Perte de puissance moteur et collision avec le relief
de l'hélicoptère Bell 206B Jet Ranger C-GCHE
exploité par Bighorn Helicopters Inc.
à Cranbrook (Colombie-Britannique)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
À 12 h 9, heure avancée des Rocheuses, l'hélicoptère Bell 206B Jet Ranger (immatriculé C-GCHE et portant le numéro de série 1249) exploité par Bighorn Helicopters Inc. décolle de l'héliport de l'entreprise aux abords de Cranbrook (Colombie-Britannique), avec à son bord le pilote et deux passagers. L'hélicoptère effectue une inspection visuelle à basse altitude des lignes de transport d'électricité à haute tension qui traversent les banlieues de Cranbrook. Vers 13 h 6, comme l'hélicoptère vole en direction sud à environ 120 pieds au-dessus du sol, une perte de puissance moteur se produit subitement, ce qui entraîne une perte rapide du régime rotor. L'hélicoptère descend rapidement et atterrit brutalement sur une rue asphaltée située sous sa trajectoire de vol. L'hélicoptère heurte un piéton qui se trouve sur le trottoir adjacent au point d'impact ainsi qu'un véhicule automobile circulant en direction ouest sur la rue.
L'hélicoptère se fragmente en plusieurs morceaux, et prend feu. Les trois occupants de l'hélicoptère et le piéton subissent des blessures mortelles à l'impact. Le véhicule automobile est endommagé, mais son occupant n'est pas blessé. L'hélicoptère est complètement détruit par un violent incendie alimenté par du carburant qui éclate après l'écrasement. La radiobalise de repérage d'urgence brûle complètement dans l'incendie, et on ne sait pas si un signal a été émis. L'accident se produit dans les limites de la ville de Cranbrook, par 49°29′56″ N, 115°45′40″ W, à une altitude d'environ 3100 pieds au-dessus du niveau moyen de la mer.
Renseignements de base
Déroulement du vol
Le profil de vol avait été établi par BC Hydro, et avait été d'abord planifié par le pilote et ses deux passagers, c'est-à-dire deux techniciens en lignes de transport d'électricité travaillant pour BC Hydro. La mission consistait à examiner visuellement les lignes de transport d'électricité de 60 kVA (kilovolts-ampères) qui se trouvaient au nord de la zone Moyie/McGillivray et qui traversaient la ville de Cranbrook, vers l'est de la ville puis vers le nord-ouest (voir l'annexe A – Route prévue pour l'inspection des lignes de transport d'électricité).
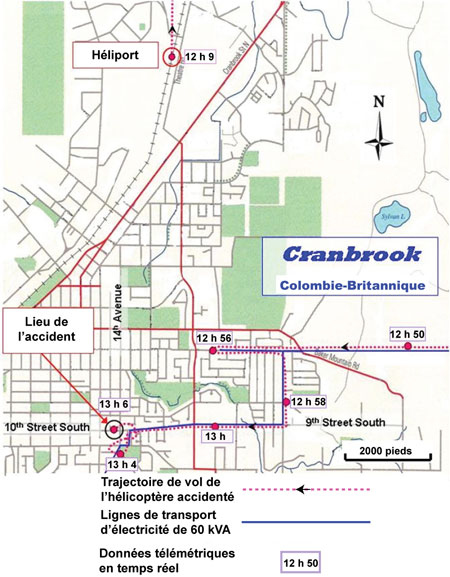
La tâche des techniciens consistait à repérer et à consigner toute anomalie relativement aux lignes ou aux poteaux, pour qu'une équipe au sol puisse ultérieurement faire une inspection et une réparation. Pour exécuter cette tâche efficacement, il fallait que l'inspection se fasse à environ 20 ou 30 pieds au-dessus des lignes de transport d'électricité ou des poteaux, à une vitesse sol d'environ 25 nœuds. Les données télémétriques en temps réel reçues de l'hélicoptère pendant le vol en question confirment que la partie du vol qui s'est déroulée au-dessus de la ville était conforme à ce profil. L'hélicoptère n'envoie pas continuellement ces données; un paquet de données est envoyé toutes les deux minutes, ce qui laisse des vides pour suivre la trajectoire de vol. Toutefois, on a pu recréer la trajectoire de vol car suffisamment de paquets de données ont été enregistrés.

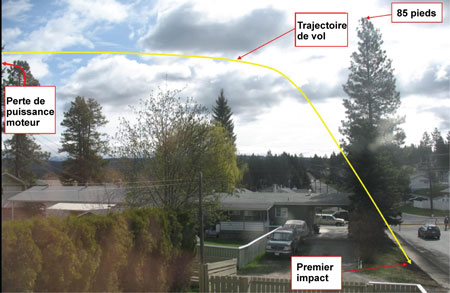
L'hélicoptère a décollé à 12 h 9Footnote 1 de l'héliport de l'entreprise Bighorn Helicopters Inc., au nord de la ville, et il a volé le long des lignes de transport d'électricité vers le nord-ouest de la ville. Il a refait le même trajet pour suivre les lignes vers l'est, puis s'est dirigé vers le sud. À 12 h 47, l'hélicoptère a viré vers l'ouest pour suivre les lignes vers un quartier résidentiel de la ville. À 12 h 58, l'hélicoptère se dirigeait vers le sud, en survolant la 30e avenue sudFootnote 2. Il a viré vers la droite pour suivre les lignes en direction ouest, au-dessus de la 9e rue sud. Quatre minutes plus tard, à proximité de la 10e rue et de la 14e avenue, l'hélicoptère a effectué plusieurs manœuvres à basse altitude (voir la photo 1 et l'annexe B – Carte de la ville de Cranbrook), et il semblait qu'on procédait à la vérification des lignes de transport d'électricité de la zone en question. Il volait en direction sud-sud-ouest au-dessus de la 14e avenue (à mi-chemin entre les 7e et 10e rues) à environ 120 pieds au-dessus du sol (agl) et à 25 nœuds lorsqu'il a perdu toute puissance moteur (voir la photo 2). L'hélicoptère a effectué une descente rapide; pendant les quelques dernières secondes de vol, l'appareil était ingouvernable et est tombé en chute libre d'une hauteur d'environ 85 pieds au-dessus du sol.
Conditions météorologiques
Au moment de l'accident, les conditions météorologiques du secteur convenaient au vol à vue. Le ciel était couvert, le vent soufflait généralement du sud-ouest à environ 10 nœuds et on n'a signalé aucune turbulence. La température n'a pas été enregistrée officiellement sur le lieu de l'accident, mais l'observation météorologique horaire de 13 h de l'aéroport de Cranbrook indiquait une température de 12 °C. Il est fort probable que la température de la région urbaine était un peu plus chaude. Les conditions météorologiques n'ont aucunement contribué à l'accident.
