1641:39, the FO replied. At 16:41:41.1, the FO stated that the aircraft was just over the shoreline. At this time, the aircraft was passing the northern edge of a pond about 0.7 nm to the southeast of Runway 35T. It is likely that the FO had incorrectly identified this visual feature as the coastline along the sea. The FO's statement indicates that he likely had some brief visual contact with the surface, which would have reinforced the captain's expectation of acquiring visual references.
FDR data show that the rate of descent had increased to 1000 fpm by 1641:40, with the airspeed increasing to 152 KIAS. At 1641:43, as the aircraft pitched further nose-down to −5°, the FO uttered an expletive. This was almost certainly an expression of his grave concern regarding the aircraft position and state.
The rate of descent then further increased to 1500 fpm at 1641:46 with the airspeed increasing further to 158 KIAS. Altitude was 530 feet asl (310 feet above airport elevation). The aircraft was abeam the Runway 35T threshold and 4400 feet to the right of the localizer centreline (Figure 19). At this time, the FO called the captain by his first name and again expressed his concern about the situation. This was a change of approach by the FO from providing information about aircraft performance and position to making a personal appeal by using the captain's first name to capture his attention and break his fixation on the glideslope and landing.
Figure 19. Final approach track relative to runway (image: Google Earth, with annotations by TSB)
The captain's fixation on the glideslope is further evidence that he had lost the high-level overview of the situation, and did not perceive or understand the consequences of continuing the approach.
At 1641:47.7, the GPWS generated an aural “sink rate” alert. This alert provided independent and definitive information about an impending hazard, and triggered the FO to instruct the captain to initiate a go-around, first by stating “Go for it”, a non-standard phrase, and then by using the standard phrase “go-around”.
At 1641:49.2, the GPWS generated an aural “minimums…minimums” alert, and at 1641:51.2, the captain called “Go-around thrust.” FDR data show that the aircraft pitched up to +5° and EPR increased to about 1.9, indicating that the captain had initiated a go-around.
The crew initiated a go-around after the GPWS “sink rate” alert occurred, but there was insufficient altitude and time to execute the manoeuvre and avoid collision with terrain.
2.9. Absence of control transfer during final approach
The company’s two-communication rule in the FOMFootnote 163 authorized the FO to assume control of the aircraft and fly it to a safe situation in the event that the pilot flying (PF) became obviously or subtly incapacitated. The captain of FAB6560 was verbally responsive to the FO’s comments and suggestions, and was making control inputs. Therefore, the captain was not obviously incapacitated. However, his persistence in following his course of action despite the FO’s verbal advisories indicates that he was experiencing subtle incapacitation, which was likely due to the stress associated with the deteriorating approach parameters and associated workload.
It is likely that the FO did not recognize the captain’s behaviour as that of subtle incapacitation. If the FO considered the two-communication rule, it is likely that he concluded that the captain was not incapacitated and the rule did not apply.
The FO’s non-application of the two-communication rule highlights a deficiency in the rule, in that the rule relies on the judgment of the PNF to determine whether subtle incapacitation exists. Recognition of subtle incapacitation may take considerable time, and it may not occur at all. Outside of the two-communication rule, there was no guidance provided to address a situation in which the PF is responsive but is not changing an unsafe course of action. This situation presented a unique problem for the FO of FAB6560; that is, how far should he allow the aircraft to deviate before taking over control from the captain?
There is a history of incidents and accidents in which the FO was the PNF and warned of a deteriorating situation, but did not take control when the captain continued an unsafe course of action (section 1.17.8.5). In all of these occurrences, the company had some form of two-communication rule, but the defence failed because the FO did not intervene and take control of the aircraft. Some likely reasons for this failure are difficulty in identifying subtle incapacitation, ambiguity in the wording of the procedure, or inhibitions on the part of FOs to take the drastic measure of taking control from a captain.
At the time of the First Air accident, there was no training or guidance within the company on how an FO would escalate a concern to the point that a go-around or change of control could be commanded. In the absence of policies and procedures, such as PACE (probing, alerting, challenging, and emergency warning), enabling the FO to escalate his concern as well as providing the authority to take control of the aircraft from the captain, the FO was limited to an advisory role. The FO was clearly aware of the increasing risk. The approach had continued beyond 2 points at which a go-around was required: first, when there is full localizer deflection, and second, in an unstable approach below 1000 feet. At both of these points, the FO attempted to communicate the need to go around to the captain. While not as definitively and clearly expressed as they could have been, these attempts are indicators that the FO was continuing his efforts to change the captain’s course of action.
The FO had previously flown as captain on another aircraft type with the company. However, he was new to the B737, and although obviously uncomfortable with the navigational situation, deferred to the captain.
There was no policy specifically authorizing an FO to escalate his role from advisory to taking control, and this FO likely felt inhibited from doing so. The FO made many attempts to communicate his concerns and suggest a go-around, but did not take control of the aircraft from the captain.
This accident and the other 3 occurrences cited (section 1.17.8.5) are indicators that failure of FOs to take control in deteriorating situations will occasionally result in catastrophic consequences in the global fleet of transport aircraft. Without policies and procedures clearly authorizing escalation of intervention to the point of taking aircraft control, some FOs may feel inhibited from doing so.
2.10. Adaptations and First Air B737 standard operating procedures
2.10.1. Adaptations
As discussed in section 1.17.2, there were numerous examples of how the FAB6560 crew deviated from the company’s operating policies and SOPs. Interviews with other CYZF-based B737 pilots revealed that some of the deviations were not unique to the crew of FAB6560. These policy and procedural deviations were adaptations employed by the pilots to gain some perceived benefit. Over time, the adaptations became normalized as the way the pilots operated the aircraft. Some of the adaptations were of a minor nature; however, other adaptations were more likely to have an impact on safety of flight. For example:
Occasionally hand signals or a tap on the control wheel were used to signify the transfer of control.
Approach briefings were commonly abbreviated when flying with familiar crew members or during good weather.
Altitude callouts would be made using non-standard phraseology, with hand signals sometimes used when the radios were in use.
GPS or FMS (flight management system) were sometimes used to transition from en route to final ILS approach.
Pilots were aware of when they would be subject to the company’s direct monitoring methods discussed in section 1.17.4, and could modify their behaviour during these monitoring periods. Additionally, the company had no indirect monitoring methods, such as a functioning flight data monitoring (FDM) program or line operations safety audit (LOSA), at the time of the accident. Consequently, the company was unlikely to detect the presence or persistence of the adaptations.
First Air’s supervisory activities did not detect the SOP adaptations within the CYZF B737 crew base, including the crew of FAB6560. As discussed in earlier sections of this analysis, the consequences of the adaptations on FAB6560 were ineffective intra-crew communication, escalated workload leading to task saturation, and breakdown in shared situational awareness.
2.10.2. Transition to instrument landing system approach
As discussed in section 2.2, one possible interpretation of the FAB6560 captain’s plan to transition from en route to approach was a non-standard method involving use of the GPS to align the aircraft with the localizer on final approach. Consequently, the investigation explored the question of whether this adaptation existed.
Pilot interviews revealed that some First Air B737 pilots used the GPS to turn the aircraft onto ILS final approach and would then switch to VHF NAV once established on the inbound track. Company management considered this practice unacceptable, and some pilots interviewed discouraged its use.
Pilots who did not use this method would make the switch to VHF NAV at distances back from MUSAT, which varied from 1 to 10 miles.
The AOM specifies that the items below the dashed line on the in-range checklist are accomplished after nav-aids and flight directors have been set up, as briefed, for the intended approach. Consequently, the checklist cannot be completed until the NAV switch selection has been made (MD-41 NAV/GPS selection). This requirement relates to order of task completion rather than aircraft position relative to the final approach track.
The varying distance at which the switch to VHF NAV occurred and the use of a non-standard method are both adaptations. One factor likely contributing to development of these adaptations was the absence of information as to where, in relation to the final approach track, the in-range check completion is to be accomplished.
An inherent risk associated with delaying the change to VHF NAV is that the landing check would sometimes be initiated before the in-range check was completed. This sequence introduces the possibility of some checklist items being missed as items are performed out of order. Additionally, depending on the aircraft position and heading at the time of the MD-41 NAV selection, it is possible that the autopilot would not track the localizer because the switch occurred too late and was outside of capture criteria.
If SOPs do not include specific guidance regarding where and how the transition from en route to final approach navigation occurs, pilots will adopt non-standard practices that may introduce a hazard to safe completion of the approach.
2.11. FAB6560 crew resource management
2.11.1. General
As discussed in section 1.17.7.1, crew resource management (CRM) is the effective use of all human, hardware, and information resources available to the flight crew to ensure safe and efficient flight operations. SOPs are an important information resource available to pilots, and provide standardized phraseology and structure for communications to maintain shared situational awareness. Additionally, they provide predetermined solutions to various problems, and assist with workload management and decision making.
2.11.2. Shared situational awareness
In this occurrence, there were deficiencies in both the discrete actions (incomplete approach briefing, altitude callouts, and airspeed callouts) and continuous actions (callouts of changes in aircraft state and flight director / autopilot modes) that were required of the crew to establish and maintain shared situational awareness. Consequently, there was a breakdown in their ability to jointly interpret, problem-solve, and take action on the information available. As they shifted from following established procedures to problem-solving behaviour, their workload increased, and the differences between their individual awareness of the aircraft state and of threats to safe flight posed an additional problem that the crew needed to overcome.
A breakdown in shared situational awareness occurred during the flight, as indicated by the following:
Differing perspectives as to the risk presented by the aircraft track and the unstable approach;
Differing mental models regarding the aircraft position and trajectory:
The captain was intent on continuing approach to a landing;
The FO was aware of the terrain hazard and was attempting to convince the captain to go around;
The lack of corrective action by the captain in response to the FO’s go-around suggestions and advisories about the track deviation and unstable approach.
The following behaviours by the crew members interfered with the maintenance of shared situational awareness:
The captain provided an abbreviated approach briefing, which reduced the likelihood that the pilots would have the same understanding and work effectively together.
The pilots were not required to make callouts of system mode changes, and did not do so. This callout information is critical for maintaining individual and shared situational awareness.
Each pilot was focused on a different aspect of the navigational system that they each strongly believed to be providing the most reliable information about their situation. The FO focused on the localizer and GPS indications of track divergence, and the captain focused on the apparent intercept angle.
Standard phraseology for challenge and response is intended to establish a common understanding and lead to conditioned, familiar results. The FO used non-standard phraseology regarding the full localizer deflection, and did not have available standard phraseology to alert the captain to the unstable approach.
The captain’s responses to the FO’s statements about full localizer deflection were non-standard. Such responses were a progression from the FO’s non-standard language, and a movement further away from the SOPs and into crew interactions in which shared expectations and coordinated actions would be difficult to maintain.
The non-standard language used by the FO to suggest a go-around reduced the likelihood of clear communication of his intent to the captain, and was a barrier to initiating coordinated action.
Crew workload increased as the pilots attempted to understand and resolve the incongruities in their individual mental models, and again as they rapidly configured the aircraft for landing. This increase in workload reduced their ability to solve the complex navigational problem and their disparate views about it.
Both the content and nature of the intra-crew communication clearly showed signs of breakdown in shared situational awareness. The fact that neither crew member identified to the other that this breakdown was occurring was an additional problem that had to be addressed. However, rather than explicitly identifying that the breakdown in shared situational awareness had occurred, each pilot continued to emphasize his own understanding of the situation in an attempt to convince the other of its veracity.
Neither of the pilots was disengaged from the situation. Some of the captain’s statements indicate that he was confused as to the autopilot mode and the reason why the aircraft was diverging from the localizer. Similarly, some of the FO’s statements clearly indicate that he was uncomfortable with the aircraft position and trajectory. However, neither the captain nor the FO was effective in resolving the other’s confusion or discomfort, and the breakdown in shared situational awareness was not resolved until the GPWS sink rate alert provided an independent warning.
The crew did not maintain a shared situational awareness. The breakdown of this aspect of crew coordination was evident throughout the approach.
Pilot interviews revealed that other pilots also employed adaptations of SOPs. Adaptations of SOPs can impair shared situational awareness and CRM effectiveness.
2.11.3. Communications
CRM best practices are intended to enable crew members to feel comfortable providing input to assist in decision making. It is generally accepted that crew members should assert themselves when they are unsure of something or if there is a genuine concern about the current course of action. The use of clear language is essential in time-critical situations. However, use of this type of language can be very difficult for some people, and ineffective assertion has been a factor in other accidents.
In the case of FAB6560, many of the communications between the pilots were ineffective because clear and unambiguous language was not used. For example:
The captain made a statement indicating that he would use RNAV to navigate to the localizer. This message could be interpreted in more than one way.
The FO’s advisory that they had reached full localizer deflection was phrased as a question, did not include any proposed corrective action, and did not elicit the appropriate response to initiate a go-around. The captain responded in turn with a question rather than corrective action.
The FO’s suggestion at 1640:30 that they do a go-around and then talk the anomaly through did not elicit the desired response to initiate a go-around. Instead, the captain continued the approach.
The FO stated that they were at 3 miles and not configured. It is almost certain that the intended message was that the approach was unstable and a go-around was required. However, the captain’s interpretation of this statement was that they needed to finish configuring the aircraft for landing.
When the aircraft reached full localizer deflection, the FO probed with a question about the aircraft position. He repeatedly alerted the captain about the progressive deviation from the localizer, and also made an alert about the terrain to the right of the runway. Although there was no clear challenge from the FO stating the consequences of continuing the approach, he did suggest an alternative course of action. However, the FO’s communications did not achieve his goal of convincing the captain to change his course of action.
Escalation in communication strategies can be difficult. The PACE model (probing, alerting, challenging, and emergency warning) provides pilots with a communication strategy designed to allow for a natural escalation of assertion, depending on the circumstances at the time. The FO’s probing and alerting statements and suggestion of an alternative course of action were consistent with the initial portions of the PACE model. However, the FO never did escalate to the point of an emergency intervention in the form of taking control of the aircraft.
The communications between the 2 pilots were ineffective. The captain was task-saturated and was likely influenced by plan continuation bias. Despite the FO’s communication efforts, concerns about FAB6560’s flight path were not incorporated into the captain’s decision-making process.
2.11.4. Workload management
CRM best practices are intended to enable crew members to effectively manage workload. Workload is a function of the number of tasks to be completed in a given amount of time and the ability of a person to handle those demands. An increase in tasks or a decrease in time available results in increased workload. To reduce workload, one must either reduce the number of tasks that must be completed or increase the time available to complete those tasks.
FAB6560 flight crew workload began to escalate as the flight made the turn onto final approach at MUSAT. Crew workload escalated further as the approach continued. As indicated by task shedding on final approach, both pilots became affected by task saturation. The escalating workload consumed mental resources and diminished the ability of the crew to recognize the excessive workload and take corrective action.
There was no indication that either pilot recognized that they were experiencing high workload. Although the FO suggested a go-around several times, these suggestions were prompted by full localizer deflection and the unstable approach rather than workload. The crew did not attempt to use other means to increase time available to complete necessary tasks. The pilots did not effectively manage workload.
2.11.5. Problem solving and decision making
Problem solving is a multi-step process that includes decision making. Effective decision making involves the accurate understanding of the current situation and its implications, formulation of a plan, and implementation of the best course of action. Pilots must continually re-evaluate their situation to determine whether they accurately perceive the situation, and whether the plan is working out as expected or a change in the plan is required.
As flight FAB6560 progressed, the crew were faced with several problems:
Descent was initiated late, and the aircraft was about 600 feet above the glideslope as the flight turned onto final approach.
The flight deviated from the localizer, eventually reaching full deflection. This deviation resulted in a lengthy discussion that drew the crew’s attention away from configuring the aircraft for landing.
The approach was unstable, reducing the time available for task completion and thereby increasing workload for both pilots.
The pilots had divergent mental models. This divergence compromised communications between them.
During the descent from cruise altitude, the captain recognized that they were above the nominal descent profile, and increased the rate of descent in an attempt to regain profile. However, this strategy was unsuccessful, and resulted in excessive airspeed below 10 000 feet and in remaining 600 feet above profile at the turn to final approach. This outcome is an indication that the captain had not modified his initial plan.
The crew realized that the aircraft was deviating to the right of the localizer and spent considerable time discussing it. The FO made numerous advisories to the captain about the track deviation, but did not suggest corrective action. When the FO did suggest a go-around at 1640:30, his proposal was immediately rejected by the captain. This rejection is an indication that the captain had not understood the implications of the situation. Consequently, the captain likely did not perceive any need to re-evaluate or modify his plan to continue the approach to a landing.
The FO recognized that the approach was unstable, and at 1640:41, made a statement that they were at 3 miles and not configured for landing. However, the statement did not clearly identify that the approach was unstable or propose corrective action. Consequently, the captain misunderstood the statement, and his corrective action was to configure the aircraft for landing. The captain’s reaction suggests that he had not recognized that the approach was unstable; therefore, he likely did not perceive any need to re-evaluate or modify his plan to continue the approach to a landing.
As previously discussed, the FO’s mental model was that a go-around was necessary, while the captain’s mental model was that the approach could be salvaged and a landing could be made. These divergent mental models compromised their ability to communicate, with the result that the FO’s suggestions that the plan be re-evaluated were not understood or implemented by the captain.
The crew did not effectively solve the problems they encountered during the descent and final approach.
In this occurrence, the FO acted in an advisory role, providing the captain with information about aircraft state and suggestions for alternative action. However, the FO’s communications were unassertive and ambiguous. Additionally, the captain’s escalating workload had degraded his ability to perceive and understand the information that the FO was providing. Attentional narrowing, confirmation bias, and plan continuation bias also had negative effects on the captain. The captain was presented with several opportunities to re-evaluate and alter his plan, but did not do so. The captain’s decision making was ineffective.
2.11.6. Summary of FAB6560 crew resource management
Shared situational awareness, communication, workload management, problem solving, and decision making are all integral components of CRM. As discussed above, the FAB6560 flight crew did not successfully employ any of these practices. Therefore, their CRM was ineffective.
2.12. Crew resource management training at First Air
2.12.1. Initial crew resource management training
The initial CRM training outlined in the First Air Flight Operations Training Manual (FOTM) meets the requirements of Commercial Air Service Standards (CASS) 725.124(39), and is delivered by 2 motivated instructors who believe in the importance of CRM training. However, First Air does not allocate 2 days, as was intended by Transport Canada (TC). To accommodate other training requirements, First Air’s initial CRM course has been reduced to a portion of 1 day. Because of these time constraints, the instructors were unable to teach all of the required subjects specified in both the FOTM and CASS 725.124(39) for initial training. Additionally, they were using the TC CRM training package, which does not include the latest CRM concepts and training methods.
As a result, course participants did not receive training in communication strategies for escalating concerns, in problem-solving and decision-making strategies, and in strategies about how best to align mental models among all crew members. Additionally, the course participants were not provided with tips to assist with workload management on the flight deck.
The captain of FAB6560 received initial CRM training in 1997 and the FO in 2007. No information was available regarding the training content or duration. The captain’s initial training in 1997 occurred only 6 months after the regulatory requirement for training came into force. The CRM training material used by First Air was produced by TC at about the same time. Therefore, it is likely that the initial CRM training content that the captain and FO received was similar to the course observed by the TSB.
The deficiencies identified in the First Air initial CRM course are aspects of CRM that played a role in this accident, as discussed above. First Air’s initial CRM training did not provide the occurrence crew with sufficient practical strategies to assist with decision making, problem solving, communication, and workload management.
2.12.2. Recurrent crew resource management training
Regulatory requirements for recurrent training do not identify any specific CRM subjects that must be taught, and there is no requirement to review any of the CRM topics covered during initial CRM training. However, the company’s recurrent training did cover attitudes, communication, and decision making. The recurrent training described SOPs as a means to trap errors, and as a source of standard phraseology to eliminate miscommunication and minimize misunderstanding. These SOP-related objectives are a fundamental cornerstone of CRM. However, CYZF-based B737 pilots employed SOP adaptations, indicating that this emphasis on SOPs was ineffective.
Unlike the initial CRM course content, some of the material covered during the recurrent CRM course included elements of more current CRM training, like discussions related to threat-and-error management concepts. The content of First Air’s recurrent CRM training met the requirements specified in the company’s FOTM and in CASS 725.124(39)(b).