Renseignements sur le pilote
Le pilote possédait les licences et les qualifications nécessaires au vol, conformément à la réglementation en vigueur. Il possédait une licence canadienne valide (pilote professionnel – hélicoptère), et totalisait environ 5100 heures de vol, dont 1600 sur des hélicoptères Bell 206. Il avait commencé à travailler comme pilote de ligne pour l'entreprise Bighorn Helicopters Inc. en juillet 2007, et avait satisfait à toutes les exigences de l'entreprise en matière de formation périodique au sol et en vol. Le pilote était bien reposé avant sa prise de service. L'activité de BC Hydro à Cranbrook avait débuté le jour de l'accident, et le pilote avait effectué environ 2,5 heures de vol pour BC Hydro. Le pilote était reconnu par les clients et ses pairs comme étant compétent et prudent.
Renseignements sur l'hélicoptère
L'hélicoptère accidenté était un hélicoptère Bell 206B Jet Ranger, et avait été construit en 1974 par Bell Helicopter Company au Texas (États-Unis). Depuis cette date, l'hélicoptère totalisait environ 16 500 heures de service. Les registres et les dossiers de maintenance ont indiqué que l'hélicoptère avait été certifié, équipé et entretenu conformément à la réglementation canadienne en vigueur et aux procédures approuvées.
Renseignements sur le lieu de l'écrasement et l'épave
Sur le lieu de l'accident, les dernières secondes de vol se sont déroulées essentiellement face au vent dominant. L'hélicoptère a heurté le sol de la 10e rue sud qui était en pente douce, à environ 300 pieds à l'ouest de la 14e avenue sud. C'était surtout une zone à découvert, mais on y retrouvait plusieurs obstacles que le pilote a pu tenter d'éviter pendant sa descente. À l'est du lieu de l'écrasement se trouvaient deux grands conifères dont le plus haut s'élevait à environ 85 pieds. En outre, on y trouvait une série de lignes électriques résidentielles, orientée du nord au sud, ainsi qu'une résidence sous ces lignes (voir la photo 2). Compte tenu des positions et des déplacements relatifs de la voiture, de l'hélicoptère, du piéton et des arbres, il est fort peu probable que le pilote ait vu le piéton ou la voiture avant l'impact.
Durant les deux dernières secondes de vol, l'hélicoptère est descendu vers la rue presque à la verticale dans une assiette en cabré inclinée vers la gauche. Le sabot de queue et le rotor de queue ont d'abord heurté le sol, ce qui a arraché la partie de la boîte de transmission du rotor de queue. Le fuselage principal a ensuite heurté la rue avec une telle violence que les patins d'atterrissage se sont brisés; la cabine, le plateau du moteur et de la boîte de transmission ainsi que la structure de la cellule se sont affaissés, ce qui a fait éclater le réservoir de carburant. L'hélicoptère a glissé vers l'avant sur environ 20 pieds et effectué une rotation d'environ 200°, puis s'est immobilisé en sens contraire de sa trajectoire de vol. Les deux pales du rotor étaient intactes, et les dommages causés par la collision avec le sol se limitaient à une section extérieure de trois pieds. Un incendie a éclaté quelques secondes après l'écrasement, et s'est transformé, en à peine une minute, en un intense brasier alimenté par l'important flot de carburant qui coulait vers le caniveau. Le service des incendies de Cranbrook est arrivé sur les lieux dans les quatre minutes qui ont suivi l'écrasement, et il a éteint l'incendie. Environ 60 % de l'hélicoptère a brûlé, mais le moteur, la boîte de transmission et la tête du rotor ont été épargnés. Certains composants ont été projetés loin de l'épave et n'ont pas été touchés par l'incendie.
Les restes de la cellule ont été examinés dans la mesure du possible, mais il a été impossible de déterminer la continuité des commandes en raison de l'ampleur de la destruction de nature mécanique et thermique. En ce qui concerne les quelques composants qui ont été épargnés, rien n'indiquait qu'une anomalie ou une défaillance des commandes, de la chaîne dynamique ou de tout autre système de l'hélicoptère avait précédé l'accident et aurait pu y contribuer.
Examen du moteur
Le moteur de modèle 250-C20 posé dans l'hélicoptère accidenté portait le numéro de série CAE-821311 et avait été fabriqué par Detroit Diesel Allison, une division de General Motors Corporation. La société Rolls-Royce est actuellement titulaire du certificat de type délivré par la Federal Aviation Administration (FAA) pour ce modèle de moteurFootnote 3. Le moteur est de conception modulaire, comprend un compresseur, une turbine ainsi qu'un boîtier d'entraînement des accessoires, et a une puissance nominale sur l'arbre de 400 shp (shaft horsephower).
Le moteur a été retiré de l'hélicoptère accidenté puis démonté dans un atelier de révision moteur agréé sous la supervision directe du BST. Pendant l'examen, le régulateur de carburant et le régulateur de turbine de travail ont été démontés et soumis à un examen et à une analyse plus poussés.
Le régulateur de carburant et le régulateur de turbine de travail avaient été intégrés au moteur en juin 2006, alors que les composants étaient neufs. Au moment de l'accident, ils totalisaient environ 1130 heures de service continu; ce chiffre est bien inférieur à l'intervalle de révision de 2500 et de 2000 heures qui s'applique respectivement au régulateur de carburant et au régulateur de turbine de travail.
L'extérieur du boîtier d'entraînement des accessoires moteur a été endommagé par la chaleur, mais, à part ces dommages, le composant était intact, et a pu être examiné minutieusement. En résumé, les examens du compresseur, de la turbine et du boîtier d'entraînement des accessoires ont révélé que le moteur tournait à une vitesse relativement faible lorsque l'appareil a heurté le sol, et que le régime était considérablement plus bas que le régime permettant au moteur de continuer à tourner. Le régime en question correspond à une décélération normale du moteur. Les composants mécaniques n'ont pas permis de conclure qu'un problème mécanique était à l'origine du bas régime, et on n'a relevé aucun dommage ni aucune anomalie ayant précédé l'écrasement.
Régulateur de carburant de la turbine à gaz
Le régulateur de carburant Honeywell (modèle DP-N2) est le composant de base du régulateur de carburant des turbines à gaz de la série 250-C20 de Rolls-Royce. Il s'agit d'un dispositif pneumatique-mécanique qui règle le débit du carburant vers le moteur et assure son bon fonctionnement selon les spécifications de performances opérationnelles. Le régulateur de carburant est monté sur le boîtier d'entraînement des accessoires, et le régime assurant son entraînement est proportionnel au régime du générateur de gaz de la turbine (N1). Des six paramètres nécessaires au régulateur de carburant pour bien régler le débit de carburant, deux sont associés au régulateur de turbine de travail.
Le régulateur de carburant accidenté a été démonté et examiné avec soin. Il a été exposé à des températures extrêmement élevées pendant l'incendie qui a suivi l'écrasement, et a été considérablement endommagé par la chaleur. Les analyses du BST n'ont révélé aucune défaillance mécanique qui aurait pu avoir des répercussions sur le fonctionnement du régulateur de carburant (voir le rapport de laboratoire LP 098/2008 du BST pour de plus amples renseignements). Par contre, l'hypothèse d'un mauvais fonctionnement latent du régulateur de carburant n'a pu être écartée.
Régulateur de turbine de travail
Le régulateur de turbine de travail Honeywell (modèle AL-AA2) sert de complément au régulateur de carburant Honeywell DP-N2, et est un élément essentiel du système de gestion de carburant des moteurs de la série 250-C20 de Rolls-Royce. La fonction du régulateur est de maintenir le régime de la turbine de puissance (N2) en rajustant le régulateur de carburant principal pendant le fonctionnement du moteur. Cette fonction de réglage établit le régime du générateur de gaz de la turbine (N1) qui est nécessaire à l'alimentation de N2. Un mauvais fonctionnement en vol du régulateur de turbine de travail aurait très certainement une incidence sur le bon fonctionnement du régulateur de carburant et, selon le type de défaillance du régulateur de turbine de travail, pourrait causer une perte de puissance du moteur.
Le régulateur de turbine de travail a été démonté et examiné avec soin. Tout comme l'autre composant, il a également été exposé à des températures extrêmement élevées pendant l'incendie qui a suivi l'écrasement, et a subi des dommages mécaniques et thermiques. La seule anomalie consistait en une cale d'espacement lâche dans le composant.
À l'origine, le régulateur de turbine de travail Honeywell comprenait des cales d'espacement sur les deux tiges. Par la suite, Honeywell a déterminé que les cales d'espacement étaient inutiles sur l'une des tiges, et ces cales ont été supprimées de la conception. Le catalogue illustré des pièces et les instructions de maintenance et d'entretien ont été modifiés. Toutefois, après la mise en œuvre de la modification de conception, Honeywell a accidentellement assemblé plusieurs dispositifs avec des cales d'espacement sur les deux tiges. Les recherches du BST ont révélé que des cales d'espacement avaient été trouvées à cet endroit dans d'autres régulateurs de turbine de travail remis à neuf, et que l'entreprise Honeywell était au courant de ce fait. Le régulateur de turbine de travail accidenté avait été fabriqué après la modification de conception.
Le Laboratoire du BST à Ottawa a minutieusement examiné le dispositif (voir le rapport de laboratoire LP 098/2008 du BST pour de plus amples renseignements). Un examen au microscope électronique à balayage de la cale d'espacement lâche a révélé qu'elle était installée sur le galet de came à tige entre le mur de la cavité et l'extrémité de l'ensemble levier. Il s'agissait de la tige qui n'avait plus besoin d'être calée. L'autre tige était toujours en place avec les cales connexes.
Par conséquent, on peut conclure que la cale d'espacement lâche avait été installée délibérément lors de la fabrication et s'est séparée de la tige lors du démontage après l'accident. Rien n'a démontré que la cale d'espacement telle qu'installée pouvait constituer une entrave. Elle avait été bien assemblée, selon les anciennes instructions d'assemblage. Aucun lien n'a pu être établi avec une anomalie fonctionnelle du régulateur de turbine de travail.
Comme des défaillances du modèle de régulateur de turbine de travail en question avaient été récemment signalées, le BST a examiné le dispositif accidenté pour déterminer s'il présentait les caractéristiques de ces défaillances antérieures et si ces dernières avaient eu une incidence sur le fonctionnement du régulateur de turbine de travail dans l'accident en question. Les pièces vulnérables ne présentaient aucun dommage suspect, ce qui a permis d'établir la conclusion préliminaire que les zones fragiles problématiques n'ont pas été à l'origine d'un mauvais fonctionnement du régulateur de turbine de travail. Toutefois, l'hypothèse d'une anomalie latente du régulateur de turbine de travail n'a pu être écartée.
Enquête antérieure du BST
Au cours d'une enquête sur un accident causé par la perte de puissance des deux moteurs, survenu en février 2005 (rapport d'enquête A05P0038 du BST), le BST a découvert que les mêmes régulateurs de turbine de travail avaient apparemment posé un problème. En avril 2005, le BST a envoyé un Avis de sécurité aérienne (A050009-1) à Transports Canada, dans lequel le BST révélait en partie que les dossiers d'un important atelier de révision et de réparation au Canada indiquaient que les régulateurs de turbine de travail des moteurs de la série 250-C20 de Rolls-Royce avaient une durée de vie utile moyenne de 1150 heuresFootnote 4 après réparation ou révision, avant qu'une réparation ne soit nécessaire. Le régulateur de turbine de travail de C-GCHE totalisait 1130 heures depuis sa mise en service initiale.
Les régulateurs de turbine de travail semblables montés dans les moteurs PT6T3 de Pratt & Whitney (PWC) avaient une durée de vie utile moyenne de 1600 heures avant qu'ils ne nécessitent une réparation. Il est opportun de signaler que l'intervalle de révision du régulateur de turbine de travail est de 2000 heures lorsque le dispositif est monté dans un moteur Rolls-Royce, et de 4500 heures, dans un moteur PWC. L'Avis de sécurité aérienne du BST avait pour but de suggérer à Transports Canada d'examiner les intervalles de révision des régulateurs de turbine de travail. En juillet 2005, Transports Canada a répondu que son examen de la base de données des rapports de difficultés en service n'indiquait pas que l'intervalle de révision posait un problème récurrent, et il a proposé de ne prendre aucune autre mesure.
Masse et centrage de l'hélicoptère
Peu avant le décollage de l'hélicoptère accidenté, il semblerait que le pilote a ajouté du carburant pour que la jauge de carburant dans le poste de pilotage indique 75 gallons américains, ce qui était plus qu'acceptable pour le vol prévu. L'hélicoptère a volé pendant 57 minutes avant l'accident et, par conséquent, il devait rester environ 50 gallons américains ou 350 livres de carburant. Il était évident qu'il y avait une importante quantité de carburant à bord de l'hélicoptère au moment de l'impact, compte tenu de la coulée de carburant enflammé sur le lieu de l'accident.