CASS 725.124(39)(b)does not stipulate a specific duration for recurrent training. Since at least 2006, the company has allocated 4 hours to cover the recurrent material. The duration of the recurrent training observed by the TSB met the specified time requirement in the FOTM.
Following initial CRM training, the FAB6560 captain and FO received annual recurrent training; the captain’s most recent recurrent training was 9 months before the accident, and the FO’s was 5 months before the accident. However, during the accident flight, neither pilot effectively applied the CRM concepts provided in the company’s recurrent training.
The annual recurrent CRM training that the occurrence pilots received did not adequately reinforce their knowledge of CRM concepts or their ability to apply those concepts during line operations.
2.13. Crew resource management regulations in Canada
Current regulations require Canadian Aviation Regulations (CAR) Subpart 705 operators to conduct CRM training, but the regulations have not kept pace with advances in CRM theory and application, and are now outdated.
Transport Canada (TC) has taken steps to address many of the issues with the existing regulation that were previously identified by the Transportation Safety Board (TSB). However, none of these proposed changes have yet been introduced into regulation. The current regulation and standard for CAR Subpart 705 CRM training have not been updated to reflect advances in CRM training. As a result, there is a risk that flight crews may not be trained in the latest internationally recognized practices in threat-and-error management techniques.
Additionally, current CRM training regulations do not identify any minimum duration for initial and recurrent CRM training. As a result, operators are free to determine how much time they dedicate to CRM training. As long as operators can show that their CRM training meets the outdated requirements of CASS 725.124(39), the CRM course can be as short as they deem appropriate.
Air operators are required to provide many categories of flight crew training. However, there can be time-related and financial pressures to shorten training like CRM. The First Air initial CRM course observed by TSB investigators was completed in just over 4 hours, rather than the 2 days intended by TC. It is not reasonable to expect that all of the TC CRM training package could be effectively taught within such a short time. If inadequate time is allocated for initial CRM training, flight crew members are unlikely to develop sufficient critical CRM skills.
The recurrent CRM training requirements, as defined in CASS 725.124(39)(b), do not provide operators with clear direction regarding the minimum requirements for recurrent CRM training. In particular, there is no requirement to revisit any of the core CRM subjects outlined in CASS 725.124(39)(a). From a training standpoint, this lack of reinforcement of core skills taught during initial CRM training could result in a return to previously learned behaviours. Without adequate reinforcement of core CRM skills during recurrent CRM training, there is increased risk that flight crews will experience difficulty employing effective CRM on the flight deck.
In order for an operator’s CRM program to be approved, the operator must demonstrate that its program meets the requirements outlined in CASS 725.124(39). The standard practice is for the operator to submit its CRM training plan, often embedded as part of the company operations manual, to regional TC offices for approval. The regional TC office will then compare the training plan to the Standard to see whether the required elements are listed.
First Air had a CRM training plan that had been approved by TC. However, there is no indication that TC has ever attended one of First Air’s initial CRM courses. As a result, the company has not received feedback from the regulator regarding the quality of its initial CRM training and whether the course, as taught, meets regulatory requirements.
Facilitation is a specialized skill that must be developed. If individuals selected to teach CRM do not possess the necessary facilitation skills, they may experience difficulties effectively guiding participants through the training material. Ineffective facilitation could result in poor retention of the skills taught during the course.
In Canada, there is no requirement for CRM facilitators/instructors to complete a formal training course or to obtain any type of accreditation. Consequently, none of the instructors conducting CRM training in Canada are required by regulation to have demonstrated a minimum level of experience and/or training qualification. CAR 705 crew members required to complete CRM training number in the thousands, and many CAR 703 and 704 operators voluntarily provide CRM training to additional crew members. Neither of the company’s primary CRM instructors had received any formal facilitator/instructor training or accreditation in teaching CRM. The absence of instructor accreditation requirements increases the risk that flight crews will not receive effective CRM training.
The importance of having qualified CRM instructors has been recognized by the United Kingdom Civil Aviation Authority (CAA), which has a fully developed CRM accreditation process in place to ensure that flight crews receive the best possible CRM training.
2.15. First Air safety management system internal reporting processes
The First Air safety management system (SMS) enables employees to report safety issues using any of several reporting methods. However, the 2 previous events involving B737 navigational difficulties during instrument flight rules (IFR) approaches were not reported by First Air pilots to management. The absence of reports of Incidents One and Two constituted missed opportunities for organizational learning and identification of potential safety issues. That the go-around in Incident Two (a mandatory reporting item) was not reported indicates that the company’s reporting systems were not fully effective.
Hazardous situations which are not reported are unlikely to be identified or investigated; consequently, corrective action cannot be taken to mitigate associated risk.
2.16. CYRB instrument landing system functionality
There was no interference with the normal functionality of the instrument landing system (ILS) for Runway 35T in CYRB.
2.17. VOR scenario
After the inbound turn at MUSAT, the flight path of FAB6560 appears to be a track directly toward the YRB VOR. However, it can be concluded with certainty that the crew were not navigating using the VOR or intentionally tracking toward the VOR. The following information supports this conclusion:
Neither pilot mentioned the YRB VOR at any time during the period recorded on the cockpit voice recorder (CVR).
At 1615:24.1, the captain clearly briefed his intention to fly to the localizer using instrument approach based on area navigation (RNAV).
At 1617:11.9, the captain conducted a briefing for the ILS Runway 35T.
The Morse code identification IRB was recorded on the CVR every 32.3 seconds after 1617:08.5, indicating that at least one of the VHF NAV receivers was certainly tuned to the distance measuring equipment (DME) associated with the ILS for Runway 35T.
Discussion between the pilots during final approach included repeated references to deviation right of the localizer and the GPS flight-planned track.
Lab analysis of the no. 1 and no 2 VHF NAV control units clearly indicate that both units were tuned to the IRB ILS frequency, 110.30 megahertz (MHz).
Lab analysis of the VHF NAV transfer switch indicates that the switch was likely in the NORMAL position before impact. Consequently, it is likely that the no. 3 VHF NAV receiver would have been in standby mode and not controlled.
Both GPS units were programmed with the RNAV approach to Runway 35T with waypoints MUSAT, OTNEL, and RW35. The active waypoint was OTNEL. The YRB VOR was not included in the flight plan on either GPS.
2.18. Guidance for flight data recorder maintenance
As identified in this occurrence, the ED-55 guidance for flight data recorder (FDR) maintenance was insufficient to ensure FDR serviceability, specifically due to the short sample of data used for the correlation check (15 minutes). It is probable that there are other unserviceable FDR systems installed on aircraft operating in Canada.
FDR maintenance guidance (CAR Standard 625, Appendix C) by Transport Canada (TC) does not refer to the current European Organisation for Civil Aviation Equipment (EUROCAE) flight recorder specification, and therefore provides insufficient guidance to ensure the serviceability of FDRs. This insufficiency increases the risk that information needed to identify and communicate safety deficiencies will not be available.
2.19. Terrain awareness devices
The aircraft was equipped with an older-generation ground proximity warning system (GPWS), which provided only an aural alert and light when the aircraft was within the proximity parameters of the device. The device used radio altimeter information to determine proximity to terrain below the aircraft, and therefore did not provide a warning for rising terrain in front of the aircraft.
A terrain awareness and warning system (TAWS) provides both an aural warning and map display of terrain in front of the aircraft. The map display not only presents the crew with information regarding the terrain elevation along the flight path, but also provides additional situational awareness as to aircraft position relative to obstacles and the intended flight path. Improvements in the sources of information used to calculate and predict ground proximity have resulted in earlier warning notices and increased time for crew reaction. The new regulatory amendments requiring TAWS equipment on commercial aircraft configured with 6 or more passenger seats should substantially mitigate the risk of controlled flight into terrain (CFIT) accidents.
In this occurrence, the crew’s situational awareness would have been enhanced and reaction time to a ground proximity warning would have been increased had the aircraft been equipped with a TAWS.
2.20. Survivability
The survivability of the occurrence was related to the extent of damage sustained by the occupants’ restraint systems. Occupants whose seats separated from the fuselage early in the breakup sequence sustained more severe injuries, consistent with forceful contact with the ground. Occupants whose seats remained largely intact, upright, and partially attached to the left portion of the cabin floor, throughout or until late in the crash sequence, generally sustained less severe injuries, consistent with less forceful contact with injurious surfaces. All of the survivors belonged to this latter group.
2.21. NOTAM system
There were numerous NOTAMs (notices to airmen) issued to change the effective period of the military terminal control area (MTCA). The content of these NOTAMs was the same, with the exception of the bottom line, which provided the revised date and time groups. In some instances, the only change to the NOTAM content was 3 numeric characters on the bottom line of a coded 14-line message.
A new NOTAM is designated as NOTAMN and provides new information to airspace users. As such, it is likely to elicit users’ attention. The first NOTAMR (replacement NOTAM) is also likely to elicit users’ attention. A second NOTAMR, even with the replaced NOTAM number following the R, may only be examined in a cursory fashion, because the pilot may have seen the R designation previously. The pilot may therefore conclude that this is the same message read previously, especially given that there is no method of highlighting subtle changes.
NOTAMs issued through the Aviation Weather Web Site (AWWS) do not include the R, C, or N designations, and therefore, every NOTAM must be treated as a new NOTAM. However, upon initial scan of a new NOTAM regarding the Operation NANOOK airspace, the reader may think it is the same message as a previous one, because the text was identical except for a few digits at the bottom indicating a change to the effective date.
The issuance of so many almost identical NOTAMs in anticipation of a successful flight check, without any assurance that a flight check would be scheduled or could be carried out, may have led to confusion among the crews and the NAV CANADA Edmonton Area Control Centre (ACC) controller as to the status of the airspace.
The crews of FAB6560 and KBA909, as well as the Edmonton ACC controller handling FAB6560, all expected that the MTCA would be in effect and that control services would be provided. The NOTAMs issued concerning the establishment of the MTCA did not succeed in communicating the information needed by the airspace users.
2.22. CYRB air traffic control
All references to air traffic services at CYRB refer to military equipment and personnel, unless otherwise stated.
The CYRB 1600 routine aviation weather report (METAR) was the most recent report available to controllers and pilots. Although the CYRB terminal controller did not provide landing information on initial contact with FAB6560, the flight crew already had the 1600 CYRB METAR. Consequently, the fact that the CYRB terminal controller did not provide this information did not detract from the crew’s mental model and is not contributory to the accident. The CYRB tower controller’s responsibilities did not include providing ceiling and visibility; if they had, the controller would not have had any more recent information than the crew already had.
The tower controller did not have radar information available, and the weather prevented visual determination of the position of FAB6560. Therefore, the tower controller did not have the information required to determine whether any position warning was warranted.
Although the radar was not flight-checked, it was operating during the arrival of FAB6560, and radar information was available on both the area surveillance radar (ASR) and precision approach radar (PAR) displays in the terminal trailer. The radar could not be used for provision of control services, because it had not been flight-checked; therefore, the terminal controller was not providing control services and was not actively monitoring the radar displays. Consequently, the terminal controller was not aware of FAB6560’s proximity to terrain.
Neither the tower nor the terminal controller had sufficient valid information available to cause them to issue a position advisory to FAB6560.
The choice of Class D airspace for both the MTCA and the CYRB control zone was based on the desire to ensure that all aircraft within the airspace would be provided with positive control service. When the radar could not be used, the military determined that it could not provide services in the MTCA, and repeatedly delayed its establishment. The control zone, however, was in effect, but no consideration was given to the need to provide non-radar instrument flight rules (IFR) service, which the selection of a Class D control zone required.
Within a control zone, IFR control services would normally be provided by an IFR controller in the associated IFR control unit. However, the CYRB MTCA was not in effect; therefore, the airspace surrounding the control zone was Class G uncontrolled. Without the MTCA or a control area extension, insufficient airspace was available for providing IFR control services within the control zone to arriving or departing aircraft. Because the MTCA was not in effect, no separation standard or approach clearances were provided to FAB6560 and KBA909. This situation resulted in a loss of IFR separation between FAB6560 and KBA909 when KBA909 entered the Class D control zone at 1640:55.
There was no formal declaration of an alert phase by the CYRB control tower. However, some agencies that would normally be advised that the aircraft was in the SAR alert phase were made aware of the missing aircraft during the communication search for FAB6560. Joint Rescue Coordination Centre (JRCC) Trenton was ultimately notified by NAV CANADA Edmonton air control centre (ACC). The delay in notification of the JRCC did not delay the emergency response to the crash site, because the fire hall resources were already on standby and deployed immediately when the crash site became visible.
2.23. Aircraft maintenance
2.23.1. Airworthiness directives
As a result of AD 2004-19-10 and AD 2006-12-23 not being fully accomplished, the certificate of airworthiness for C-GNWN was not in effect at the time of the accident.
There were no anomalies entered into the aircraft logbooks related to controllability issues, and there was no indication in the flight data recorder that the crew had any controllability issue with the aircraft.
It is therefore concluded that the non-compliance with these 2 ADs did not contribute to the accident.
2.23.2. Emergency locator transmitter
The emergency locator transmitter (ELT) was installed with the activation switch in the OFF position. However, even if it had been in the ON position, it is unlikely that the transmission signal would have been strong enough to be detected, as the antenna cable was severed at impact. Therefore, it is concluded that the activation switch position of the ELT did not delay the rescue response for this accident.
The identification information programmed on the aircraft interface module (dongle) was from the aircraft that the ELT had previously been installed on. Since the ELT was unable to transmit, the incorrect identification information was not a factor.
2.24. Flight data monitoring
Proactive and non-punitive analysis of de-identified data generated during flight operations can help to identify and control risk present in a company’s operations. This capability provides a means to monitor pilot behaviour in addition to formal assessment tools, such as training and check rides. Air carriers that do not employ some form of flight data monitoring will have inadequate knowledge of risks existing within the company. This inadequacy can impair an air carrier’s ability to identify and mitigate the risks. If air carriers do not monitor flight data to identify and correct problems, there is a risk that adaptations of standard operating procedures will not be detected.
Although First Air has a flight data monitoring (FDM) program, the company’s FDM program was undergoing a transition to a new service provider at the time of the accident, and data analysis was not being conducted. This hiatus deprived the company of an opportunity to identify adaptations of SOPs, such as continuation to landing following an unstabilized approach.
2.25. Weather
The latest CYRB weather observation available to the crew was the 1600 METAR, which they obtained at 1609. The next recorded weather observation was a special weather report (SPECI) at 1649. The crew of FAB6560 had the most recent information available.
The CYRB visibility decreased from 10 miles at 1600 to 5 miles at 1649. This decline in visibility would not have triggered a SPECI. The CYRB ceiling decreased from 700 to 300 feet during this period. However, no information was available as to when the change occurred.
At 1641:41, the FO stated that he saw the shoreline. This statement means that he could briefly see the surface, and indicates that the cloud base was likely ragged. The CYRB airport elevation is 222 feet above sea level (asl), and the elevation of the wreckage was approximately 400 feet asl. The fire and smoke originating from the central fuselage and wings were not visible from the airport from the time of the crash until 1719. This fact indicates that the cloud base in that sector of the sky was less than 200 feet above the airport. However, because there is no information about the cloud base in other sectors of the sky, no conclusion can be drawn as to the cloud ceiling at the airport at the time of the accident.
Seven minutes after the accident, the CYRB 1649 SPECI reported an observed ceiling of 300 feet agl, which was 100 feet above approach minimums. Adding this ceiling height to the airport elevation of 222 feet, the reported cloud base would have been at 500 feet asl, which was about 100 feet above the crash site. Given that the site did not become visible until 1719, the cloud base in that vicinity of the hills was on the surface. The ceiling at the accident site differed somewhat from the conditions observed directly over the airport.
Observed surface visibility was 10 miles at 1600, and 5 miles at 1649. Although the visibility at the airport at the time of the accident is unknown, it likely did not decrease below approach minimums at any time during the arrival of FAB6560.
2.26. Risk associated with unstable approaches
Research has shown that unstable approaches present a high risk to safe flight operations.Footnote 164 As shown in previous investigations by TSB and other foreign agencies, negative outcomes include tail strikes, runway overruns, and controlled flight into terrain (CFIT). While there are some defences in place to mitigate the risk of unstable approaches, not all defences are employed by all operators. In this investigation, the Board examined in detail the defences available to air carriers to mitigate the risks associated with unstable approaches and their consequences. These mainly administrative defences include:
A company stabilized-approach policy, including a no-fault go-around policy;
Operationalized stable approach criteria and standard operating procedures (SOPs), including crew phraseology;
Effective crew resource management (CRM), including empowering of first officers to take control in an unsafe situation;
Use of flight data monitoring (FDM) programs to monitor SOP compliance with stabilized approach criteria;
Use of line-oriented safety audits (LOSA) or other means, such as proficiency and line checks, to assess CRM practices and identify crew adaptations of SOPs;
Non-punitive reporting systems (to report occurrences or unsafe practices);
Use of terrain awareness and warning systems (TAWS).
While First Air had some of these defences in place, including a stabilized approach policy and criteria, a no-fault go-around policy, safety management system (SMS) hazard and occurrence reporting, the two-communication rule, and an older-generation GPWS, these defences were not robust enough to prevent the continuation of the unstable approach or collision with terrain. Other TSB investigations have shown that non-adherence to company SOPs related to stabilized approaches is not unique to First Air.Footnote 165
Current defences against continuing unstable approaches have proven less than adequate.
Unless further action is taken to reduce the incidence of unstable approaches that continue to a landing, the risk of CFIT and of approach and landing accidents will persist.
3.0 Findings
3.1. Findings as to causes and contributing factors
The late initiation and subsequent management of the descent resulted in the aircraft turning onto final approach 600 feet above the glideslope, increasing the crew's workload and reducing their capacity to assess and resolve the navigational issues during the remainder of the approach.
When the heading reference from the compass systems was set during initial descent, there was an error of −8°. For undetermined reasons, further compass drift during the arrival and approach resulted in compass errors of at least −17° on final approach.
As the aircraft rolled out of the turn onto final approach to the right of the localizer, the captain likely made a control wheel roll input that caused the autopilot to revert from VOR/LOC capture to MAN and HDG HOLD mode. The mode change was not detected by the crew.
On rolling out of the turn, the captain's horizontal situation indicator displayed a heading of 330°, providing a perceived initial intercept angle of 17° to the inbound localizer track of 347°. However, due to the compass error, the aircraft's true heading was 346°. With 3° of wind drift to the right, the aircraft diverged further right of the localizer.
The crew's workload increased as they attempted to understand and resolve the ambiguity of the track divergence, which was incongruent with the perceived intercept angle and expected results.
Undetected by the pilots, the flight directors likely reverted to AUTO APP intercept mode as the aircraft passed through 2.5° right of the localizer, providing roll guidance to the selected heading (wings-level command) rather than to the localizer (left-turn command).
A divergence in mental models degraded the crew's ability to resolve the navigational issues. The wings-level command on the flight director likely assured the captain that the intercept angle was sufficient to return the aircraft to the selected course; however, the first officer likely put more weight on the positional information of the track bar and GPS.
The crew's attention was devoted to solving the navigational problem, which delayed the configuration of the aircraft for landing. This problem solving was an additional task, not normally associated with this critical phase of flight, which escalated the workload.
The first officer indicated to the captain that they had full localizer deflection. In the absence of standard phraseology applicable to his current situation, he had to improvise the go-around suggestion. Although full deflection is an undesired aircraft state requiring a go-around, the captain continued the approach.
The crew did not maintain a shared situational awareness. As the approach continued, the pilots did not effectively communicate their respective perception, understanding, and future projection of the aircraft state.
Although the company had a policy that required an immediate go-around in the event that an approach was unstable below 1000 feet above field elevation, no go-around was initiated. This policy had not been operationalized with any procedural guidance in the standard operating procedures.
The captain did not interpret the first officer's statement of “3 mile and not configged” as guidance to initiate a go-around. The captain continued the approach and called for additional steps to configure the aircraft.
The first officer was task-saturated, and he thus had less time and cognitive capacity to develop and execute a communication strategy that would result in the captain changing his course of action.
Due to attentional narrowing and task saturation, the captain likely did not have a high-level overview of the situation. This lack of overview compromised his ability to identify and manage risk.