Les enquêteurs du BST ont calculé que la masse brute de l'hélicoptère au moment de l'accident était d'environ 2850 livres. Si l'on se fie au manuel de vol du giravion du Bell 206B, la masse brute maximale au décollage est de 3200 livres (charge interne). Ces calculs indiquaient également que le centre de gravité longitudinal et le centre de gravité latéral respectaient les limites prescrites. La masse comme le centre de gravité respectaient les limites prescrites.
Performances en vol stationnaire
Le lieu de l'écrasement se trouvait à environ 3100 pieds au-dessus du niveau de la mer (asl) et, si la température ambiante était de 12 °C, l'altitude-densité aurait été d'environ 3400 pieds asl. Selon le manuel de vol du giravion du Bell 206B, le tableau du plafond en vol stationnaire hors effet de sol garantit que l'hélicoptère peut voler en stationnaire sans profiter des performances que procure l'effet de sol, selon une masse brute maximale autorisée pour différentes conditions d'altitude-pression et de température extérieure ambiante. Compte tenu des conditions du milieu au moment de l'accident, le tableau du plafond en vol stationnaire hors effet de sol indiquait que la masse de l'hélicoptère ayant à son bord les trois occupants se trouvait nettement dans la limite où l'hélicoptère aurait été capable de voler en stationnaire hors effet de sol (voir l'annexe C – Plafond en vol stationnaire hors effet de sol).
Autorotation de l'hélicoptère
L'autorotation d'un hélicoptère est un processus aérodynamique complexe. En voici une description simplifiée pour aider les lecteurs à mieux le comprendre.
L'autorotation permet à l'hélicoptère de descendre sans perte de maîtrise lors d'une panne moteur ou de toute autre défaillance mécanique catastrophique, et cette manœuvre permet encore au pilote d'effectuer un atterrissage en toute sécurité. Tous les hélicoptères peuvent se mettre en autorotation, même s'ils sont équipés de plusieurs moteurs. Tout comme dans le cas d'un avion à voilure fixe qui atterrit en plané, il n'est pas possible de remettre les gaz après une autorotation dont la cause est une urgence réelle; on ne peut pas compter sur une seconde chance.
Un aspect critique de l'autorotation est la manœuvre d'entrée que le pilote doit faire dès la perte de puissance moteur, car il doit réagir rapidement pour maintenir le régime rotor. De tous les autres facteurs ayant une incidence sur le vol en autorotation, l'altitude au moment de la perte de puissance moteur définit immédiatement plusieurs éléments importants qui détermineront la réussite d'une descente et d'un atterrissage. Plus l'hélicoptère est haut au-dessus de la surface d'atterrissage, plus le pilote aura le temps de trouver un endroit qui conviendra à l'atterrissage ainsi que de prendre et de maintenir la maîtrise de l'appareil. En outre, il disposera d'une plus grande distance de descente. Un vol à basse altitude réduit toutes ces marges de manœuvre à un point tel qu'il pourrait être impossible de voler en autorotation et de poser l'hélicoptère.
L'atterrissage sans moteur après une descente en autorotation est une manœuvre difficile pour n'importe quel pilote d'hélicoptère car ce dernier doit faire appel à des compétences qu'il n'a pas souvent l'occasion de mettre en pratique, dans un régime de vol qui ne pardonne pas. Dans l'accident en question, le pilote devait éviter plusieurs obstacles, comme les lignes électriques résidentielles, de grands arbres, plusieurs maisons et la circulation routière. Tous ces facteurs réduisaient grandement la marge de manœuvre du pilote ainsi que les choix qui s'offraient à lui pour l'atterrissage. En outre, il était confronté à un dilemme : allonger son plané pour éviter les maisons au détriment de la maîtrise en vol. Compte tenu des circonstances, le pilote n'a pas disposé d'une altitude suffisante pour maintenir un régime rotor fonctionnel après la perte de puissance moteur, et n'a pas pu gouverner l'appareil pendant les dernières secondes de vol; l'hélicoptère est tombé en chute libre d'une hauteur d'environ 85 pieds au-dessus de la route.
Diagramme hauteur/vitesse
Le diagramme hauteur/vitesse est propre aux hélicoptères. Pour les hélicoptères monomoteurs, le diagramme hauteur/vitesse indique à l'aide d'un graphique les combinaisons de vitesse et de hauteur au-dessus du sol auxquelles les appareils peuvent se mettre en autorotation ou effectuer un atterrissage en toute sécurité après une perte de puissance moteur. Le diagramme est également fondé sur l'hypothèse que le pilote est en mesure de mener à bien un atterrissage sans moteur en toute sécurité.
Comme tel, le diagramme hauteur/vitesse est élaboré en fonction d'essais progressifs menés par les pilotes d'essai du constructeur, au cours des essais en vol qui ont servi à la certification initiale. Le diagramme hauteur/vitesse ne représente pas une limite dans le manuel de vol du giravion; il sert plutôt à guider les pilotes en leur indiquant les profils de vol qui représentent un plus grand risque à la suite d'une perte de puissance moteur. Le diagramme hauteur/vitesse indique donc les combinaisons de hauteur et de vitesse à éviter ou à franchir rapidement. Ces combinaisons sont clairement indiquées dans le diagramme par des zones ombragées (hachurées).
Le diagramme hauteur/vitesse en deux volets de l'hélicoptère Bell 206B se trouve dans le manuel de vol du giravion (Section 3 – Performance), et est présenté dans les annexes D et E du présent rapport. Il est important de souligner que les vitesses sont données en milles à l'heure (mi/h). Le diagramme hauteur/vitesse indique qu'un pilote ne devrait pas s'attendre à pouvoir se mettre en autorotation complète si l'hélicoptère se trouve entre 40 et 200 pieds au-dessus du sol, à moins que sa vitesse indiquée ne soit d'au moins 45 mi/h. Dans le cas de C-GCHE, l'hélicoptère se trouvait à environ 120 pieds agl et évoluait à environ 30 mi/h. À une telle hauteur et une telle vitesse, l'hélicoptère n'aurait pas pu se mettre en autorotation complète avant de heurter le sol.
Résistance à l'impact et possibilité de survie
Les lourds dommages causés à la cellule témoignent de la violence de l'impact, et sont compatibles avec ceux causés par une vitesse verticale élevée. De tels dommages indiquent que les forces d'impact dépassaient le niveau de tolérance d'un être humain, et que personne n'aurait pu y survivre. Le piéton a été heurté violemment par une pale du rotor principal, et il n'aurait pu survivre au traumatisme. Les renseignements médicaux et la nature des blessures confirment que le pilote et le passager assis dans le siège avant du poste de pilotage portaient une ceinture-baudrier complète, et que le pilote portait un casque. Le passager assis dans le siège arrière portait également une ceinture-baudrier complète.
Exigences du Règlement de l'aviation canadien concernant les vols au-dessus des zones bâties
Le Règlement de l'aviation canadien (RAC) et les Normes de service aérien commercial (NSAC) prescrivent l'altitude à laquelle un aéronef peut voler. Ces exigences comprennent : l'article 602.14 du RAC – Altitudes et distances minimales; l'article 602.15 du RAC – Vol à basse altitude — Autorisation; l'article 702.22 du RAC – Zone bâtie et zone de travail aérien et l'article 722.22 des NSAC – Zone bâtie et zone de travail aérien.
L'article 602.14 du RAC est une interdiction générale, en vertu de laquelle on ne peut utiliser un aéronef au-dessus d'une zone bâtie à moins que celui-ci évolue à une altitude qui permettrait d'effectuer un atterrissage sans constituer un danger pour les personnes ou les biens à la surface. Dans tous les cas, l'altitude que doit respecter un hélicoptère est de 1000 pieds au-dessus de l'obstacle le plus élevé situé à une distance de 500 pieds ou moins de l'aéronef, mesurée horizontalement. Dans les autres cas, l'aéronef ne peut être utilisé à une distance inférieure à 500 pieds de toute personne, tout navire, tout véhicule ou toute structure. L'article 602.12 du RAC considère qu'un hélicoptère est utilisé au-dessus d'une zone bâtie s'il se trouve à une distance de moins de 500 pieds, mesurée horizontalement, de la zone bâtie en question.
Les articles du RAC reconnaissent que certains travaux aériens nécessitent de voler à des altitudes moins élevées. Pour les vols au-dessus des zones bâties, l'article 602.15 du RAC offre deux solutions. Dans le présent cas, seule la deuxième solution, le paragraphe 602.15(2), aurait permis d'utiliser un aéronef à une altitude inférieure pourvu que le vol soit autorisé en vertu de la sous-partie 603 – Opérations aériennes spécialisées ou de l'article 702.22 du RAC. Même si le vol en question servait à des fins d'inspection aérienne, il était effectué contre rémunération et constituait donc une activité commerciale, dans quel cas il devait être conforme aux exigences figurant dans la partie VII du RAC et non celles de la sous-partie 603.
L'entreprise Bighorn Helicopters Inc. est titulaire de deux certificats d'exploitation aérienne délivrés en vertu de la sous-partie 702 du RAC – Opérations de travail aérien, et de la sous-partie 703 du RAC – Exploitation d'un taxi aérien. Comme l'accident en question vise des travaux de vérification de lignes de transport d'électricité, il devait fort probablement avoir été autorisé en vertu du certificat visé par la sous-partie 702.
Le paragraphe 702.22(2) permet à une personne d'effectuer un vol au-dessus de zones bâties à une altitude et à une distance inférieures à celles comprises dans l'interdiction générale, si la personne a reçu l'autorisation du ministre ou si elle y est autorisée aux termes d'un certificat d'exploitation aérienne, et si elle satisfait aux NSAC.
Pour obtenir une autorisation d'exploitation aérienne, le paragraphe 722.22(1) des NSAC stipule que l'exploitant aérien doit présenter le plan de la zone de travail aérien au bureau régional de l'aviation de Transports Canada au moins cinq jours ouvrables avant la tenue des opérations et donne les renseignements qui doivent être fournis. En outre, le paragraphe 722.22(3) indique que l'exploitant aérien doit présenter une demande, démontrer la nécessité d'obtenir une autorisation d'exploitation aérienne, et modifier le manuel d'exploitation de sa compagnie pour y inclure les routes et leurs conditions d'utilisation.
On ne connaît pas les critères particuliers qu'utilise Transports Canada pour accorder ou refuser une autorisation permettant de satisfaire aux exigences liées aux procédures et aux mesures de précaution à prendre pour s'assurer que le travail aérien ne présentera aucun danger pour les personnes ou les biens à la surface, comme les emplacements pouvant servir à un atterrissage forcé en cas d'urgence. En outre, les normes ne mentionnent pas le type d'aéronef qui peut être utilisé pour de tels vols, par exemple, les circonstances qui dicteraient l'utilisation d'un aéronef monomoteur ou d'un aéronef multimoteur.
En résumé, l'entreprise Bighorn Helicopters Inc. ne pouvait pas tirer profit de ses droits et privilèges en vertu du paragraphe 602.15(1). Elle n'était pas visée par la sous-partie 603; elle était plutôt tenue de satisfaire aux exigences de l'interdiction générale, conformément à l'article 602.14 et/ou aux conditions stipulées dans la sous-partie 702. Dans son manuel d'exploitation, l'entreprise Bighorn Helicopters Inc. ne mentionne pas les activités d'inspection aérienne à basse altitude. Elle n'avait pas demandé ni reçu une autorisation du ministre des Transports, et elle n'avait pas présenté un plan de la zone de travail aérien.
Vols antérieurs à basse altitude
Au Canada, les vols d'inspection aérienne à basse altitude au-dessus de zones bâties sont effectués depuis au moins 30 ans et, depuis ce temps, des exigences réglementaires régissant de tels vols ont été mises en place sous une forme ou sous une autre.
Pendant l'enquête, on a mené un sondage officieux auprès des exploitants d'hélicoptère. Il s'est avéré que l'interprétation et la mise en application des exigences concernant l'altitude de vol étaient bien mal comprises. Au Canada, il est fort probable que les vols d'inspection aérienne à basse altitude au-dessus des zones bâties ne sont pas entièrement conformes aux exigences réglementaires.
Analyse
L'hélicoptère a fonctionné normalement jusqu'à ce qu'un événement provoque une perte de puissance ou l'arrêt du moteur. La cause de la perte de puissance moteur n'a pas été déterminée. La panne a entraîné une baisse rapide du régime rotor à un point tel que le pilote n'a pas été en mesure de maîtriser efficacement l'hélicoptère. Ce dernier est descendu presque à la verticale et s'est écrasé lourdement sur la route, où il s'est affaissé. Les trois occupants n'auraient pas pu survivre aux forces d'impact, et le piéton a été violemment heurté par une pale du rotor. En résumé, l'accident est attribuable à deux causes : une perte de puissance moteur suivie d'une perte de maîtrise en vol.