The crew initiated a go-around after the ground proximity warning system “sink rate” alert occurred, but there was insufficient altitude and time to execute the manoeuvre and avoid collision with terrain.
The first officer made many attempts to communicate his concerns and suggest a go-around. Outside of the two-communication rule, there was no guidance provided to address a situation in which the pilot flying is responsive but is not changing an unsafe course of action. In the absence of clear policies or procedures allowing a first officer to escalate from an advisory role to taking control, this first officer likely felt inhibited from doing so.
The crew's crew resource management was ineffective. First Air's initial and recurrent crew resource management training did not provide the crew with sufficient practical strategies to assist with decision making and problem solving, communication, and workload management.
Standard operating procedure adaptations on FAB6560 resulted in ineffective crew communication, escalated workload leading to task saturation, and breakdown in shared situational awareness. First Air's supervisory activities did not detect the standard operating procedure adaptations within the Yellowknife B737 crew base.
3.2. Findings as to risk
If standard operating procedures do not include specific guidance regarding where and how the transition from en route to final approach navigation occurs, pilots will adopt non-standard practices, which may introduce a hazard to safe completion of the approach.
Adaptations of standard operating procedures can impair shared situational awareness and crew resource management effectiveness.
Without policies and procedures clearly authorizing escalation of intervention to the point of taking aircraft control, some first officers may feel inhibited from doing so.
If hazardous situations are not reported, they are unlikely to be identified or investigated by a company's safety management system; consequently, corrective action may not be taken.
Current Transport Canada crew resource management training standards and guidance material have not been updated to reflect advances in crew resource management training, and there is no requirement for accreditation of crew resource management facilitators/instructors in Canada. This situation increases the risk that flight crews will not receive effective crew resource management training.
If initial crew resource management training does not develop effective crew resource management skills, and if there is inadequate reinforcement of these skills during recurrent training, flight crews may not adequately manage risk on the flight deck.
If operators do not take steps to ensure that flight crews routinely apply effective crew resource management practices during flight operations, risk to aviation safety will persist.
Transport Canada's flight data recorder maintenance guidance (CAR Standard 625, Appendix C) does not refer to the current flight recorder maintenance specification, and therefore provides insufficient guidance to ensure the serviceability of flight data recorders. This insufficiency increases the risk that information needed to identify and communicate safety deficiencies will not be available.
If aircraft are not equipped with newer-generation terrain awareness and warning systems, there is a risk that a warning will not alert crews in time to avoid terrain.
If air carriers do not monitor flight data to identify and correct problems, there is a risk that adaptations of standard operating procedures will not be detected.
Unless further action is taken to reduce the incidence of unstable approaches that continue to a landing, the risk of controlled flight into terrain and of approach and landing accidents will persist.
3.3 Other findings
It is likely that both pilots switched from GPS to VHF NAV during the final portion of the in-range check before the turn at MUSAT.
The flight crew of FAB6560 were not navigating using the YRB VOR or intentionally tracking toward the VOR.
There was no interference with the normal functionality of the instrument landing system for Runway 35T at CYRB.
Neither the military tower nor the military terminal controller at CYRB had sufficient valid information available to cause them to issue a position advisory to FAB6560.
The temporary Class D control zone established by the military at CYRB was operating without any capability to provide instrument flight rules separation.
The delay in notification of the joint rescue coordination centre did not delay the emergency response to the crash site.
The NOTAMs issued concerning the establishment of the military terminal control area did not succeed in communicating the information needed by the airspace users.
The ceiling at the airport at the time of the accident could not be determined. The visibility at the airport at the time of the accident likely did not decrease below approach minimums at any time during the arrival of FAB6560. The cloud layer at the crash site was surface-based less than 200 feet above the airport elevation.
4.0 Safety action
4.1. Safety action taken
4.1.1. Transportation Safety Board of Canada
On 26 August 2011, the Transportation Safety Board (TSB) advised NAV CANADA of a discrepancy regarding one of the spot heights depicted on the CYRB approach plates. The TSB suggested that NAV CANADA validate the position and take amending action if necessary.
On 08 November 2011, TSB investigators presented a briefing to First Air senior management personnel regarding several operational safety issues (detailed below) that were uncovered during the initial stages of the investigation:
Standard operating procedures (SOPs) − First Air has an extensive compendium of SOPs for the Boeing 737. However, during the course of the investigation, several instances of crew adaptations and/or uncertainty with respect to the SOPs were discovered, specifically regarding:
procedures for unstable approach resolution (i.e., lack of concise language);
transition from global positioning system (GPS) intercept track to final ILS approach guidance; and
magnetic compass use in locations where true compass is required.
The validation of training processes and construct of SOPs may need to be examined.
Checklist design and usage − The in-range checklist is being held at the line (i.e., natural pause point), yet the landing checklist has to be initiated to start slowing the aircraft (gear, flaps 15). This practice creates a sequencing issue for crews, especially as to how the interruption and resumption of checklist items is carried out. The company was aware of this issue, but had not yet initiated corrective action.
Crew resource management (CRM) − It was emphasized that adaptations of SOPs and non-concise procedural language are a hazard to good communication within the crew. Additionally highlighted was the need for direction as to how a first officer can escalate from an advisory role to taking control when faced with a deteriorating situation.
Incident reporting system − First Air has a non-punitive reporting system as part of its safety management system. TSB investigators were advised of 2 incidents that were not reported to the company. The absence of reports represents missed opportunities for organizational learning, and may warrant a look at whether further corporate education is required in this area.
Technical issue − Flight data recorder (FDR) correlation checks accomplished by First Air showed a data-drop problem that has been present for the past few years and that was not identified and rectified. Maintenance staff may need to examine the procedures for data validation.
On 19 December 2011, the TSB advised NAV CANADA that a review of the CYRB approach plates and aerodrome chart indicated 4 different magnetic variation depictions. A limited review of Canada Air Pilot, volume (CAP) 1,Footnote 166 showed that many other locations similarly have different values for the magnetic variation depicted on different plates. The TSB suggested that NAV CANADA may wish to take amending action to depict consistent information in Canada Air Pilot, CAP 1, and amend processes to ensure that future magnetic variation depictions are consistent.
On 08 February 2012, the TSB issued Aviation Safety Advisory A11H0002-D1-A1, IFR Separation in Class D Airspace, to the Commander of the 1 Canadian Air Division, Royal Canadian Air Force. The advisory stated:Footnote 167
Because military ATC continued to operate the Class D control zone without the ability to provide IFR separation in instrument meteorological conditions, there was an increased risk of mid-air collision. Unless future EATM operations include the provision for all the air traffic services required for the class of airspace, this risk will persist.
On 12 April 2012, the TSB issued Aviation Safety Information letter A11H0002-D2-L1, Inadequate Guidance for FDR Maintenance,Footnote 168 to Transport Canada. The letter indicated that the Canadian Aviation Regulations (CAR) Standard for FDR maintenance does not reflect the current EUROCAE (European Organisation for Civil Aviation Equipment) specifications for flight recorder maintenance, and therefore provides insufficient guidance to ensure the serviceability of FDRs.
On 26 April 2012, TSB investigators presented a briefing to senior First Air management personnel regarding the company's CRM training. First Air conducts its initial CRM training during type training for newly hired pilots. TSB investigators attended a First Air initial CRM training course on 03 April 2012; this was the first initial CRM course conducted since the accident. The course was time-compressed, and did not address all of the modules required under CAR 705.124 − Training Program,Footnote 169 and Commercial Air Service Standards (CASS) 725.124(39) − Crew Resource Management Training.Footnote 170 Additionally, the content of the material presented was dated and did not include practical tools and strategies. It was suggested that the company may want to allocate more time to CRM training and update the course content.
4.1.2. First Air
4.1.2.1. Flight data recorder correlation check
First Air conducted an audit of its FDR correlation check procedures, and presented the results to TSB investigators on 08 December 2011. It was subsequently determined that First Air was conducting the data correlation check in line with the CAR. The unidentified data-drop problem was related to inadequate guidance for flight data recorder maintenance as described in TSB Safety Information Letter A11H0002-D2-L1.
4.1.2.2. Response to the 08 November 2011 and 26 April 2012 Transportation Safety Board briefings
Following the 08 November 2011 TSB briefing, First Air entered the safety issues presented into its safety management system file. The company evaluated the issues and developed a plan to address them. On 25 July 2012, First Air communicated its corrective action to the TSB. On 01 August 2013, this information was further updated to indicate the status of actions taken. Those actions are described below.
4.1.2.2.1. Standard operating procedures
First Air completed a review of B737, B767, ATR42, ATR72, and L382 standard operating procedures (SOPs) to identify adaptations of SOPs. Knowledge and procedural deficiencies were identified as areas for review and improvement.
Immediate actions
The following flight operations memoranda (FOPMs) were issued:
FOPM-11-55 was issued to provide crews with a comprehensive message from senior management concerning flight operations and with briefing instructions for the chief pilots. All flight crew members were individually briefed by their respective chief pilots to reiterate the requirement and importance of following the policies in the flight operations manuals and standard operating procedures. This management direction was instituted to ensure that all crew members understand their roles in maintaining a safe operation.
FOPM-11-072 − Escalating from an Advisory Role to Taking Control (24 November 2011) was issued, and the details of this direction were included in amendments to the flight operations manual as follows:
Any crew member can command a go-around using the call “Go around.”
Criteria for establishing a stabilized approach were enhanced.
The no-fault go-around policy was reinforced.
After reviewing industry best practice, the “two-communication rule” was reinforced.
Following review of industry best practice, the policy on pilot incapacitation was reinforced.
Standard callouts and tolerances have been produced across the fleets and incorporated within the fleets' AOMs.
FOPM-737-12-009 − Final Approach Intercept Procedures (20 January 2012) was issued, clarifying the transition from GPS/FMS (flight management system) intercept procedures to a ground-based navigational aid. This information has since been incorporated into the AOM.
FOPM-737-12-008 − Autopilot Management During ILS Intercept (20 January 2012) was issued, clarifying the use of the autopilot and flight director systems, and was incorporated into the AOM.
FOPM-12-004 − Mag/DG Selection (09 January 2012) was issued to all flight crew, emphasizing the importance of following SOPs and policies in all areas of the company's operations.
As well, a meeting was held with all fleet training pilots, stressing the importance of following SOPs and of maintaining vigilance for and eliminating adaptations of SOPs in line operations. This meeting also included guidance from management to place increased emphasis on system knowledge and effective use of the auto flight system during subsequent line checks, training courses, and simulator sessions.
Ongoing actions
The chief pilots of all aircraft types met for several days in the second half of 2012 to discuss common calls and procedures across all fleets. SOPs for all aircraft types have been rewritten in a common format. The first approval for the B737-200 and B737-400 SOPs was received in June 2013 from Transport Canada (TC), and these SOPs are in use. SOPS for the remaining types are planned for submission in a manageable flow to TC, and will be implemented in the fall to winter of 2013−14 as soon as they are approved and distributed and the training in differences is provided.
Linked with this project was a complete rewriting of the Ground Icing Operations Manual. The manual was submitted to TC and approved on 21 August 2012.
The rewriting of the Flight Operations Training Manual has been completed. The manual was re-named the Flight Crew Training Manual, was submitted to TC, and was approved on 19 November 2012.
First Air contracted outside expertise to provide a modern perspective on SOPs and their construction and use. The contracted company provided training on behavioural risk management (i.e., management of the risks related to not following SOPs) to management personnel in a leadership role. The knowledge gained is in practical use.
4.1.2.2.2. Checklist design and usage
The absence of the line on the landing checklist and the overlaps in the checklist were addressed through an amendment to the AOM.
4.1.2.2.3. Crew resource management
The crew resource management training was reviewed and updated with more modern content. The length of the initial course was increased to one full day.
4.1.2.2.4. Reporting system
A review of the reporting system and requirements was conducted. As part of the review, it was identified that certain policies in force may have contributed to reporting fatigue in limited areas. Several policies in place required items that were part of normal operations to be reported regularly, such as a normal diversion due to weather. Given the complex nature of the operating environment, other items may not have been reported due to the workload and the complexity of the policy and form used. The air safety report has been amended to remove the requirements to report expected normal operations items, decluttering it to provide more opportunity to describe any events that require attention. The importance of ongoing reporting of hazards was included within the notification to the crews of the air safety report form and policy changes. These actions were completed in October 2012.
Additionally, the manager of flight safety published 2 articles in the company newsletter promoting reporting in all aspects of flight operations.
4.1.2.2.5. Training standards
A review and revision of the Line Check Pilot Course was completed. The aim of this course is to ensure that all training and check personnel have a common standard by which to validate the training and to ensure that all company procedures are understood and followed. The first course was delivered on 24 July 2012.
4.1.2.2.6. Initial and recurrent training
First Air is conducting a review of all initial training. A review of simulator training, line indoctrination, and recurrent training will follow. Each of these programs will contain elements that reinforce crew resource management techniques.
4.1.2.2.7. Maintenance
Maintenance Services has initiated a program to determine the drift rate of the directional gyros while on the ground. If excessive drift rates are detected, an enhanced maintenance program will be put in place to provide acceptable performance. Coupled with this program will be feedback to flight crews to increase awareness of the operation of this system and of the reports required to maintain reliability.
4.1.2.2.8. Flight data monitoring program
First Air's flight data monitoring (FDM) program has been reviewed, and an outside company has been contracted to provide assistance and guidance in detecting SOP adaptations and other areas requiring training enhancement. The manager of the program produces quarterly reports, which are reviewed at the executive safety management meetings on a quarterly basis. This initiative has provided data for improvements in training and day-to-day operations for all aircraft types in the First Air fleet.
Subsequent to the discovery that Airworthiness Directives AD 2004-19-10 and AD 2006-12-23 had not been fully accomplished, First Air initiated a safety management system (SMS) investigation to determine why this had happened and to verify whether the same shortfall had occurred with the other B737 aircraft in its fleet.
Airworthiness Directive 2004-19-10
The company's investigation revealed that 5 of the remaining Boeing 737 fleet aircraft were also overdue for inspections of the horizontal stabilizer pivot hinge pins required by AD 2004-19-10.
The short-term corrective action plan grounded the affected aircraft until the required inspections of the horizontal stabilizer pivot hinge pins were completed. No anomalies were identified as a result of these inspections, and the aircraft were returned to service.
The corrective action plan implemented through the SMS included the arrangement of a third-party in-depth audit of all airworthiness directives pertaining to company Boeing 737, ATR (Avions de transport régional) and Lockheed C-130 Hercules aircraft. The company has created a new position that is primarily responsible for performing a separate and independent review of all future company evaluations of airworthiness directives. The company has also initiated development of a syllabus for mandatory airworthiness directive training (initial and recurrent) for all staff involved in the evaluation of airworthiness directives.
Airworthiness Directive 2006-12-23
When the operator was advised of the deferred free play entered on a deferred maintenance item (DMI) card, an audit of the records of its remaining Boeing 737 fleet aircraft was immediately undertaken. It was confirmed that none of these aircraft were operating with any deferrals from the completion of AD 2006-12-23.
Short-term corrective action was taken to remove the errant service maintenance procedure from the maintenance database and revise it to remove the incorrect deferral instructions. The company has committed to review all service maintenance procedures for its fleet during implementation of the newly acquired TRAXsoftware.
4.1.2.4. Emergency locator transmitter
Upon notification from the TSB that the emergency locator transmitter (ELT) installed on C-GNWN had not been armed, First Air initiated an SMS investigation. An immediate fleet-wide inspection confirmed that all of the remaining B737 aircraft had functioning ELTs.
The SMS investigation determined the following:
The ELT installed on C-GNWN on 07 October 2010 was not placed in the ARMED position after installation, and the aircraft interface module programming was not transferred to the ELT transmitter unit.
The installation of the ELT was carried out as notified by Scheduled Maintenance Action (SMA) 59600. The maintenance action “ELT replaced” was recorded on an additional worksheet with reference to Log Sheet 292877, in accordance with company policy. There was no reference on the SMA notification to the Aircraft Maintenance Manual Supplement MMS37-05-007, which provides the fault isolation and the instructions for removal and installation.
The most probable cause of the incident was a lack of clear instructions on the technical documentation, which contributed to the ground engineer not performing an installed systems test in accordance with instructions in Supplement MMS37-05-007.
First Air implemented the following corrective action:
A maintenance directive was issued on 30 April 2012 to reiterate that a maintenance release shall not be made unless it has been verified that the maintenance was accomplished in accordance with the Aircraft Maintenance Manual or Supplements and/or the Company Maintenance Control Manual, Section 6.5.
A memo was issued to the planning department to enhance its technical documentation as much as possible by providing accurate maintenance references before the documentation is issued.
As a proactive measure, the maintenance program was revised to include a requirement to function-check ELTs every 6 months, in accordance with approved data, to verify serviceability.
4.1.2.5. Compass operations
On 18 February 2014, in response to an internal hazard occurrence report regarding accuracy and operation of B737-200 directional gyros (DGs), the company issued FOPM B737-14-013, B737-200 Compass System – Directional Gyro Monitoring, to all B737 flight crew members. This document provided revised requirements regarding when and how compass heading checks must be conducted.
4.1.3. Royal Canadian Air Force
On 05 March 2012, the Royal Canadian Air Force (RCAF) responded to TSB Aviation Safety Advisory A11H0002-D1-A1, dated 08 February 2012, regarding the loss of IFR separation in Class D controlled airspace. The letter stated that the leadership team that deploys in support of future expeditionary air traffic management (EATM) initiatives will now include a senior air traffic control officer to ensure that a greater level of experience is present throughout the planning process and the conduct of operations. The lessons learned from this incident were communicated to the air traffic controllers that deployed during the most recent military exercise, Exercise Maple Resolve, and robust plans were developed to ensure that RCAF personnel are prepared to provide all required air traffic services for the airspace established. The planning process that was followed for Exercise Maple Resolve, in addition to the local orders and the airspace control arrangement that were created, will serve as templates for future EATM initiatives. These lessons learned will also be communicated to all air traffic control units.
4.1.4. Transport Canada
Following the accident, during the period from 13−21 September 2011, TC conducted a series of process inspections to verify compliance with the Canadian Aviation Regulations (CAR) and associated Commercial Air Service Standards (CASS). The activities and areas reviewed related to the safe conduct of commercial flying operations at First Air, and included crew training, crew pairing, flight planning, dispatch (operational and technical), flight monitoring and tracking, operational decision-making processes, the role of commercial operations in decision making, company expectations of incident reporting, and defect control.
The inspections concluded that the flight crew training records, defect recording, rectification deferral control procedures, and technical dispatch procedures did not meet the minimum regulatory requirements as set out in CAR 705.127(1)(c), 726.08(1), 726.08(m) and 726.08(o). The processes were found deficient because company practices were not as documented or were not effective.
Four findings were raised. The company submitted corrective action plans (CAPs) to address the issues of non-compliance that were identified by the findings. The CAPs were accepted, and subsequent follow-up by TC Civil Aviation inspectors confirmed the effectiveness of the implemented corrective actions.
On 27 August 2012, TC responded to TSB Aviation Safety Information letter A11H0002-D2-L1, dated 12 April 2012, regarding inadequate guidance for FDR maintenance. TC acknowledged that the reference to EUROCAE specifications in CAR Standard 625, Appendix C,Footnote 171 is out of date. It further indicated that the same reference problem with outdated EUROCAE documents also exists with the cockpit voice recorder (CVR) requirements. TC is in the process of revising the CVR requirements in CAR Standard 625, Appendix C, and providing the appropriate reference to the latest EUROCAE documents. Once this regulatory development has been completed for the CVR requirements, TC will begin to develop the necessary regulatory changes to update the FDR requirements.
4.1.5. NAV CANADA
On 05 September 2012, NAV CANADA responded to the information presented by the TSB regarding navigational products, and communicated the following:
The spot height depiction was added at a time when the extraction and placement of data was done by manual methods. The location is within current tolerances based on the scale of the product. NAV CANADA is now using a set of technologies for completing procedure design and adding topographic data to instrument procedures. All of the approach charts will be reviewed and updated using these tools from January through August 2013.
The magnetic variation at CYRB and all other northern sites has been updated. NAV CANADA is changing from a date-driven update system to a system that is triggered by a magnetic variation tolerance value.