L'analyse portera sur la perte de puissance moteur, la possibilité que le fonctionnement du régulateur de carburant ou du régulateur de turbine de travail ait contribué à l'accident ainsi que sur les performances de vol de l'hélicoptère et leurs effets sur les circonstances de l'accident. En outre, elle abordera la question de l'interprétation des articles pertinents du RAC.
Perte de puissance moteur
Une perte de puissance moteur est causée par une manœuvre du pilote ou un problème mécanique. Un pilote peut relâcher la manette des gaz ou fermer le robinet coupe-feu, mais compte tenu du profil de vol à basse altitude en question, il n'existe aucun scénario qui aurait poussé un pilote expérimenté à poser un tel geste dans de pareilles conditions de vol, sauf dans un seul cas : une perte complète de la poussée du rotor arrière. La poutre de queue et le rotor de queue n'ont pas été détruits dans l'accident, et l'examen n'a révélé aucune défaillance du rotor de queue. Par conséquent, il est fort peu probable que le pilote ait délibérément posé un geste pouvant entraîner une perte de puissance moteur.
Un hélicoptère comprend trois parties principales : le moteur (ou les moteurs) et ses systèmes connexes, la chaîne dynamique du rotor ainsi que la cellule et ses circuits connexes. On peut raisonnablement prétendre que peu de défaillances de la cellule peuvent causer une perte de puissance ou un arrêt du moteur à turbine d'un hélicoptère. Malgré une destruction presque complète de l'hélicoptère, des composants critiques ont été épargnés, et aucune preuve n'indiquait qu'un problème lié à la cellule ou à la chaîne dynamique aurait causé la perte de puissance moteur.
En ce qui concerne le moteur, un manque de carburant ou une panne d'alimentation en carburant peut également être une cause de perte de puissance. Dans l'accident en question, un manque de carburant ne pouvait pas constituer un facteur contributif, car une quantité importante de carburant s'est déversée sur le lieu de l'écrasement. L'hypothèse d'une panne d'alimentation en carburant provoquée par une conduite de carburant bloquée ou fissurée, par exemple, ne peut être écartée.
Perte de maîtrise en vol
Rien n'indiquait qu'avant l'accident, la défaillance d'une commande de vol ou du système d'entraînement rotor aurait pu contribuer à une perte de maîtrise en vol de l'hélicoptère.
Performances du moteur
Aucun indice n'a été relevé pouvant suggérer qu'un problème mécanique du module moteur survenu avant l'écrasement ait pu contribuer à une perte de puissance moteur.
Performances du régulateur de carburant
Si le régulateur de carburant avait mal fonctionné de quelque façon que ce soit, les répercussions sur le fonctionnement du moteur auraient pu être immédiates. Le régulateur de carburant aurait pu mal fonctionner à cause d'une défaillance interne, de conduites pneumatiques bloquées ou ayant des fuites, ou à la suite de commandes irrégulières provenant du régulateur de turbine de travail. Quelle que soit la raison, le régulateur de carburant n'aurait pas réglé le moteur comme il se doit. Selon le type de défectuosité, le régulateur de carburant aurait pu commander au moteur d'augmenter ou de réduire sa vitesse, et le régime rotor aurait augmenté ou diminué en conséquence. On reconnaît que le régime moteur et le régime rotor ont soudainement diminué à peine quelques secondes avant l'écrasement, et que la vitesse du rotor a chuté considérablement pendant la descente.
Le régulateur de carburant accidenté a été endommagé par la chaleur, et des essais fonctionnels n'ont pu être menés. Par conséquent, le fonctionnement en service du régulateur de carburant n'a pu être évalué. Un examen du régulateur de carburant et de ses composants n'a pas permis de déterminer si un mode de défaillance aurait mené à la perte subite de puissance du moteur. Toutefois, l'examen n'a pas permis d'éliminer la possibilité d'un mauvais fonctionnement du régulateur de carburant. Ce dernier pourrait avoir accéléré la perte de puissance, et ce, à lui seul ou de pair avec le régulateur de turbine de travail.
Performances du régulateur de turbine de travail
Comme le régulateur de turbine de travail était neuf lorsqu'il a été posé et qu'il faisait partie du moteur depuis ce moment-là, on peut présumer que la cale d'espacement qu'on a trouvée lâche avait été placée sur la tige au moment de la fabrication conformément aux spécifications qui s'appliquaient avant la modification de conception. Aucune anomalie fonctionnelle du régulateur de turbine de travail n'a été signalée au cours des 1100 heures de service totalisées depuis sa pose dans le moteur accidenté, en juin 2006. Toutefois, compte tenu de la durée de vie utile moyenne particulièrement faible des dispositifs, il se peut que le régulateur de turbine de travail ait mal fonctionné.
Environnement d'utilisation
La présence de plusieurs conditions d'utilisation représentait un défi plus important qu'à la normale pour le pilote qui devait effectuer un atterrissage d'urgence après une perte de puissance moteur, notamment :
- des obstacles sur la trajectoire de vol finale;
- une faible vitesse indiquée;
- une faible altitude au-dessus du sol;
- un faible régime rotor;
- peu de temps pour l'exécution de manœuvres.
Chacun des facteurs énumérés ci-dessus comporte une difficulté considérable en soi pour un pilote qui tente de réussir une manœuvre, mais combinés, ils constituent des défis d'utilisation qu'un pilote risque de ne pas pouvoir relever. En outre, chaque facteur a un effet synergétique négatif sur l'autre, et la situation qui en résulte se dégrade rapidement.
Renseignements sur le manuel de vol du giravion
Le manuel de vol du giravion contient de précieux renseignements définissant les conditions d'utilisation qui présentent des risques élevés en cas de perte de puissance du moteur. Le diagramme hauteur/vitesse indique qu'à basse altitude et à basse vitesse, les pilotes auront beaucoup de difficulté à poser un hélicoptère en toute sécurité si un événement nécessitant un atterrissage immédiat survient, par exemple une défaillance du moteur. Dans le diagramme hauteur/vitesse, les zones de risques élevés sont marquées comme étant des situations « à éviter » ce sont les pires circonstances auxquelles les pilotes devront faire face lors de manœuvres de sortie.