4.2. Safety action required
4.2.1. Unstable approaches
In this accident, the aircraft arrived high and fast on final approach, was not configured for landing on a timely basis, had not intercepted the localizer and was diverging to the right. This approach was not considered stabilized in accordance with the company's stabilized approach criteria, and the situation required a go-around. Instead, the approach was continued. When the crew initiated a go-around, it was too late to avoid the impact with terrain. Unstable approaches continue to be a high risk to safe flight operations in Canada and worldwide.
Flight Safety Foundation research concludedFootnote 172 that 3.5% to 4% of approaches are unstable. Of these, 97% are continued to a landing, with only 3% resulting in a go-around. To put these figures in context, there were, in 2012, 24.4 million flights worldwide in a fleet of civilian, commercial, western-built jet airplanes heavier than 60 000 pounds. This means that between 854 000 and 976 000 of those flights terminated with an unstable approach, and approximately 828 000 to 945 000 continued to a landing. The potential negative consequences of continuing an unstable approach to a landing include controlled flight into terrain (CFIT), runway overruns, landing short of the runway, and tail-strike accidents.
Occurrences in which an unstable approach was a contributing factor demonstrate that the severity can range from no injuries or damage to multiple fatalities and aircraft destruction. In Resolute Bay, the continuation of an unstable approach led to a CFIT accident and the loss of 12 lives. Without improvements in stable approach policy compliance, most unstable approaches will continue to a landing, increasing the risk of CFIT and approach and landing accidents.
In this investigation, the Board examined in detail the defences available to air carriers to mitigate the risks associated with unstable approaches and their consequences. These mainly administrative defences include:
A company stabilized-approach policy, including no-fault go-around policy;
Operationalized stable approach criteria and standard operating procedures (SOPs), including crew phraseology;
Effective crew resource management (CRM), including empowering of first officers to take control in an unsafe situation;
Use of flight data monitoring (FDM) programs to monitor SOP compliance with stabilized approach criteria;
Use of line-oriented safety audits (LOSA) or other means, such as proficiency and line checks, to assess CRM practices and identify crew adaptations of SOPs;
Non-punitive reporting systems (to report occurrences or unsafe practices);
Use of terrain awareness and warning systems (TAWS).
While First Air had some of these defences in place, including a stabilized approach policy and criteria, a no-fault go-around policy, safety management system (SMS) hazard and occurrence reporting, the two-communication rule and an older-generation ground proximity warning system (GPWS), these defences were not robust enough to prevent the continuation of the unstable approach or collision with terrain. Other TSB investigations have shown that non-adherence to company SOPs related to stabilized approaches is not unique to First Air.
In addition, the use of newer-generation TAWS with forward-looking terrain avoidance features will enhance a flight crew's situational awareness and provide increased time for crew reaction. However, if the risk in the system is to be reduced significantly, the industry must take other steps and not rely on purely technological solutions.
The first step is for operators to have practical and explicit policies, criteria, and SOPs for stabilized approach that are enshrined in the company operating culture.
The second step is for companies to have contemporary initial and recurrent CRM training programs delivered by qualified trainers and to monitor and reinforce effective CRM skills in day-to-day flight operations. Effective CRM is a defence against risks present in all phases of flight, including unstable approaches.
The third step involves monitoring of SOP compliance through programs such as flight data monitoring (FDM) and line-oriented safety audits (LOSA). In Canada, TC requires large commercial carriers to have SMS, cockpit voice recorders (CVRs), and flight data recorders (FDRs). However, these carriers are not required to have an FDM program. Even so, many of these operators routinely download their flight data to conduct FDM of normal operations. Air carriers with flight data monitoring programs have used flight data to identify problems such as unstabilized approaches and rushed approaches, exceedance of flap limit speeds, excessive bank angles after take-off, engine over-temperature events, exceedance of recommended speed thresholds, GPWS/TAWS warnings, onset of stall conditions, excessive rates of rotation, glide path excursions, and vertical acceleration.
FDM has been implemented in many countries, and it is widely recognized as a cost-effective tool for improving safety. In the United States and Europe—thanks to ICAO—many carriers have had the program for years. Some helicopter operators have it already, and the Federal Aviation Administration (FAA) has recommended it.
Worldwide, FDM has proven to benefit safety by giving operators the tools to look carefully at individual flights and, ultimately, at the operation of their fleets over time. This review of objective data, especially as an integral and non-punitive component of a company safety management system, has proven beneficial in proactive identification and correction of safety deficiencies and in prevention of accidents.
Current defences against continuing unstable approaches have proven less than adequate. In Canada, while many CAR 705 operators have voluntarily implemented FDM programs, there is no requirement to do so. First Air was not conducting FDM at the time of this accident. Furthermore, FDM programs must specifically look at why unstable approaches are occurring, how crews handle them, whether or not crews comply with company stabilized-approach criteria and procedures, and why crews continue an unstable approach to a landing. Unless further action is taken to reduce the incidence of unstable approaches that continue to a landing, the risk of approach and landing accidents will persist.
Therefore, the Board recommends (A14-01) that:
Transport Canada require CARs Subpart 705 operators to monitor and reduce the incidence of unstable approaches that continue to a landing. Transportation Safety Recommendation A14-01
4.3. Safety concern
4.3.1. Crew resource management training standards
In this accident, the crew became task-saturated during the final approach, and did not maintain a shared situational awareness. As the unstable approach continued, the crew's CRM was ineffective. The first officer made many attempts to communicate his concerns and suggest a go-around. In the absence of clear policies or procedures allowing a first officer to take control, this first officer likely felt inhibited from doing so.
First Air's CRM training program had been approved by TC in accordance with the existing CRM training standard. However, following the accident, TSB investigators attended a First Air initial CRM training course and identified that the actual training delivered did not contain all of the subjects outlined in CASS 725.124(39). The CRM training material was delivered in a period of several hours of one day, along with other subjects. The TC guidance material on which First Air's CRM training was based was intended to be delivered in 2 days. Neither of the company's primary CRM instructors had received any formal facilitator/instructor training or accreditation in teaching CRM.
First Air's initial and recurrent CRM training did not provide the crew of FAB6560 with sufficient practical strategies to assist with decision making and problem solving, communication, and workload management. This investigation found that if initial CRM training does not develop effective CRM skills, and if there is inadequate reinforcement of these skills during recurrent training, flight crews may not adequately manage risk on the flight deck. Furthermore, if operators do not take steps to ensure that flight crews routinely apply effective CRM practices during flight operations, risk to aviation safety will persist.
The investigation also identified a number of crew adaptations of company SOPs evident not only among the accident crew, but also within the Yellowknife B737 crew base, and which First Air's supervisory activities had not detected. SOP adaptations on FAB6560 resulted in ineffective crew communication, escalated workload leading to task saturation, and breakdown in shared situational awareness.
During every flight, pilots must successfully interact with each other, their aircraft, and their environment, using associated checklists and company SOPs to effectively manage threats, errors, or undesired aircraft states that may be encountered. This goal is accomplished by training flight crews to employ a variety of strategies to help improve effectiveness. CRM is a defence against risks present in all phases of flight, including unstable approaches. Some pilots may not adequately manage operational risk as a result of ineffective CRM skills.
There are a variety of CRM standards and regulations in place throughout the world. Despite these differences, there is a general consensus in the aviation community that CRM programs should consist of 3 distinct phases. The first phase is indoctrination and awareness training. The second phase is practice, feedback, and recurrent training. In recent years, there has been increased recognition that CRM training would be more effective if it was integrated with technical training from the earliest stages of the aircrew training regime. CRM training programs that include recurrent training and the actual practice of CRM strategies have been shown to produce significant changes in flight crew performance during line-oriented flight training sessions and during flights. The third phase is continuing reinforcement. An effective method of continual reinforcement is to embed critical CRM skills and behaviours within company SOPs to make CRM an integral part of all training and operations. In summary, the acquisition and maintenance of effective CRM skills depends on receiving contemporary initial and recurrent CRM training delivered by suitably qualified trainers, and ongoing performance monitoring and reinforcement during routine flight operations.
The TSB has previously released a recommendation (A09-02) and issued Findings as to RiskFootnote 173 related to the provision of CRM training to Part VII commercial operators, CRM training standards, and instructor qualifications. In Canada, the current CRM training standard does not incorporate the more modern concepts of threat and error management. There are no experience, training, or qualification requirements needed to teach CRM. In contrast, the United Kingdom Civil Aviation Authority (CAA) has established a series of stringent accreditation requirements for CRM instructors and instructor examiners.
Despite the fact that the CRM regulations in Canada have not been updated to reflect modern CRM concepts, some of these concepts have already been integrated into other TC-led programs. For example, the Advanced Qualification Program, the Approved Check Pilot program, and the Multi-Crew Pilot Licence place considerable emphasis on threat-and-error management concepts and strategies. In addition, each of these programs also highlights the importance of being able to evaluate these skills as part of a proficiency-based training program.
TC has initiated some additional mitigation measures. A focus group consisting of TC and industry representatives met in January 2012 and submitted a final report in February 2012. The report proposed components of a contemporary CRM training standard for Part VII commercial operators but recommended against a set time for CRM course duration and any formal accreditation for CRM instructors. The Civil Aviation Regulatory Committee (CARC) accepted the TC focus group recommendations (see section 1.17.7.3), and on 24 April 2012, directed that a contemporary CRM training regulation and standard should be developed for CAR Subparts 702, 703, 704, and 705.
It is not yet known how detailed TC's new training standard and guidance material will be compared to the existing standard, or when the new standard will come into effect. Nor is it known how TC will ensure that operators apply the new training standard to ensure that flight crews acquire and maintain effective CRM skills.
Therefore, the Board is concerned that, without a comprehensive and integrated approach to CRM by TC and aviation operators, flight crews may not routinely practise effective CRM.
This report concludes the Transportation Safety Board's investigation into this occurrence. Consequently, the Board authorized the release of this report on . It was officially released on .
Appendices
Appendix A – FAB6560 sequence of events
(Please refer to Appendix X – List of acronyms and abbreviations.)
Sequence of events
UTC
Event
1355:53
NAV CANADA ATC issues the following IFR clearance to FAB6560: Cleared to CYRB via the CYZF SID 1 departure, flight planned route, squawk 4625.
1440
FAB6560 departs from CYZF.
1450
FAB6560 enters Northern Domestic Airspace approximately at RIBUN.
1455
FAB6560 flight crew receives CYRB 1450 SPECI from company dispatcher.
1456:51
FAB6560 levels at FL310.
1458:57
Beginning of valid data on FDR
1510
FAB6560 flight crew receives CYRB 1500 METAR from company dispatcher.
1511
Joint flight crew and dispatcher decision for flight to proceed to CYRB
1548:25
FAB6560 turns left from CB to 72°N, 100°45′W.
1609:20
FAB6560 flight crew receives CYRB 160 METAR.
1610:43
Beginning of CVR recording
1614:59
to
1616:24
Pilots discuss loading CYRB RNAV 35T approach into GPS flight plans, selecting ESTAP initial approach fix, and flying direct to MUSAT waypoint.
1615:24
Captain describes his plan to transition onto the localizer using RNAV and then switch over to ILS.
1615:27
FO concurs with captain's plan.
1616:45
Pilots select direct to MUSAT on GPS; FAB6560 turns right to fly direct to MUSAT.
1617:08
CVR begins to record IRB DME Morse code idents, repeated every 32.3 seconds.
1617:11
Captain conducts approach briefing.
1617:41
FO makes comment about high ground speed.
1617:44
Captain states he plans to commence descent 105 miles from CYRB.
1618:40
FO calls CYRB military terminal; does not receive a response.
1622:16
FO calls the NAV CANADA Edmonton ACC, requests descent clearance, does not receive a response.
1622:47
FO calls the NAV CANADA Edmonton ACC, states radio frequency used, does not receive a response.
1623:12
FO calls the NAV CANADA Edmonton ACC, states radio frequency used.
1623:17
NAV CANADA Edmonton ACC responds, instructs FAB6560 to advise when requesting descent.
1623:21
FO advises the NAV CANADA Edmonton ACC that FAB6560 requesting descent.
1623:29
NAV CANADA Edmonton ACC clears FAB6560 to descend out of controlled high-level airspace in vicinity of CYRB, instructs crew to report through FL270.
1623:40
Captain commences descent from FL310.
1623:41
FO reads back descent clearance and acknowledges instruction to report through FL270.
1623:51
NAV CANADA Edmonton ACC advises FAB6560 of military activity in the area and that they can anticipate switching to CYRB military terminal after leaving FL270.
1624:02
FO acknowledges advisory, states frequency for CYRB military terminal.
1624:11
NAV CANADA Edmonton ACC confirms that frequency for CYRB military terminal is correct, advises FAB6560 that CYRB military terminal is controlling airspace FL200 and below, and that airspace between FL270 and FL200 is uncontrolled.
1624:27
Captain calls for pre-descent check.
1624:31
FO makes 2 cabin chimes.
1624:32
FO commences pre-descent check.
1624:37
Captain briefs bugs set for VREF 132 knots for flaps 40.
1624:39
FO briefs bugs set for VREF 132 for flaps 40, calls compass challenge from checklist.
1624:42
Captain responds to compass challenge with “Sync mag cross-check.”
1624:43
FO points out captain stated “mag”.
1624:43
Captain responds with “Sync DG cross-check,” states that he is doing a check and shows “twenty nine true”.
1625:01
Captain queries FO as to his reading.
1625:04
FO responds with “Zero three zero.”
1625:07
No. 2 compass adjusted.
1625:13
FO states “Sync DG cross-checked.”
1625:14
FO calls pre-descent complete.
1626:03
FO calls NAV CANADA Edmonton ACC, reports through FL260.
1626:11
NAV CANADA Edmonton ACC acknowledges, instructs FAB6560 to contact CYRB military terminal.
1626:27
FO makes initial call to CYRB military terminal.
1626:42
CYRB military terminal responds to call, requests that aircraft calling repeat transmission.
1626:46
FO repeats call to CYRB military terminal.
1627:01
CYRB military terminal responds.
1627:09
FO calls CYRB military terminal, advises that reception poor and they will call closer to CYRB. Provides CYRB ETA 1643 and advises planning Runway 35.
1627:35
CYRB military terminal acknowledges transmission, instructs FAB6560 to try again in a few miles when communication will be better.
1628:43
Captain advises FO that they are descending through FL200.
1628:49
Captain states altimeter setting 29.81.
1629:21
FO advises CYRB company base that their ETA for the ramp is 1645 and that they will need fuel.
1629:49
FO calls CYRB military terminal.
1629:57
CYRB military terminal responds.
1630:02
FO queries CYRB military terminal as to whether they received FAB6560 ETA and planned runway.
1630:09
CYRB military terminal advises FAB6560 that they received the previous information and that military terminal control unit is not operational and providing only clearance delivery.
1630:11
CYRB military terminal provides traffic information about a second flight 50 miles southeast of CYRB at 10 000 feet inbound to CYRB.
1630:15
CYRB military terminal instructs FAB6560 to contact CYRB military tower.
1630:31
FO acknowledges traffic and instruction to contact CYRB military tower.
1630:50
FO calls CYRB military tower.
1630:56
CYRB military tower responds, provides altimeter setting 29.81.
1631:45
CYRB military tower instructs FAB6560 to report final for Runway 35T, advises wind estimated 160° at 10 knots.
1631:53
FO requests CYRB runway condition report from CYRB military tower.
1632:01
CYRB military tower advises FAB6560 that the runway is a little wet, and no other aircraft have used it during the morning.
1632:07
FO acknowledges runway condition report.
1632:35
FAB6560 descends through 10 000 feet.
1632:46
Captain calls for in-range check.
1632:48
FO verbalizes: seatbelt signs on, anti-ice on, gravel protect on, air conditioning and pressurization set for landing.
1633:09
Captain instructs FO to hold the remaining items on the checklist.
1633:14
One of the pilots calls through 10 000 feet.
1636:23
Captain instructs FO to continue in-range check below the line.
1636:33
FO calls NAV instruments.
1636:35
Captain responds “VHF NAV.”
1636:38
FO responds “VHF NAV.”
1637:00
FO calls in-range check complete.
1637:25
Captain calls for flaps 1.
1637:40
FO calls flaps 1, green light.
1637:42
Captain calls flaps 5 landing check.
1637:47
FO calls flaps 5 selected.
1637:51
FO acknowledges landing check call and initiates landing check.
1637:53
Two cabin chimes
1638:05
FO states landing check done to gear and flaps.
1638:20
FO calls localizer alive.
1638:21
FAB6560 begins left turn.
1638:25
FO calls glideslope alive.
1638:32
FO advises CYRB military tower that FAB6560 is 10 miles final for 35.
1638:38
Captain calls for gear down.
1638:39
CYRB military tower instructs FAB6560 to report 3 miles final.
1638:42
Captain calls for flaps 15.
1638:46
FO requests that CYRB military tower repeat previous transmission.
1638:48
FO calls gear down, 3 green.
1638:49
to
1638:57
Control wheel movements occur.
1638:49
CYRB military tower instructs FAB6560 to report 3 miles final.
1638:53
FO acknowledges instruction.
1638:55
FO calls flaps 15, green light.
1639:05
FAB6560 rolls wings-level.
1639:10
Altitude alerter tone at 320 feet asl
1639:13
to
1639:30
FO makes 5 statements regarding aircraft lateral displacement from desired track.
1639:18
Control wheel movement occurs.
1639:33
to
1639:37
Captain makes 2 statements indicating satisfaction that autopilot is tracking properly.
1639:36
Control wheel movement occurs.
1639:46
FO makes statement about track deviation displayed on GPS.
1639:49
KBA909 advises CYRB military tower that they plan BCRS 17T in 5 minutes.
1639:52
Altitude alerter tone at 1950 feet asl
1639:57
FO states they are not on auto approach, just on the flight director.
1640:04
Thrust begins to increase from idle to 1.4 EPR.
1640:07
FO queries captain to confirm full deflection.
1640:08
Captain concurs, and questions why full deflection when they are on the localizer.
1640:11
FO states they are not on the localizer.
1640:14
Captain states “It's captured; ten three is the localizer?”
1640:17
FO disagrees on localizer capture and reminds captain about the hill to the right of the runway.
1640:23
FO states GPS is also showing to the right.
1640:25
FO questions captain as to whether they did something wrong.
1640:30
FO states opinion that they should abandon the approach and then solve the navigational problem.
1640:33
Captain indicates that he plans to continue the approach.
1640:35
FO acknowledges captain's plan to continue the approach.
1640:36
FAB6560 descends through 1000 feet above field elevation. Stabilized approach criteria become applicable.
1640:41
FO states, “We're 3 mile final; we're not configged.”
1640:45
Captain calls for flaps 25.
1640:49
FO reports full deflection on the GPS too.
1640:52
FO recommends corrective action—go left.
1640:54
Captain indicates that he can't go left.
1640:55
KBA909 enters CYRB Class D control zone from southeast.
1640:56
FO begins to make advisory statement regarding track.
1640:57
Captain interrupts FO statement by calling for flaps 30.
1640:59
to
1641:08.3
Captain and FO discuss configuration and displays of flight director, GPS, and autopilot.
1641:05
Thrust begins to increase from about 1.08 EPR to 1.47 EPR.
1641:08.3
FO states “So let's just …”
1641:08.7
Captain interrupts FO statement by calling for flaps 40.
1641:10.1
FO calls green light, gear down, 3 green.
1641:11.2
Captain calls flaps 40, green light.
1641:16.3
Captain makes statement indicating similar situation happened to another pilot previously.
1641:18
Pitch begins to decrease from +2° to −4.8°.
1641:26.3
Captain makes statement regarding presence of the glideslope indicator.
1641:28.3
FO states glideslope is fully deflected.
1641:30.8
FO advises CYRB military tower that FAB6560 is 3 final.
1641:33.1
CYRB military tower advises that wind is estimated 150° at 7 knots, clears FAB6560 to land Runway 35T.
1641:39.4
FO makes incomplete transmission to CYRB military tower.
1641:41.1
FO states “Just over the shoreline.”
1641:43.2
FO utters expletive.
1641:46
Pitch begins to increase from −5°.
1641:46.6
FO calls captain by first name, states “I don't like this.”
1641:47.1
CYRB military tower requests that FAB6560 repeat last transmission.
1641:47.7
GPWS: “Sink rate”
1641:49.0
FO states “Go for it.”
1641:49.2
GPWS: “Minimums”
1641:50.1
FO states “Go around.”
1641:50.7
GPWS: “Minimums”
1641:51.2
Captain calls “Go-around thrust.”
1641:51.8
FAB6560 collides with terrain.
Appendix B – Approach procedure chart for instrument approach based on area navigation using global navigation satellite at Runway 35 TRUE
From NAV CANADA, Canada Air Pilot (CAP), CAP 1: Yukon, Northwest Territories and Nunavut (effective 30 June 2011)
Appendix E – C-GNWN compass systems: additional information
Compass transfer switch
In the event of a compass failure, use of the compass transfer switch enables the remaining compass to provide heading information to both pilot's instruments. This switch is located on the captain's side of the overhead panel, adjacent to the VHF NAV (very high frequency navigation) selector switch.
C-GNWN compass system heading distribution
With the compass transfer switch in the NORMAL position, heading information distribution is as follows:
Heading information from no. 1 directional gyro (DG) is displayed on the captain's radio-magnetic indicator (RMI), which then repeats this information to the first officer's (FO's) horizontal situation indicator (HSI) and to the VHF navigation system. The information supplied by no. 1 DG through the captain's RMI controls the FO's HSI heading display and the “set course” and “set heading” signals. The set-course and set-heading signals are then fed to the flight director's steering computer 2.
Heading information from no. 2 DG is displayed on the FO's RMI, which then repeats this information to the captain's HSI and to the flight data recorder. The information supplied through no. 2 DG through the FO's RMI controls the display on the captain's HSI heading display, and is also used by the captain's HSI for the set-course and set-heading signals. The set-course and set-heading signals are then fed to the autopilot and to the flight director's steering computer 1.
Flux valve and compass controller
Flux valves sense the direction of the earth's magnetic field. With the compass controller (Figure 20) MAG/DG switch in the MAG (magnetic) position, the flux valves are used to align the DG output with magnetic north and provide a stable magnetic compass system. In this mode, the compass system compensates for real and apparent gyro precession.
However, in the vicinity of the earth's magnetic poles, magnetic compass systems are susceptible to error and are not suitable for navigation. When operating in these areas of compass unreliability, alternate methods of navigation must be used. These methods include operating the aircraft's DGs in a free gyro mode with reference to true rather than magnetic north.
With the MAG/DG switch in the DG position, the flux valve input is removed from the C-11B compass system. The DG heading output is no longer slaved to magnetic north, and the compass system reverts to a free gyro. In free gyro mode, the system is subject to the real and apparent precession of the DG.
The compass controller includes an adjustable latitude compensator. To neutralize earth rate precession, pilots must set the correct latitude on this compensator as the flight progresses. The compass controller also has a latitude transfer switch to adjust dependent on whether the aircraft is flying in the northern or southern hemisphere.
Instrument comparator
An instrument warning system is installed which compares the captain's and FO's compass headings, pitch and roll attitude indications, and localizer and glideslope deviation outputs from the no. 1 and no. 2 VHF NAV units. An instrument comparator annunciator (Photo 6) is located above each pilot's instrument display.
For heading information, the comparator will illuminate amber lights on both annunciators when the difference between the no. 1 and no. 2 compasses exceeds the following tolerances:
The upper right knob on each RMI is the compass synchronizing control, which permits the pilot to synchronize the RMI with the applicable compass system (Figure 21).
The HSI displays aircraft position and heading with respect to magnetic or true north, selected heading, DME (distance measuring equipment), lateral deviation to or from a selected VOR (VHF omnidirectional range) or localizer course, and vertical deviation from the centre of a glideslope beam (Figure 22).
The fixed aircraft symbol displays aircraft position and heading in relation to the azimuth card, course deviation bar, and selected heading. The rotating azimuth card displays heading information from the compass system. Aircraft heading is read on the card beneath the lubber line at the top centre of the instrument.
The heading bug is set to the desired heading on the azimuth card. Once set, the heading bug rotates with the azimuth card. The course pointer is set to the desired VOR radial or localizer course on the azimuth card. Once set, the course pointer rotates with the azimuth card.
The course deviation bar represents the centre of the selected VOR or localizer course, and displays course deviation. The course deviation bar is read with respect to the aircraft reference symbol, providing the pilot with information regarding lateral deviation from the selected course and which direction to turn for corrections to course deviations.
When the navigation receiver is tuned to a localizer frequency, initial movement of the course deviation bar begins at angular deviations from 2.4° to 4.0° from the centre of the localizer course, depending on beam width for a particular instrument landing system (ILS) installation. The 2-dot linear portion of the course deviation scale represents 2.5° angular deviation, depending on the particular ILS installation.Footnote 175
Appendix F – C-GNWN autopilot system: additional information
Autopilot mode control panel
The autopilot has 2 channels: 1 pitch channel and 1 roll channel. The pitch and roll functions are separate and are housed in separate analog electronic boxes in the electronics bay.
Autopilot engage switches
The autopilot mode control panel (AP MCP) has 2 engage paddle switches: 1 for the roll channel and 1 for the pitch channel (Photo 7). Each paddle switch is spring-loaded to the disengage position, and is solenoid-held in the engaged position when certain conditions are met. The pitch and roll channels may be operated independently of one another. The default engage state is manual CWS (control wheel steering) mode for both pitch and roll. The aircraft will maintain the pitch attitude at the time of engagement. Automatic stabilizer trim, which is a function of the pitch channel, compensates for changes in aircraft trim.
The autopilot pitch mode selector is a rotary switch located on the right side of the AP MCP, with 3 positions: TURB, OFF, and ALT HOLD. The switch is spring-loaded to the OFF position, and is solenoid-held in the other positions if system interlocks are maintained. Each of the pitch submodes is described below.
OFF − operates in manual pitch CWS.
TURB − for use in turbulent conditions to reduce gust loads.
ALT HOLD − maintains the pressure altitude on the captain’s altimeter at the time this mode is selected.
Autopilot mode selector
The autopilot mode selector is a rotary switch located on the left side of the AP MCP, with 4 positions: MAN, VOR/LOC, AUTO APP and MAN G/S. The switch is spring-loaded to the MAN position and is solenoid-held in the 3 other positions if system interlocks are maintained. When the roll channel changes mode from these 3 positions, the switch will automatically return to the MAN position. Exceeding the CWS high detent force after VOR or localizer ON COURSE will also cause the switch to revert to the MAN position.
Each of the autopilot modes is described below:
MAN − The autopilot operates in manual roll CWS and is used in conjunction with the HDG select switch to achieve the following roll submodes: HDG HOLD, HDG SEL, and HDG OFF. Operation of each of these submodes is described further below, under Autopilot Heading Switch.
VOR/LOC − The autopilot uses the VOR (VHF omnidirectional range) or LOC (localizer) signal selected on the NAV radio to control the roll channel, and will automatically intercept and track LOC or VOR. The captain’s HSI is used to select heading and course. Crosswind compensation occurs after ON COURSE.
AUTO APP − The autopilot uses the instrument landing system (ILS) selected on the NAV radio and will automatically capture and track both localizer (roll channel) and glideslope (pitch channel).
MAN G/S (manual glideslope) − The autopilot uses the ILS selected on the NAV radio and will automatically capture and track localizer (roll channel). This mode is used to manually capture G/S using pitch CWS from above or to recapture after autopilot disengagement. When selected, the airplane pitches down for 10 seconds (700 feet per minute), then tracks G/S.
Autopilot heading switch
The heading switch has 3 positions. The switch is spring-loaded to the centre position (HDG HOLD), and is solenoid-held in the up (HDG OFF) and down (HDG SEL) positions if system interlocks are maintained. Each of the heading submodes is described below:
HDG OFF – Heading off submode is used when autopilot is in roll CWS mode. It maintains any bank attitude within limits.
HDG HOLD − Heading hold submode is obtained when the roll axis is engaged at a bank angle of less than 5°, or any time the navigation mode is selected in MANUAL position, the heading select switch is in centre position (HDG HOLD), CWS input is zero, and the bank angle is less than 5°. If a CWS roll input in excess of the detent force is made, the aircraft will roll in the direction of the force at a rate proportional to the force. When the CWS force is released, aircraft response depends on bank angle at the time of release. If the bank angle is less than 5°, the aircraft will roll wings-level and maintain heading; if the bank angle is greater than 5°, the aircraft will maintain bank angle.
HDG SEL – Heading select submode uses the selected heading data from the HDG bug on the captain’s HSI. It places the autopilot roll channel in high detent. If high detent force is exceeded, the switch will trip to centre position. In VOR/LOC mode, the switch will trip to HDG HOLD position once the selected course is captured.
Control wheel steering
The aircraft operations manual (AOM) Volume 2 describes CWS as follows:Footnote 176
CWS operates in low or high detent level, depending on which modes or submodes are active:
MAN Mode
CWS pitch and roll are low detent unless various submodes are active (see below)
VOR/LOC Mode
CWS pitch and roll are low detent until VOR or localizer ON COURSE. CWS roll then becomes high detent, and CWS pitch remains low detent unless ALT HOLD is active. CWS roll may be used to override during the capture phase until ON COURSE. Exceeding high detent in roll reverts the autopilot to MAN.
[…]
ALT HOLD Submode
CWS pitch is high detent. Exceeding high detent will revert the Pitch Mode Selector Switch to OFF.
HDG HOLD/HDG OFF Submodes
CWS roll is low detent.
HDG SEL Submode
CWS roll is high detent. Exceeding high detent causes the heading switch to move to the center (HEADING HOLD) position.
Appendix H – FD-108 flight director system: additional information
Flight director mode control panel
There were 2 flight director (FD) mode control panels (MCPs) installed on the glareshield: one for the captain's FD system and the other for the FO's FD system. Each FD MCP contains controls for the roll channel and the pitch channel via a MODE SEL (mode selection) switch, ALT HOLD (altitude hold) switch, and PITCH CMD (pitch command) knob (Photo 8). The roll and pitch controls select the signals provided to the command bars in the attitude director indicator (ADI).
The command bars in the ADI display the computed commands to maintain the selected roll angle. The FD roll MODE SEL switch has the following positions and operating limitations:
GA (go around) provides wings-level roll command with 14° pitch command until another mode is selected.
OFF removes the command bars from ADI.
HDG provides command bar guidance to fly the selected heading on the HSI. In HDG mode, the steering command is limited to 30° in roll and 12° in pitch.
VOR/LOC is used to capture and track a VOR radial or localizer. VOR/LOC has 3 submodes:
Intercept – Amber APD (approach progress display) VOR/LOC light illuminated, command bars provide guidance to fly to and maintain the selected heading on the HSI.
Capture – Green APD VOR/LOC light illuminated, command bars provide guidance to fly to and maintain the VOR radial or localizer course selected on the HSI. This guidance is displayed in the form of commanded bank angles. The command bars return to wings-level once the FD determines the resultant heading provides a sufficient intercept angle to the selected course. For localizer, this mode change occurs at 2.5° from localizer centreline. Bank angle command limit is ±30°.
On course – Green APD VOR/LOC light illuminated, command bars provide guidance to maintain the VOR radial or localizer course selected on the HSI. Bank angle command limit is ±8° and roll rate limit is 7° per second.
AUTO APP includes VOR LOC mode with the addition of a pitch command providing vertical guidance to fly to and maintain the glideslope.
MAN GS is used to manually capture glideslope. Automatic sensing of glideslope signal is disabled.
Flight director mode control – pitch
The command bars in the ADI display the computed commands to maintain the selected pitch angle. The MCP has the following pitch controls:
Altitude Hold switch – ON/OFF
PITCH CMD knob selects a fixed pitch angle for climb or descent within the range −10° to +15°
When the FD MCP roll switch is in AUTO APP, the glideslope signal is used to control pitch.
Approach progress display annunciators
The APDs provide annunciation of the autopilot and flight director systems armed and capture status for different operating modes. Each APD has 1 column of annunciators on the left side for the flight director and a second column on the right for the autopilot. The APDs were modified from the original configuration to include a GPS annunciator at the bottom of the autopilot column (Figure 24).
The 2 APDs will not necessarily display the exact same annunciations at all times because they are each connected to separate systems and are displaying information from different sources. For example, it is possible that the captain's FD APD shows VOR/LOC as green when the FO's FD APD shows VOR/LOC as amber because one system may have captured the localizer beam whereas the second receiver has not yet captured due to slight variations in the sensitivities of the equipment.
FD modes are annunciated on the left side of the APD. On the accident aircraft, the following APD annunciators were applicable to the FD system:
VOR/LOC
Illuminates amber when VOR/LOC or AUTO APP mode is selected on the FD MCP
Illuminates green when VOR or LOC signal is captured (less than 2.5° from localizer centreline)
GLIDE SLOPE
Illuminates amber when AUTO APP mode is selected on the FD MCP
Illuminates green when glideslope signal is captured (less than 2 dots)
GO AROUND
Illuminates green when GA mode is selected.
Autopilot modes are annunciated on the right side of the APD. On the accident aircraft, the following APD annunciators were applicable to the autopilot:
VOR/LOC
Illuminates amber when VOR/LOC or AUTO APP selected on the MCP and VOR or LOC not captured
Illuminates green when VOR/LOC or AUTO APP selected on the MCP and VOR or LOC signal is captured (less than 2 dots)
GLIDE SLOPE
Illuminates amber when AUTO APP mode is selected on the MCP and glideslope not captured
Illuminates green when AUTO APP mode is selected on the MCP and glideslope signal is captured (less than 2 dots)
Illuminates green if MAN G/S selected on the MCP
If illuminated green, changes to amber if the aircraft localizer deviation exceeds 2 dots
GPS
Illuminates green when both MD-41 annunciator control unit no. 1 is selected to GPS and the GPS autopilot select switch is set to A/P ON GPS
Extinguishes if either of these switches is deselected
NOTE: Given that the aircraft left the localizer beam, the results obtained from the glideslope calculation are mathematical, were used for illustrative purposes only, and may not be what the aircraft instruments would have shown, as the aircraft may not have been within receiving range of the antenna’s signal.
Appendix Q – First Air procedures for autopilot operation in MAN mode
First Air procedures for autopilot operation in MAN mode are as follows in the flight operations manual:Footnote 178
To Maneuver in Pitch and Roll
Use CWS at a force greater than low detent level. When CWS pitch force is relaxed below low detent level, airplane will maintain existing pitch attitude. When CWS roll force is relaxed below low detent level, if bank angle less than 5°, airplane will roll wings level and maintain heading. If bank angle greater than 5°, airplane will maintain bank angle.
To Maintain Bank Angles Less than 5°
Autopilot Heading Switch ·································································································· HDG OFF
When CWS roll force is relaxed below low detent level, the airplane maintains the existing bank angle. Return the Autopilot Heading Switch to center to remove this submode.
To Maneuver in Roll and Hold Altitude
Pitch Mode Selector ········································································································ ALT HOLD
Use CWS to induce roll at low detent level force. Altitude is maintained by input from the air data computer at the time Pitch Mode Selector is positioned to ALT HOLD position. CWS pitch input greater than high detent level will trip Pitch Mode Selector to OFF.
To Maneuver In Pitch and Hold Heading
Autopilot Heading Switch ···································································································· HDG SEL
Use CWS to control pitch attitude at low detent level. The airplane turns to and maintains the heading selected on HSI with the Autopilot Heading Switch in HDG SEL. CWS roll input greater than high detent level trips the Autopilot Heading Switch to the centre position.
Appendix R – Instrument landing system intercept for autopilot VOR/LOC mode
Instrument landing system intercept for autopilot VOR/LOC mode
Appendix T – First Air compass operating policy and procedures for Northern Domestic Airspace
Policy for operations in Northern Domestic Airspace
First Air's policy for Northern Domestic Airspace (NDA) operations is stated as follows in the flight operations manual:Footnote 179
Navigation in Northern Domestic Airspace: Routes and approach procedures conducted in Northern Domestic Airspace are published degrees true.
Crews must navigate in accordance with the regulations and operating procedures outlined in this manual.
Crews will identify their tracks as “true” when broadcasting required MF [mandatory frequency] reports in uncontrolled airspace.
Be aware that other aircraft may or may not be adhering to the required operating practice.
Canadian Aviation Regulations require aircraft operating in Northern Domestic Airspace to be equipped with a means of establishing direction that is not dependant on a magnetic source. Even though First Air Aircraft are equipped with GPS, this alone is not capable of establishing direction.
There are only 2 reliable means of establishing direction. These are:
Use of GPS in combination with an ADF/NDB bearing; or, where this is not possible; and
Use of an Astro Compass and Air Almanac to obtain a sun/star shot.
Note: Use of the Astro Compass /Air Almanac should only be necessary when in an area without sufficient NDB coverage or when both GPS (one in HS748) are unserviceable.
Procedures for obtaining true heading using GPS and non-directional beacon
The aircraft operations manual provides specific procedural guidance to B737 crews for operation of the compass and navigational systems. The manual advises, “When operating in TRUE it is recommended that verification of TRUE heading be accomplished over each waypoint, before descent, and whenever verification is considered appropriate,”Footnote 180 and “Comparing GPS data to RMI ADF indication can be used to set true heading but this may not be as accurate as using the astrocompass.”Footnote 181 The procedures for obtaining true heading using GPS and NDB are as follows:Footnote 182
Tune NDB, ensure strong signal and steady RMI ADF indication,
Key in NDB identifier on lower line display or use nearest function,
Ensure compass MAG/DG switch is DG,
Observe GPS BRG/D data, if BRG is not TRUE, select AUX FUNCTIONS (MSG then “↑” key), DISPLAY OPT and select TRUE.
Slew compass so the head of the ADF needle points to GPS displayed bearing to the NDB.
Note: The compass heading will correspond to present longitude
The procedure description identifies that use of an NDB and ADF to obtain bearings is less accurate than use of an astro compass because of various factors that can reduce non-directional beacon (NDB)/ automatic direction finding (ADF) accuracy.
Appendix U – First Air amplified checklist procedures
Amplified pre-descent checklist
The amplified pre-descent checklist provided in First Air's aircraft operations manual (AOM) is as follows:Footnote 183
Landing Data & Briefing ····································································· REVIEWED, BUGS SET PF/PNF
Complete the landing data card, conduct crew and approach plate briefings and set all bugs for landing.
EPR & IAS Bugs ············································································ CHECKED & SET VREF___ PF/PNF
Verify the airspeed index markers and the EPR cursors are set to the landing data card values.
Compasses ·········································································· SYNC, MAG/DG & X CHECKED PF/PNF
Verify all compass systems have been checked, are synchronized and have been cross-checked. Verify that compass systems are in MAG. (Magnetic or Slaved Position) or DG (free Gyro).
NOTE: 10,000 feet - Landing/Turnoff lights On.
During Daylight operations, the Runway Turnoff and Inboard Landing lights should be on pulse mode.
Use of outboard landing lights are at the Captain's discretion. Due to the increased drag and fuel burn, their use should be limited to the traffic pattern at night and/or to speeds below 250 knots.
During night or obscured weather operations, Turnoff, Inboard and Outboard Landing Lights should be used for landing. The Inboard and Outboard Landing Lights should be turned on no later than the FAF.
Amplified in-range checklist
Items above the dashed line are normally accomplished descending through 10 000 feet, and items below the dashed line are accomplished after navigational aids and flight directors have been set up, as briefed, for the intended approach.
The amplified in-range checklist provided in the AOM is as follows:Footnote 184
Seat Belt ························································································································ ON PNF
Gravel Protect Switch ········································································································ ON PNF
Air Cond & Pressurization ············································································ SET FOR LANDING PNF
Check cabin temperature normal. If landing airport temperature is higher or lower than normal, cabin should be pre-conditioned on descent to maintain appropriate cabin temperatures on the ground.
Check that the OFF SCHED DESCENT annunciator is extinguished.
Check that the cabin is descending to the arrival airport elevation.
The PNF will press and release the annunciator panel. Check that the annunciator panel lights and MASTER CAUTION lights illuminate. No lights should remain illuminated when the annunciator is released.
Speed Brake ·············································································· ARMED, GREEN LIGHT PF
Raise lever, move slightly aft to DETENT (ARM) position and observe SPEEDBRAKE ARMED annunciator illuminated.