Conditions de vol précédant l'accident
Lors de l'examen de la trajectoire de vol de l'hélicoptère accidenté, il est possible de voir que l'appareil a été fréquemment exposé aux zones comportant des risques élevés « à éviter » figurant sur le diagramme hauteur/vitesse lors de son passage au-dessus des zones bâties de Cranbrook. Dans de telles conditions, l'hélicoptère n'aurait pas disposé de suffisamment d'altitude ou de temps pour se mettre en autorotation à la suite d'une perte soudaine de puissance du moteur. Par conséquent, le pilote n'aurait pas eu l'occasion de maintenir son régime rotor, et l'hélicoptère aurait rapidement adopté une vitesse verticale de descente élevée. Toute manœuvre du pilote pour éviter des obstacles aurait nui à cette condition qui se dégradait.
Vol à basse altitude
La probabilité qu'une perte de puissance se produise n'est pas tributaire de l'altitude, de la vitesse ou du relief. Par contre, le risque de rater un atterrissage à la suite d'une perte de puissance augmente si l'altitude et la vitesse sont basses et si le relief est accidenté. Le diagramme de hauteur/vitesse présume que le relief convient à l'atterrissage, et tient seulement compte de l'altitude et de la vitesse; il ne tient compte d'aucun autre facteur d'exploitation, comme les compétences et l'expérience du pilote, les conditions météorologiques ou les obstacles. Le diagramme hauteur/vitesse représente donc le meilleur scénario possible, et indique le profil optimal de la trajectoire de vol pour le décollage, l'atterrissage et les régimes en route, en se fondant sur les performances aérodynamiques de l'hélicoptère.
Les articles du RAC prescrivent les conditions acceptables de vol d'hélicoptère à basse altitude au-dessus des zones bâties, qui permettent habituellement d'éviter tout danger, ainsi qu'une altitude permettant d'effectuer un atterrissage immédiat sans danger. Les dispositions du RAC sont fondées sur la gestion des risques, et ne tiennent pas particulièrement compte des risques aérodynamiques, comme le fait le diagramme hauteur/vitesse. Par exemple, même si le RAC permet de déroger aux limites minimales d'altitude, il ne laisse pas croire que l'hélicoptère peut voler en toute sécurité à la même hauteur dans les limites des zones « à éviter » du diagramme hauteur/vitesse.
Le fait que l'hélicoptère ait été utilisé dans les zones « à éviter » du diagramme hauteur/vitesse ou de façon non conforme aux articles pertinents du RAC qui traitent des vols à basse altitude n'est aucunement lié à la perte de puissance moteur, et il n'en était pas la cause. Toutefois, les graves conséquences ont été influencées par la basse altitude, la vitesse réduite et l'environnement de l'aire d'atterrissage.
Moyens de défense lors de vols à basse altitude
Les renseignements contenus dans le manuel de vol du giravion (comme le diagramme hauteur/vitesse) aident les exploitants et les pilotes à déterminer un bon profil de vol pour leur mission, et tiennent compte des performances de l'hélicoptère. Même si les articles du RAC prescrivent des limites et des procédures réglementaires, il est important que celles-ci soient appliquées parallèlement aux renseignements du manuel de vol du giravion. Il est important de souligner qu'un thème récurrent du RAC est le fait que les activités aériennes ne doivent pas constituer un danger pour les personnes ou les biens à la surface. Par conséquent, en fin de compte, il incombe à chacun des exploitants et des pilotes d'hélicoptère d'adopter des pratiques d'utilisation sûres.
Exigences du Règlement de l'aviation canadien concernant les vols à basse altitude au-dessus de zones bâties
Les exigences régissant les vols effectués au-dessus des zones bâties se trouvent dans différents articles de la réglementation aérienne. Elles sont complexes et leur interprétation peut varier grandement, par exemple savoir si un aéronef est ou n'est pas dans une zone bâtie, ou encore connaître les exigences qui seraient applicables à quel endroit et dans quelles circonstances.
Bien que l'hélicoptère accidenté servait à l'inspection aérienne des lignes de transport d'électricité, ces dernières se trouvaient dans un quartier résidentiel. L'hélicoptère a effectué des manœuvres au-dessus des maisons à proximité des lignes de transport d'électricité. Par conséquent, le vol en question s'est déroulé au-dessus d'une zone bâtie, et il aurait fallu respecter l'interdiction générale stipulée dans l'article 602.14 et/ou les conditions prescrites dans la sous-partie 702.
Comme de nombreux exploitants, l'entreprise Bighorn Helicopters Inc. a interprété ses activités d'inspection aérienne de lignes de transport à basse altitude comme étant une inspection en vol ou une activité menée dans une zone autre qu'une zone bâtie. Si la dernière interprétation était vraie, l'entreprise Bighorn Helicopters Inc. se serait fort probablement crue dispensée de l'interdiction générale, conformément au paragraphe 602.15(1). Toutefois, les inspections en vol se limitent à l'inspection d'aides à la navigation et à l'évaluation d'obstacles.
Si l'entreprise considérait ses activités comme étant menées ailleurs qu'au-dessus d'une zone bâtie, l'interdiction générale aurait prescrit à l'hélicoptère de voler à au moins 500 pieds, mais l'alinéa 602.15(2)b) permet d'effectuer des vols à des altitudes et à des distances inférieures si l'aéronef est utilisé sans constituer un danger pour les personnes ou les biens à la surface, et si l'aéronef est utilisé aux fins d'inspection aérienne, ce qui comprend les lignes de transport d'électricité. Dans de telles circonstances, il n'est pas nécessaire d'obtenir une autorisation ou une approbation du ministre.
Quelles que soient les exigences particulières, la condition voulant que de tels vols ne doivent pas constituer un danger pour les personnes ou les biens à la surface est constamment répétée dans la réglementation. En l'absence de directives et de conseils précis, les entreprises peuvent choisir les exigences qui imposent les conditions les moins strictes. Par conséquent, les vols servant à l'inspection aérienne à basse altitude au-dessus des zones bâties continueront à constituer un danger pour les personnes et les biens à la surface. Bien que Transports Canada puisse ne pas avoir précisé les critères servant à accorder ou à refuser les autorisations de vols à basse altitude au-dessus de zones bâties, il est devenu évident, au cours de la présente enquête, que le vol en question n'aurait fort probablement pas été autorisé, car il s'agissait d'un hélicoptère monomoteur.
L'enquête a donné lieu au rapport de laboratoire suivant :
- LP 098/2008 — Bellows Analysis (analyse du soufflet)
On peut obtenir ce rapport en s'adressant au Bureau de la sécurité des transports du Canada.