If the amber SPEEDBRAKE DO NOT ARM light illuminates, or the green SPEEDBRAKE ARMED light does not illuminate, return the lever to DETENT and manually deploy the ground spoilers after touchdown.
Gear ································································································· DOWN, 3 GREEN PF/PNF
Verify the landing gear lever is positioned down and the 3 green landing gear down and locked indicator lights are illuminated.
Flaps ······························································································· ___ GREEN LIGHT PF/PNF
Ensure flap indication agrees with required landing flap.
Appendix V – Additional standard operating procedures and adaptations by First Air crews
Transfer of control
The aircraft operations manual (AOM) describes the company's transfer of control procedure as follows:Footnote 186
When transferring control of the aircraft, the PFFootnote 187 will state “Your Controls”. The PNF will state “My Controls” and assume PF duties. The PNF will grasp the control column prior to announcing “My Controls” if the auto-pilot is not engaged at time of control transfer.
Pilot interviews revealed that compliance with this procedure was generally good, although adaptations sometimes did occur during cruise, with hand signals or a tap on the control wheel used to signify the transfer of control. During flight FAB6560, a transfer of control occurred during cruise, but there were no verbal statements regarding the control transfers.
Landing data card and airspeed bug settings
The landing data card (Figure 25) is used to set and verify landing data. It is normally completed by the PNF before the normal pre-descent procedures. Normally, the PNF will review the landing data card information after the airspeed bugs are set and before the approach briefing.
First Air standard operating procedure for the B737 is to fly the recommended final approach speed (VAPP), which is VREF corrected for wind. Wind correction is ½ the steady headwind component plus all of the gust value, based on tower-reported winds. The maximum wind correction should not exceed 20 knots. This wind correction is added to the VREF. In light wind or tailwind conditions, a minimum of 5 knots is added to the VREF to obtain the VAPP.
Recommended airspeed marker (bug) settings are described in Figure 26. According to the AOM:Footnote 189
After the aircraft has been configured for landing with the gear down and landing flap. [sic] All airspeed callouts will be referenced to the airspeed internal Bug (“The Bug”) E.g. “Bug +5 or Bug −5”.
One External Bug at 210 knots ························································· Flaps UP manoeuvring speed
Altitude callouts
Standard altitude callouts are to be made when leaving one altitude for another, and at each 10000-foot interval. When leaving one altitude for another, the PF is required to call out “Out of (altitude) for (altitude)”, and the PNF responds with “Check.” At each 10 000-foot interval, the PNF is required to call out “(altitude) for (assigned altitude)”.
Pilot interviews revealed variable compliance with these callouts. Pilots reported using non-standard phraseology, and hand signals were sometimes used when the radios were in use.
Neither FAB6560 pilot made any verbal altitude callout when commencing descent from FL310 at 1623:40. There was no callout at FL300. At 1628:43, the captain made a non-standard altitude callout through FL200, but did not specify the altitude he was descending to. This call was made 4 seconds after the flight descended through FL200. At 1633:14, one of the pilots made a non-standard altitude callout through 10 000 feet, but did not specify the altitude he was descending to. This call was made 39 seconds after the flight descended through 10 000 feet.
Descent transition
FAB6560 was operating in the Standard Pressure Region from cruise altitude down to ground level. In the Standard Pressure Region, the altimeter shall be set to the current altimeter setting of the aerodrome of intended landing before commencing descent with the intention to land. In the southern portion of the country, altimeters would be set to the current altimeter setting as the flight entered the altimeter setting region descending through FL180.Footnote 192
The transition scan/flow is initiated when descending through transition level. Required items are resetting the captain's, FO's, and standby altimeters and the air conditioning panel baro subscale to local altimeter setting. The PNF standard callout for transition level is “Transition level altimeters reset ___ in”. There was no discussion of altimeter settings recorded before or during the descent of FAB6560 until 1628:49, when the captain stated the current altimeter setting for CYRB as 29.81 in. Hg. At this time, the flight was descending through FL196. The PNF did not use the required phraseology for transition level.
Communications radios
Pilots are required to advise the other pilot when not monitoring the primary radio. The other pilot will acknowledge this information and maintain a listening watch. When the pilot begins monitoring again, they shall be advised of changes to cleared routing and changes to the primary VHF radio.
Pilot interviews revealed that compliance with this procedure was generally good, although sometimes hand signals were used during high workload situations. During flight FAB6560, the FO verbally transferred the radios to and from the captain before and after conducting the passenger public address (PA) briefing at 1621:06. At 1628:37, when the FO switched to another radio to call the company's base at CYRB, there was no verbal transfer of the other radio before or after the communication.
15 000-foot and 10 000-foot scan/flow
The 15 000-foot scan/flow is initiated when descending through 15 000 feet. The only action item is for the PNF to start the APU (auxiliary power unit) if a BLEEDS OFF landing is anticipated. FAB6560 descended through 15 000 feet at 1630:16. There were no recorded statements regarding starting the APU.
The 10 000-foot scan/flow is initiated when descending through 10 000 feet. Action items are executed by the PNF as follows:Footnote 193
Logo Light ···································································································· ON
Gasper Fan ·································································································· ON
Air Cond & Pressurization ························································· SET FOR LANDING
If required, configure the pressurization system for Engine Bleeds OFF for landing.Footnote 194 Ensure that the APU has been operating for at least 60 seconds before completing this procedure.
Right Pack Switch ···································································································· ON
Left Pack Switch ······································································································ ON
Number 1 Engine Bleed Switch ·················································································· OFF
APU Bleed Switch ···································································································· ON
Number 2 Engine Bleed Switch ·················································································· OFF
Seat Belt Sign ························································································································ ON
Gravel Protect Switch (if installed) ······························································································ ON
Landing Lights ······································································································· AS REQUIRED
FAB6560 descended through 10 000 feet at 1632:35. At the commencement of the in-range check at 1632:48, the FO confirmed the seatbelt signs ON, gravel protect ON, and air conditioning pressurization set for landing. This confirmation indicates that the 10 000 foot scan/flow had been completed.
Available information does not clearly indicate whether the pilots started the APU. However, they turned on the gravel protect switch, indicating that they were aware of the gravel operating requirements. It is likely that they did start and use the APU.
Altitude alerter
The PNF will acknowledge all altitude assignments with ATC and repeat them aloud to the PF. All assigned altitudes down to the altitude at the final approach fix (FAF) will be preselected on the altitude alerter. On glideslope capture, the altitude alerter will be preset to the missed approach altitude. There was no requirement for pilots to acknowledge aural or visual altitude alerts.
Pilots interviewed were asked only about acknowledgment of aural altitude alerts below the selected altitude while on final approach. They indicated that such aural alerts were acknowledged by advising the other pilot that the altitude alerter was set to the missed approach altitude.
On FAB6560, the PNF did not repeat aloud the intended altitude when initially receiving the descent clearance from ATC at 1623:29. There were no altitude alerter tones recorded until the aircraft descended through 3200 feet at 1639:10, which was consistent with the altitude alerter being set to 2200 feet. A subsequent alert occurred at 1639:52, when the aircraft was descending through about 1950 feet asl.
Appendix W − NOTAMS
Initial NOTAMFootnote 195 to establish the Class D MTCA and Control Zone, issued 02 August 2011:
Issued 02 August 2011 at 1730Z:
PNS0506 02173032 GG CYZZOZEG 021730 CYHQYNYX
111404 NOTAMN CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE MTCA IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 80 NM RADIUS 744301N 945810W
700 FT AGL TO FL200. FOR OPS NANOOK.
FREQ FOR OPS NANOOK:
RESOLUTE TML: 228.5000 MHZ
: 123.075 MHZ
GLOWWORM (MIL PAR): 243.4000 MHZ
: 128.850 MHZ
RESOLUTE TWR: 236.5000 MHZ
: 123.325 MHZ
RESOLUTE GND: 249.9000 MHZ
: 128.975 MHZ
: 149.150 MHZ
1108061200 TIL 1108280100
Issued 02 August 2011 at 1735Z:
PNS0512 02173523 GG CYZZOZEG 021735 CYHQYNYX
111405 NOTAMN CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE CTL ZONE IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 10 NM RADIUS 744301N 945810W
SFC TO 6000 FT MSL. FOR OPS NANOOK
1108061200 TIL 1108280100
Revised NOTAM to establish the Class D MTCA and Control Zone, issued 04 August 2011:
Issued 04 August 2011 at 2000Z:
PNS0636 04200001 GG CYZZOZEG 041959 CYEGYFYX
111424 NOTAMR 111404 CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE MTCA IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 80 NM RADIUS 744301N 945810W
700 FT AGL TO FL200. FOR OPS NANOOK.
FREQ FOR OPS NANOOK:
RESOLUTE TML: 228.5000 MHZ
: 123.075 MHZ
GLOWWORM(MIL PAR): 243.4000 MHZ
: 128.850 MHZ
RESOLUTE TWR: 236.5000 MHZ
: 123.325 MHZ
RESOLUTE GND: 249.9000 MHZ
: 128.975 MHZ
: 149.150 MHZ
1108101300 TIL 1108280100
. . . .
Issued 04 August 2011 at 2006Z:
PNS0644 04200613 GG CYZZOZEG 042006 CYEGYFYX
111425 NOTAMR 111405 CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE CTL ZONE IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 10 NM RADIUS 744301N 945810W
SFC TO 6000 FT MSL. FOR OPS NANOOK
1108101300 TIL 1108280100
Revised NOTAM to establish the Class D Control Zone, issued 12 August 2011:
Issued 12 August 2011 at 2331Z:
PNS0810 12233157 GG CYZZOYRB 122331 CYHQYNYX
110102 NOTAMN CYRB RESULUTE BAY
CYRB DAH IS AMENDED AS FLW:
CLASS D RESOLUTE CTL ZONE IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 10 NM RADIUS 744301N 945810W
SFC TO 6000 FT MSL. FOR OPS NANOOK
1108101300 TIL 1108280100
Appendix X – List of acronyms and abbreviations
8ACCS
8 Air Control and Communications Squadron
ACC
area control centre
AD
airworthiness directive
ADF
automatic direction finding
ADF
automatic direction finding
ADI
attitude director indicator
agl
above ground level
ALT HOLD
altitude hold
AOM
aircraft operations manual
AP
autopilot (switch referred to as A/P)
APD
approach progress display
APU
auxiliary power unit
ARFF
aircraft rescue and firefighting
asl
above sea level
ASR
area surveillance radar
ATC