Faits établis
Faits établis quant aux causes et aux facteurs contributifs
- Le moteur a perdu de la puissance à une altitude et à une vitesse qui ne permettaient pas une mise en autorotation complète. Par conséquent, le régime rotor a chuté rapidement alors que l'appareil atteignait une vitesse verticale de descente très élevée, ce qui a causé sa violente collision avec le relief.
- L'hélicoptère était utilisé à une altitude et à une vitesse qui l'auraient empêché de descendre et d'atterrir en toute sécurité advenant une perte de puissance moteur, selon ce qui avait été déterminé par le constructeur de l'hélicoptère.
- Durant les dernières secondes de vol, la présence de plusieurs obstacles sur la trajectoire de l'hélicoptère gênait le pilote, et ceux-ci ne lui laissaient qu'un seul emplacement convenable pour atterrir, lequel se trouvait au-delà de la distance franchissable en vol plané de l'hélicoptère. Les efforts du pilote pour éviter la maison et atteindre l'emplacement en question n'ont fait qu'accroître la vitesse verticale de descente déjà élevée.
- L'hélicoptère n'effectuait pas une descente maîtrisée et, en plus du régime rotor qui diminuait, la capacité du pilote à gouverner l'appareil décroissait si rapidement que l'hélicoptère est tombé en chute libre d'une hauteur de 85 pieds au-dessus du sol.
Faits établis quant aux risques
- Les vols à une altitude ne permettant pas à un hélicoptère monomoteur d'effectuer une descente, des manœuvres et un atterrissage en toute sécurité, si une situation l'oblige à se poser immédiatement, présentent un risque pour les personnes et les biens, plus particulièrement dans les zones bâties.
- Les exigences du Règlement de l'aviation canadien concernant les vols d'inspection aérienne à basse altitude au-dessus de zones bâties sont complexes et laissent place à toutes sortes d'interprétations. En l'absence de directives et de conseils précis, les entreprises peuvent choisir les exigences qui leur imposent les conditions les moins strictes. Par conséquent, les vols d'inspection aérienne à basse altitude au-dessus des zones bâties continueront de constituer un danger pour les personnes et les biens à la surface.
Autre fait établi
- La cause de la perte de puissance moteur n'a pas été déterminée. Il est possible qu'une défaillance mécanique du régulateur de carburant ou du régulateur de turbine de travail, une panne d'alimentation carburant, ou une combinaison de ces éléments, ait pu se produire.
Mesures de sécurité
Mesures prises
Transports Canada
Depuis l'accident, Transports Canada a élaboré un graphique de cheminement logique afin de guider les pilotes et les exploitants qui doivent prendre une décision concernant l'altitude et les distances minimales au-dessus des zones bâties prescrites par le Règlement de l'aviation canadien (RAC). Transports Canada prévoit reproduire ce graphique de cheminement logique dans la publication TP 185F, Sécurité aérienne – Nouvelles.
Transports Canada a effectué des recherches dans le Système de rapports de difficultés en service afin de trouver des rapports sur les régulateurs de turbine de travail, et a extrait 400 rapports. Transports Canada a envoyé une lettre à la Federal Aviation Administration (FAA), pays responsable de la définition de type, pour lui demander de vérifier ses données sur les rapports de difficultés en service. On a demandé à la FAA de fournir son analyse sur la fiabilité du régulateur et de déterminer si des mesures correctives s'imposent.
Bighorn Helicopters Inc.
L'entreprise Bighorn Helicopters Inc. a passé en revue ses pratiques d'utilisation concernant les vols à basse altitude, et a mis en place un meilleur système de surveillance interne. En outre, elle a entamé l'élaboration d'un système distinct de gestion de la sécurité.
BC Hydro
Après l'accident, BC Hydro a immédiatement interrompu toutes ses activités menées à bord d'hélicoptères pour permettre l'élaboration d'une politique et de procédures connexes concernant l'utilisation d'hélicoptères. En juin 2008, une politique provisoire à l'intention des usagers a été mise de l'avant. En voici les grandes lignes :
- justifier l'utilisation d'un hélicoptère;
- choisir l'hélicoptère qui convient à la tâche;
- obtenir l'approbation de la haute direction pour chaque demande de vol à bord d'un hélicoptère.
La politique en question vise à assurer une définition et une gestion préalables des risques, de façon à ce que seuls les vols nécessaires soient coordonnés et approuvés. La politique et les procédures ont été établies provisoirement, en attente de l'élaboration et de la mise en œuvre d'un système de gestion des vols d'hélicoptère plus poussé.
BC Hydro a également retenu les services d'une entreprise internationale de gestion des risques en aéronautique pour évaluer les risques de tous les profils des vols effectués par BC Hydro. Par la suite, un cadre a été élaboré pour un système de gestion des vols d'hélicoptère, lequel comprend la définition et la réduction des risques, la sélection et le contrôle des fournisseurs, les critères de sélection de l'hélicoptère, les procédures d'utilisation normalisées et la formation connexe. Ultérieurement, BC Hydro a engagé un consultant canadien en aéronautique en vue d'orienter le travail nécessaire à la mise en œuvre du système en question.
En attendant, BC Hydro a mis en œuvre une politique provisoire à l'échelle de l'entreprise qui prescrit l'utilisation d'hélicoptères bimoteurs pour toute activité où il serait risqué d'utiliser un hélicoptère monomoteur, comme dans les zones « à éviter » du diagramme hauteur/vitesse. On continue d'utiliser des hélicoptères monomoteurs pour les activités d'inspection de lignes de transport d'électricité, mais il est strictement défendu d'effectuer de tels vols s'ils entrent dans les zones « à éviter » du diagramme hauteur/vitesse. De plus, BC Hydro étudie l'utilisation de technologies récentes, comme le Lidar et des systèmes d'imagerie de très haute qualité, qui permettent de collecter des données à partir d'un hélicoptère évoluant en dehors de l'enveloppe hauteur-vitesse et ne transportant pas de passagers à son bord.
Le présent rapport met un terme à l'enquête du Bureau de la sécurité des transports du Canada (BST) sur cet événement. Le Bureau a autorisé la publication du rapport le .
Annexes
Annexe A – Route prévue pour l'inspection des lignes de transport d'électricité
Annexe B – Carte de la ville de Cranbrook
Annexe C – Plafond en vol stationnaire hors effet de sol (HOGE)
(Ce document n'existe pas en français.)
Annexe D – Diagramme hauteur/vitesse
(Ce document n'existe pas en français.)
Annexe E – Graphique altitude-masse pour le diagramme hauteur/vitesse
(Ce document n'existe pas en français.)