air traffic control
ATC MANOPS
air traffic control manual of operations
ATIS
automated terminal information system
ATV
all-terrain vehicle
AUTO APP
auto approach
AWWS
aviation weather Web site
BCRS
back course
°C
degrees centigrade
CAA
United Kingdom Civil Aviation Authority
CADORS
Civil Aviation Daily Occurrence Reporting System
CAR
Canadian Aviation Regulations
CARC
Civil Aviation Regulatory Committee
CARS
community aerodrome radio station
CASS
Commercial Air Service Standards
CB
Cambridge Bay
CDU
control display unit
CFIT
controlled flight into terrain
CVFR
controlled visual flight rules
COM
company operations manual
CRM
crew resource management
CRMI
CRM instructor
CRMIE
CRM instructor examiner
CVR
cockpit voice recorder
CWS
control wheel steering
CYRB
Resolute Bay Airport (International Civil Aviation Association [ICAO] location identifier)
CYUX
Hall Beach
CYZF
Yellowknife Airport
CZ
control zone
DG
directional gyro (free gyro)
DME
distance measuring equipment
DMI
deferred maintenance item
EATM
expeditionary air traffic management
EGPWS
enhanced ground proximity warning system
ELT
emergency locator transmitter
EPR
engine pressure ratio
ESTAP
name of a GPS navigational waypoint
ETA
estimated time of arrival
EUROCAE
European Organisation for Civil Aviation Equipment
FAA
United States Federal Aviation Administration
FAB6560
First Air flight 6560
FAF
final approach fix
FD
flight director
FDM
fight data monitoring
FDR
flight data recorder
FL
flight level
FMS
flight management system
FO
first officer
FOM
flight operations manual
FOQA
flight operational quality assurance
FOTM
flight operations training manual
fpm
feet per minute
GA
go-around
GNSS
global navigation satellite system
GPS
global positioning system
GPWS
ground proximity warning system
GS
glideslope (switches use G/S)
HDG HOLD
heading hold
HDG OFF
heading off
HDG SEL
heading select
HSI
horizontal situation indicator
ICAO
International Civil Aviation Organization
IFR
instrument flight rules
ILS
instrument landing system
IMC
instrument meteorological conditions
in. Hg
inches of mercury
IRB
3-letter identifier for the Resolute Bay instrument landing system (ILS) transmitter
JRCC
joint rescue coordination centre
KIAS
knots indicated airspeed
KTAS
knots true airspeed
LOC
localizer
LOSA
line operations safety audit
MAG
magnetic
MAN
manual
MCP
mode control panel
°M
degrees magnetic
METAR
routine aviation weather report
MF
mandatory frequency
MODE SEL
mode selection
MTCA
military terminal control area
MUSAT
name of a GPS navigational waypoint
nav-aid
navigational aid
NDA
Northern Domestic Airspace
NDB
non-directional beacon
nm
nautical miles
NOTAM
notice to airmen
NOTAMC
NOTAM cancellation
NOTAMN
new NOTAM
NOTAMR
replacement NOTAM
NTSB
United States National Transportation Safety Board
OFP
operational flight plan
OTNEL
name of a GPS navigational waypoint
PA
public address
PAR
precision approach radar
PACE
A crew communication strategy whereby pilots employ probing, alerting, challenging, and emergency warning messages to the other crew member.
PF
pilot flying
PIC
pilot-in-command
PITCH CMD
pitch command
PM
pilot monitoring
PNF
pilot not flying
RB NDB
Resolute Bay non-directional beacon
RIBUN
name of a GPS navigational waypoint
RMI
radio-magnetic indicator
RNAV
area navigation
sm
statute miles
SMS
safety management system
SOPs
standard operating procedures
SPECI
special weather report
°T
degrees true
TAF
aerodrome forecast
TAWS
terrain awareness and warning system
TC
Transport Canada
TCA
terminal control area
TEM
threat and error management
TOD
top of descent
TSB
Transportation Safety Board
UTC
universal coordinated time
VAPP
approach speed (VREF) corrected for wind
VFR
visual flight rules
VHF
very high frequency
VMC
visual meteorological conditions
VOR
VHF omnidirectional range
VREF
approach reference speed
YRB
Resolute Bay Airport (International Air Transport Association [IATA] location identifier)


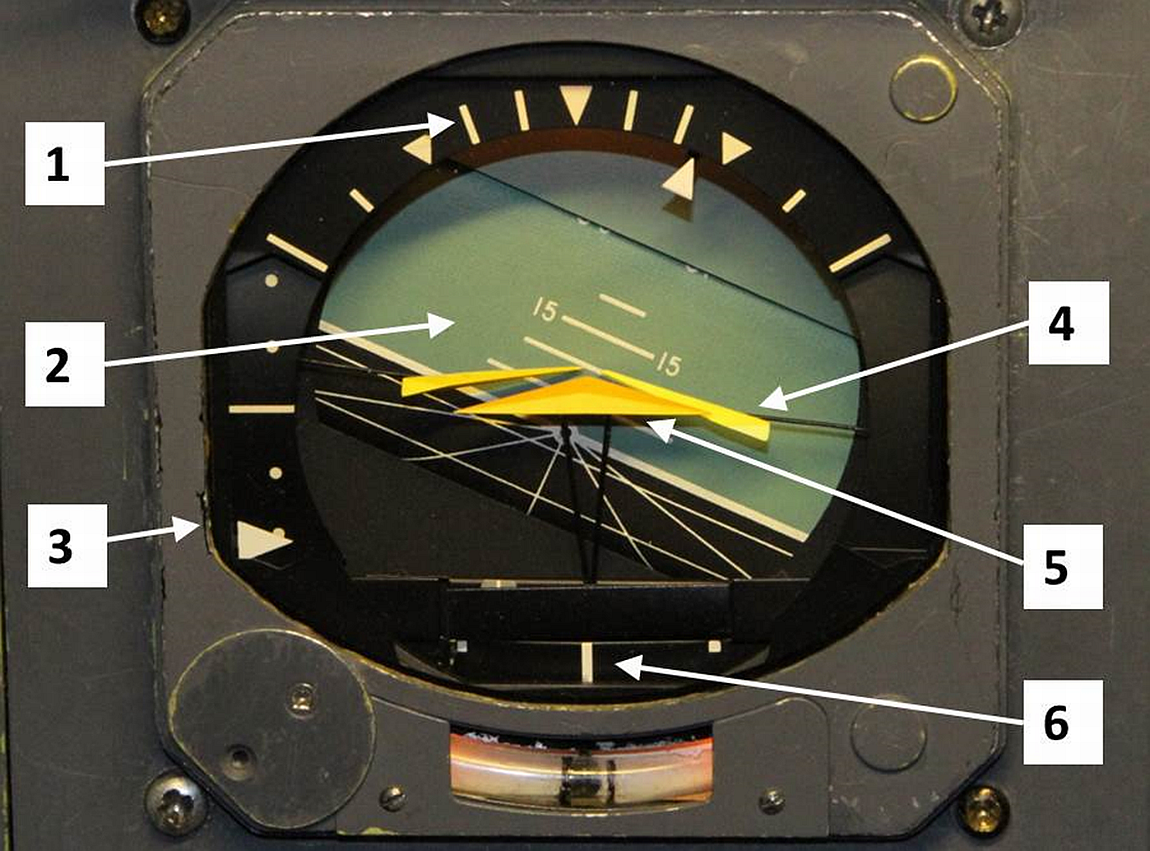

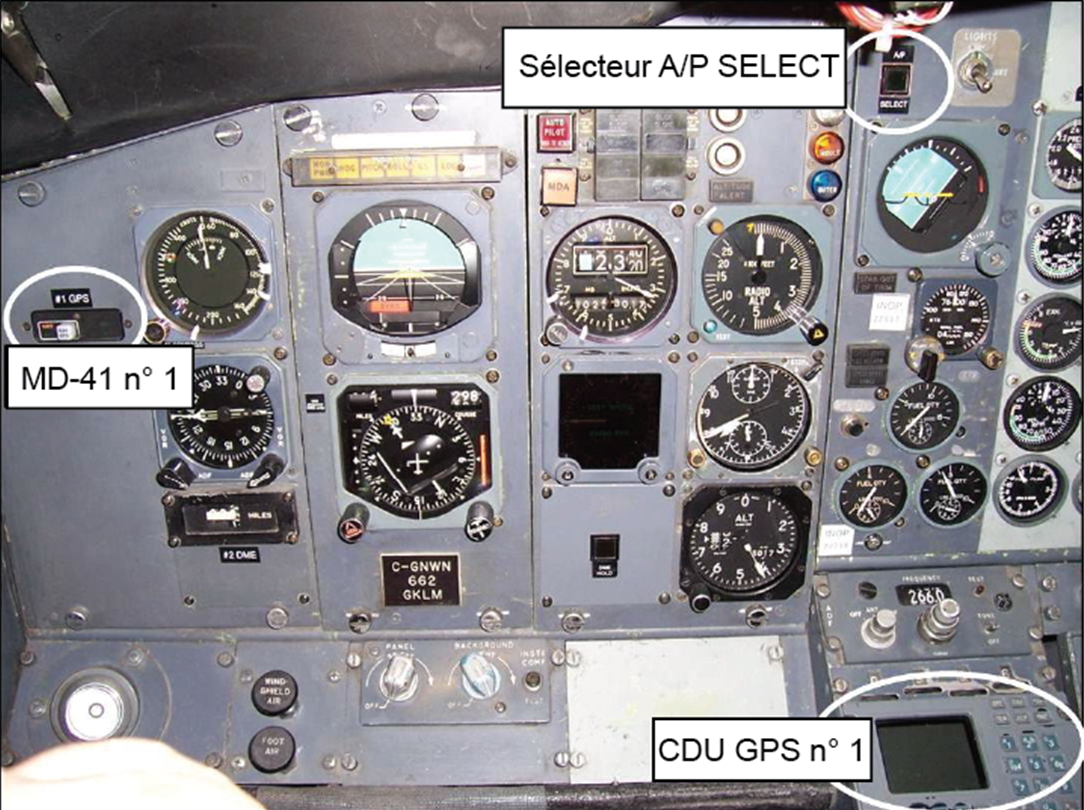
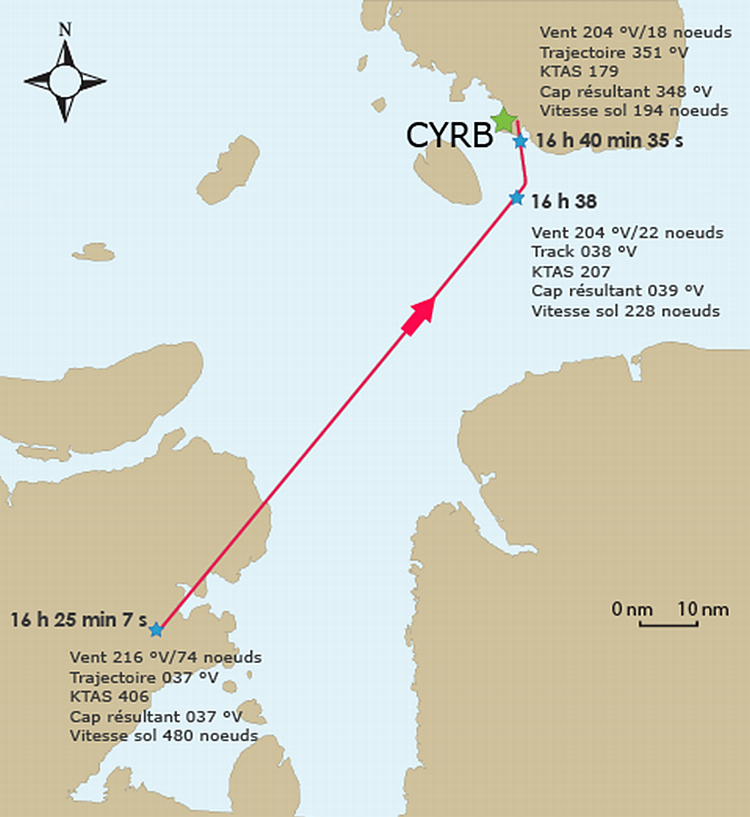
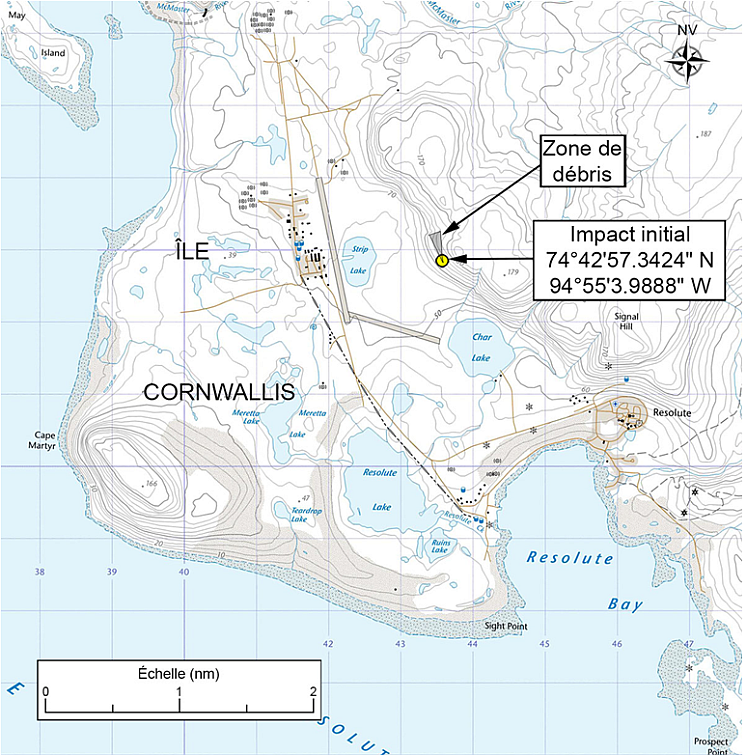
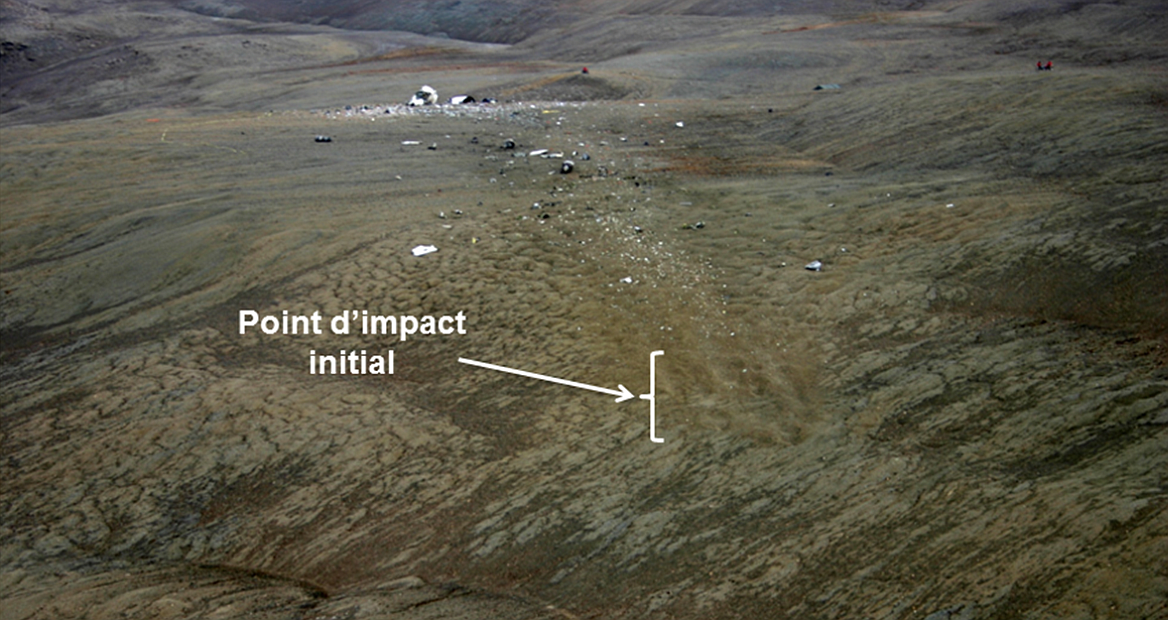
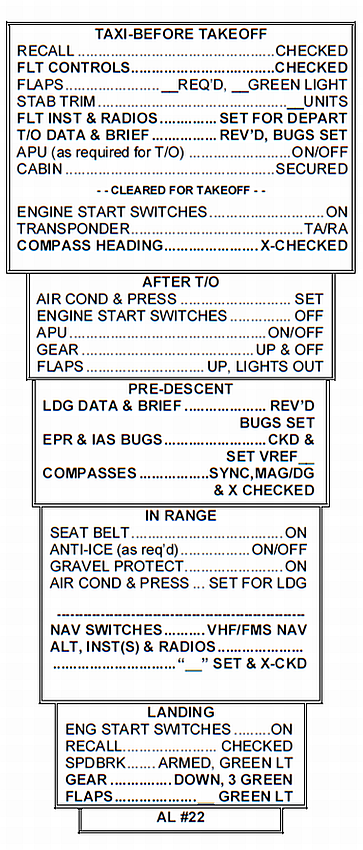
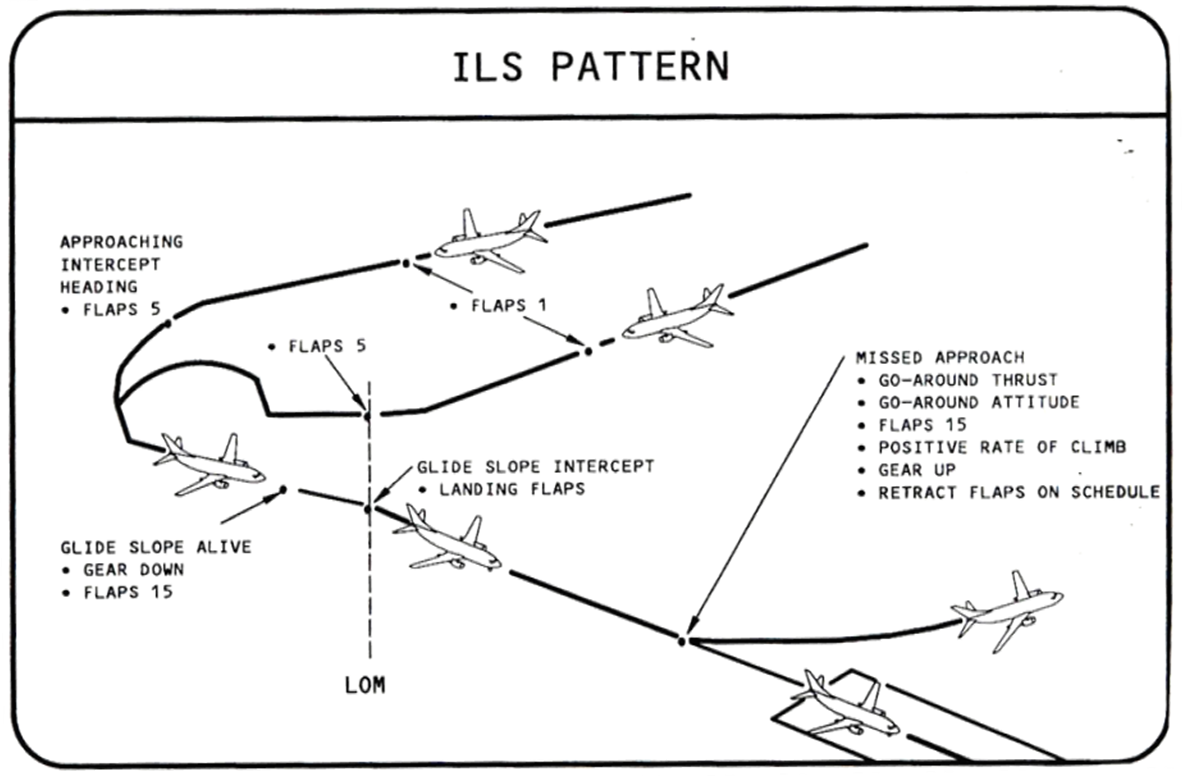
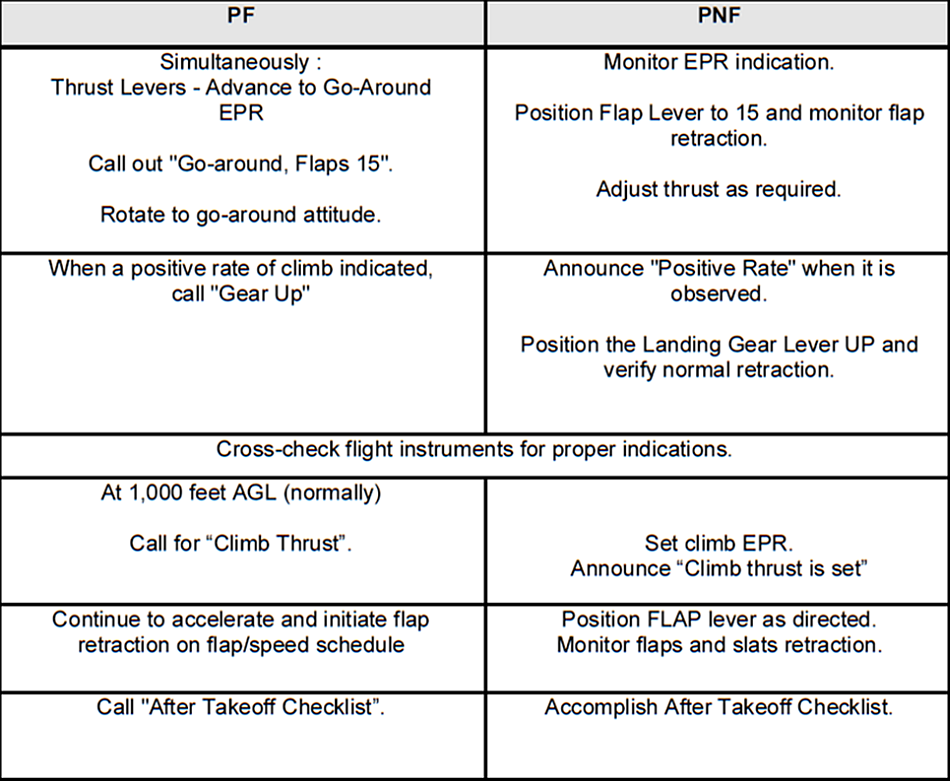
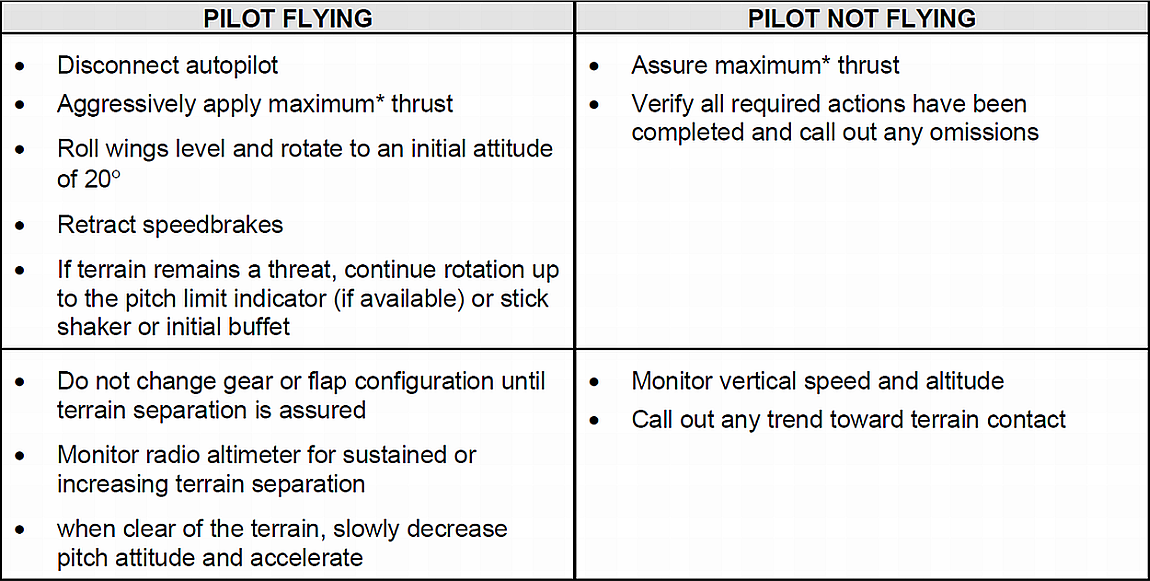
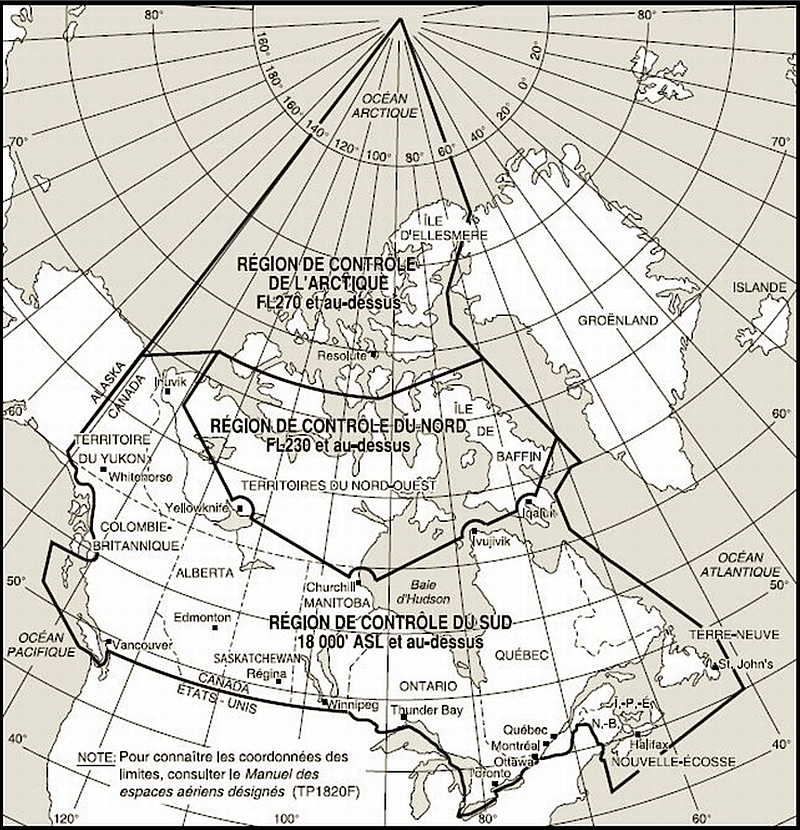
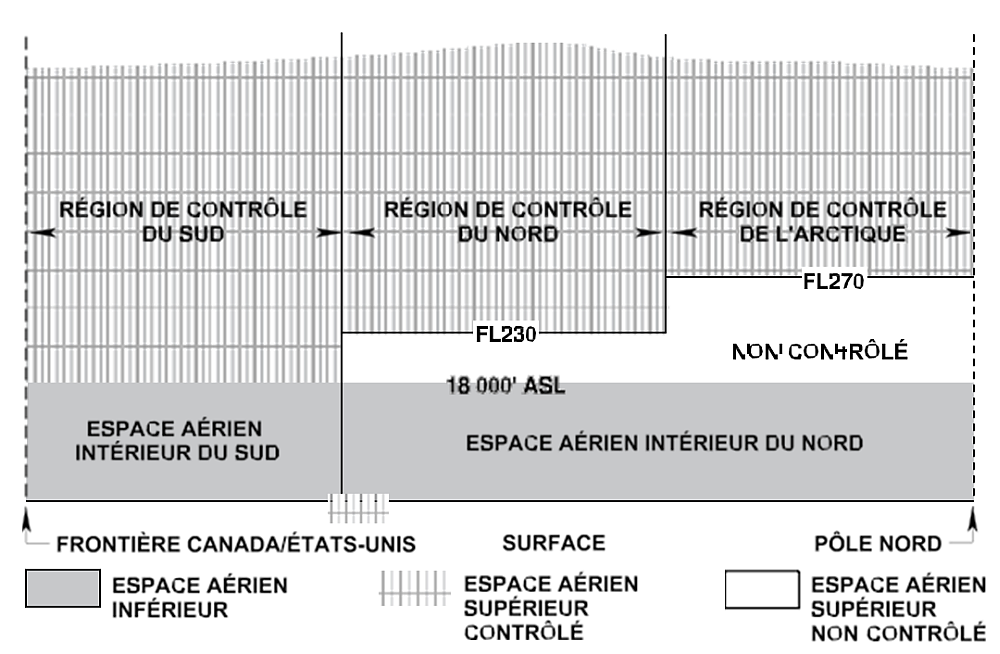
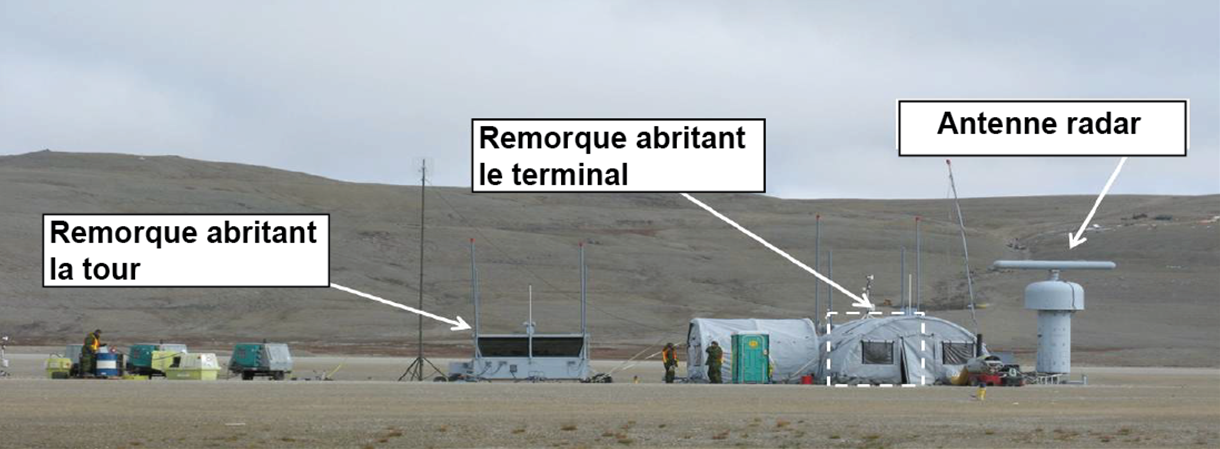
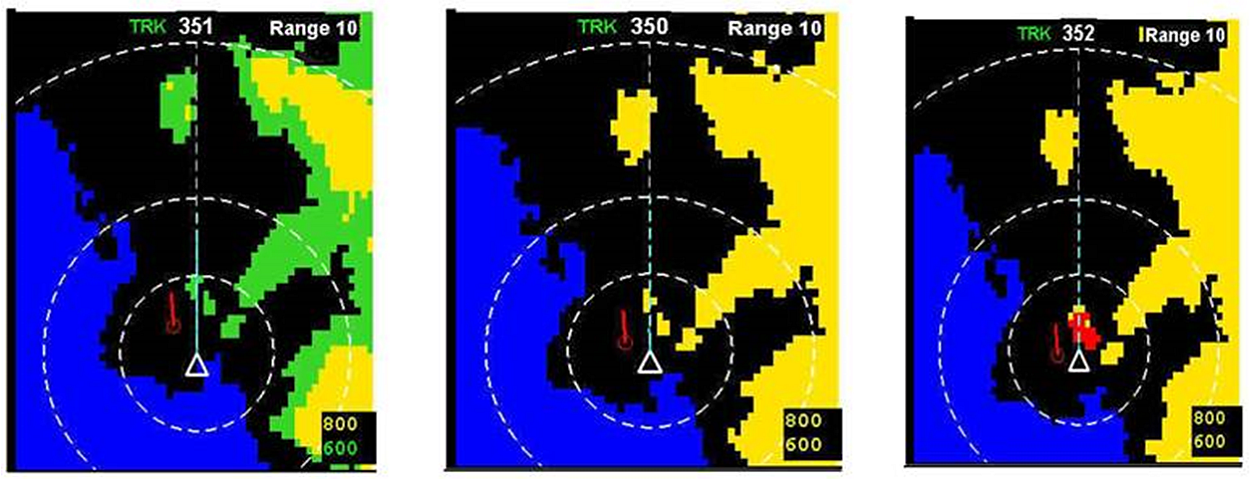


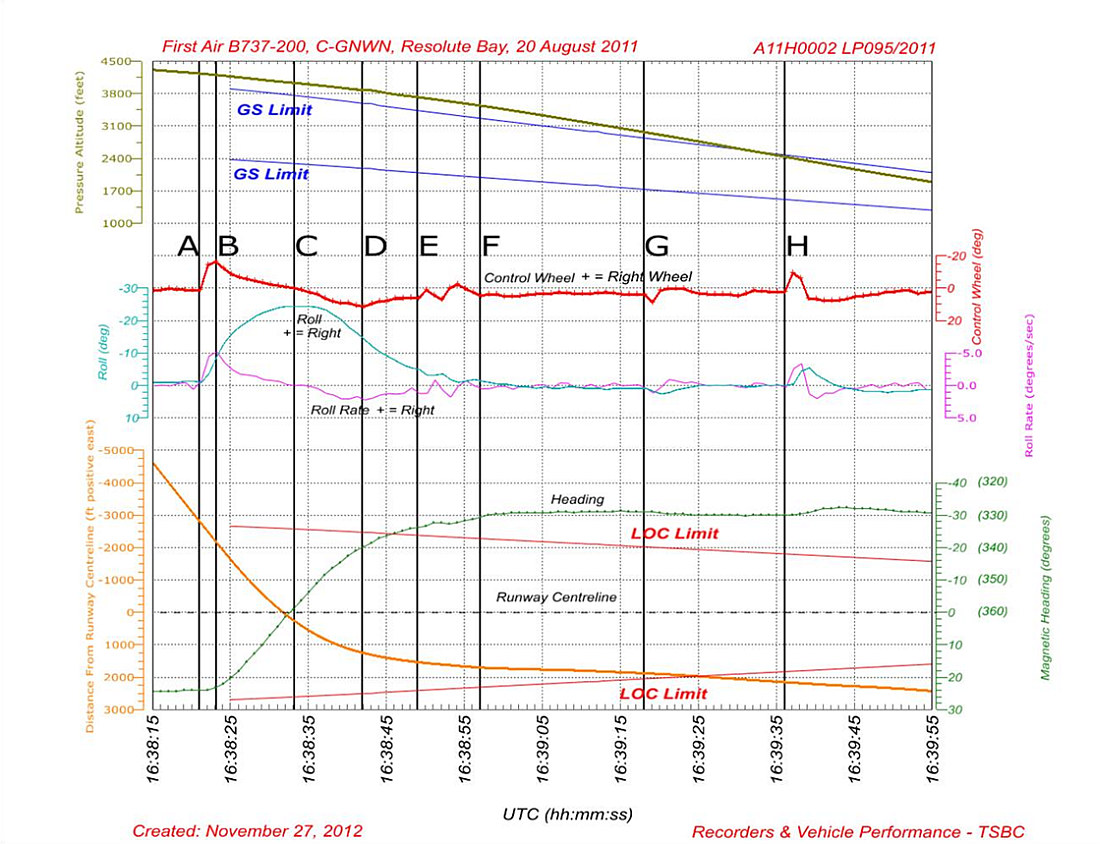
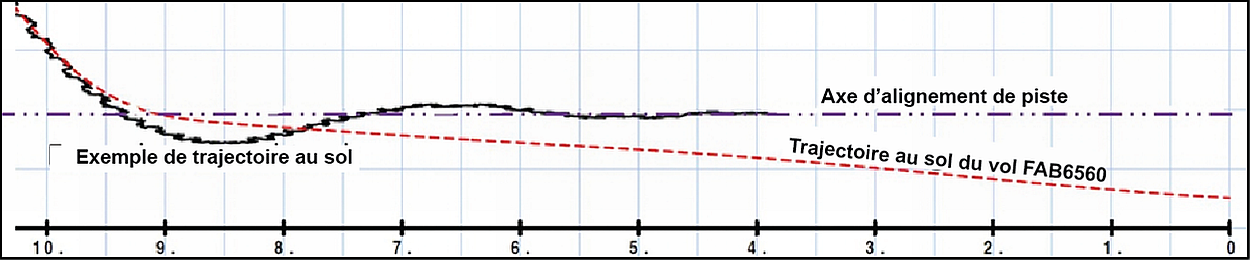


![Figure 18. Tracé de l'approche finale selon les données consignées dans le FDR [en anglais seulement]](/sites/default/files/fra/rapports-reports/aviation/2011/a11h0002/images/a11h0002-figure-18.png)

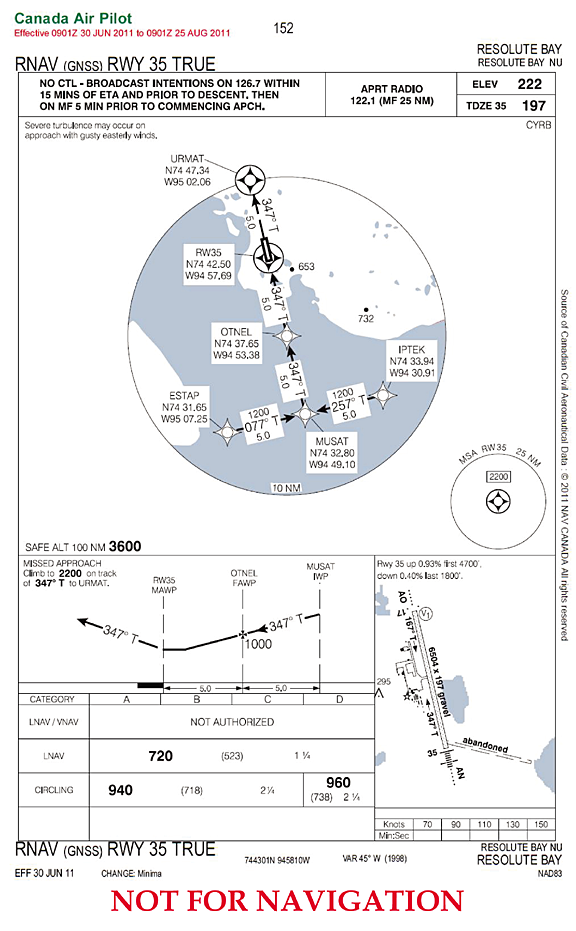
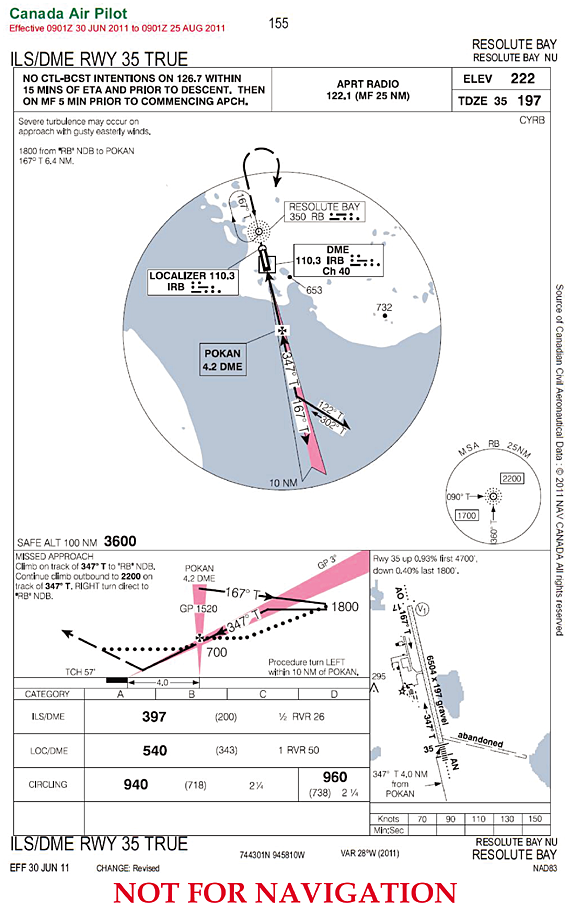
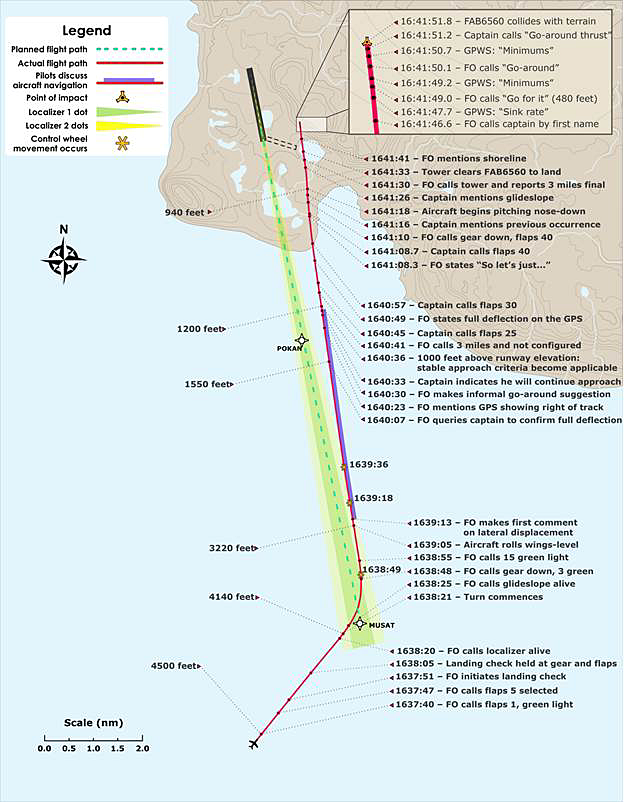
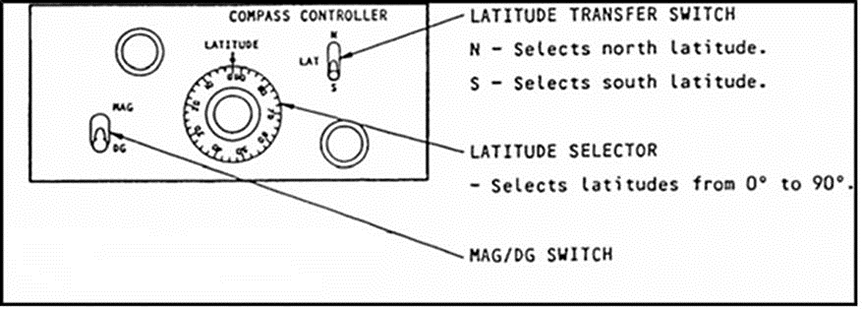
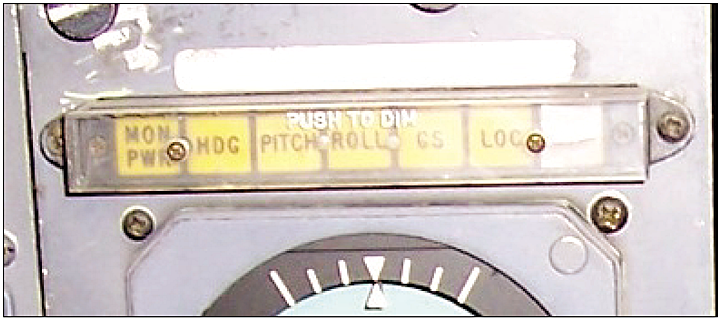



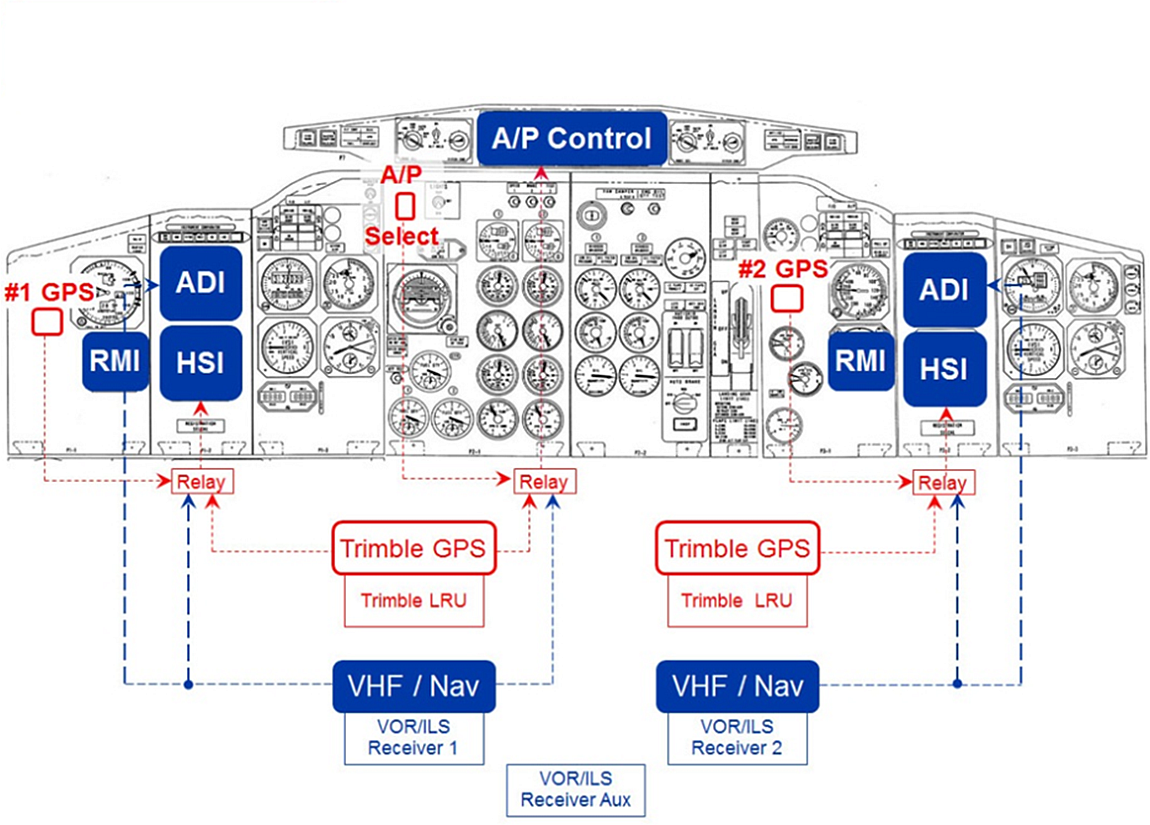

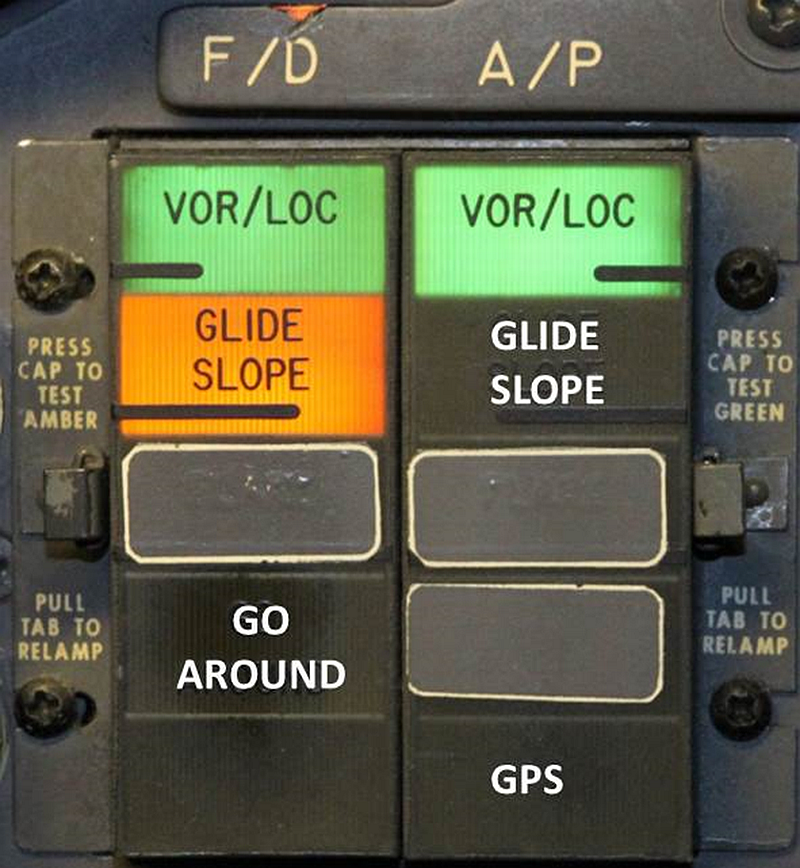
![Chronologie des événements : 16 h 23 à 16 h 33 [en anglais seulement]](/sites/default/files/fra/rapports-reports/aviation/2011/a11h0002/images/a11h0002-appendix-i.png)
![Chronologie des événements : 16 h 36 à 16 h 38 [en anglais seulement]](/sites/default/files/fra/rapports-reports/aviation/2011/a11h0002/images/a11h0002-appendix-j.png)
![Chronologie des événements : 16 h 38 à 16 h 40 [en anglais seulement]](/sites/default/files/fra/rapports-reports/aviation/2011/a11h0002/images/a11h0002-appendix-k.png)
![Chronologie des événements : 16 h 40 à 16 h 41 [en anglais seulement]](/sites/default/files/fra/rapports-reports/aviation/2011/a11h0002/images/a11h0002-appendix-l.png)
![16 h 41 à 16 h 41 min 45 s [en anglais seulement]](/sites/default/files/fra/rapports-reports/aviation/2011/a11h0002/images/a11h0002-appendix-m.png)
![Chronologie des événements : 16 h 41 min 45 s à 16 h 41 min 52 s [en anglais seulement]](/sites/default/files/fra/rapports-reports/aviation/2011/a11h0002/images/a11h0002-appendix-n.png)